
A common EU approach to
liability rules and
insurance for connected
and autonomous vehicles
European Added Value
Assessment
Accompanying the
European Parliament's
legislative own-initiative
report (Rapporteur: Mady
Delvaux)

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 1
The European added value of a common EU approach to
liability rules and insurance for connected and autonomous
vehicles
Study
In accordance with Article 225 of the Treaty on the Functioning of the European Union, the
European Parliament has a right to request that the European Commission take legislative action.
The Conference of Presidents of the European Parliament therefore authorised its Committee on
Legal Affairs (JURI) to draft a legislative initiative report on the civil law rules on robotics.
1
All European Parliament legislative initiative reports (INI) must automatically be accompanied
by a detailed European added value assessment (EAVA). Accordingly, the JURI Committee asked
the Directorate-General for Parliamentary Research Services (EPRS) to prepare an EAVA to
support the legislative initiative report on civil law rules on robotics prepared by Mady Delvaux.
The purpose of the European added value assessment is to support a legislative initiative of the
European Parliament by providing a scientifically based evaluation and assessment of the
potential added value of taking legislative action at EU level. In accordance with Article 10 of the
Interinstitutional Agreement on Better Law-Making,
2
the European Commission should respond
to a request for proposals for Union acts made by the European Parliament by adopting a specific
communication. If the Commission decides not to submit a proposal, it should inform the
European Parliament of its detailed reasons, including a response to the analysis on the potential
European added value of the measure requested.
Abstract
The findings of this European added value assessment (EAVA) suggest that it is necessary to
revise the current legislative EU framework for liability rules and insurance for connected and
autonomous vehicles. Not only would revision ensure legal coherence and better safeguarding
of consumers rights but it would also be likely to generate economic added value. It is argued
that accelerating the adoption curve of driverless or autonomous vehicles (AVs) by five years has
the economic potential to generate European added value worth approximately €148 billion.
1
Report with recommendations to the Commission Civil Law Rules on Robotics, 2015/2103(INL), European
Parliament, Rapporteur: Mady Delvaux (S&D, Luxembourg).
2
Interinstitutional Agreement between the European Parliament, the Council of the European
Union and the European Commission on Better Law-Making, OJ L 123, 12.5.2016, pp. 1-14.
European Added Value Assessment
PE 615.635 2
This analysis has been drawn up by the European Added Value Unit within the European
Parliamentary Research Service (EPRS). It builds on two expert research studies carried out by
the Utrecht Centre for Accountability and Liability Law and RAND Europe for the European
Added Value Unit of the European Parliament's DG EPRS. The two expert research papers are
presented in full in Annex I and Annex II
Annex I
Legal analysis of the EU common approach on the liability rules and insurance related to
connected and autonomous vehicles , by Dr E.F.D. Engelhard and R.W. de Bruin, LL.M., within
the Utrecht Centre for Accountability and Liability Law
Annex II
Socio-economic analysis of the EU common approach on the liability rules and insurance
related to connected and autonomous vehicles by Charlene Rohr and Fay Dunkerley at RAND
Europe and by Professor David Howarth from the University of Cambridge.
AUTHOR
Tatjana Evas
European Parliamentary Research Service, Impact Assessment and European Added Value
Directorate, European Added Value Unit
European Parliament
B-1047 Brussels
To contact the unit, please e-mail EPRS-EuropeanAdded[email protected]
LINGUISTIC VERSIONS
Original: EN
Manuscript completed in February 2018.
© European Union, 2018.
This document is available on the internet at:
http://www.europarl.europa.eu/thinktank/en/home.html
DISCLAIMER
This document is prepared for, and addressed to, the Members and staff of the European
Parliament as background material to assist them in their parliamentary work. The content of the
document is the sole responsibility of its author(s) and any opinions expressed herein should not
be taken to represent an official position of the Parliament.
Reproduction and translation for non-commercial purposes are authorised, provided the source
is acknowledged and the publisher is given prior notice and sent a copy.
PE 615.635
ISBN 978-92-846-2550-5
DOI: 10.2861/282501
QA-04-18-027-EN-N

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 3
Table of contents
Executive summary ....................................................................................................................... 5
1. Introduction ................................................................................................................................ 7
1.1. Background ....................................................................................................................... 7
1.2. Methodology and scope of the European added value assessment .......................... 8
2. EU law and policy context ........................................................................................ 11
2.1. Applicable EU law .......................................................................................................... 11
2.2. EU programming documents relating to AVs ............................................................ 12
2.3. Position of the European Parliament ........................................................................... 13
2.3.1 Results of the European Parliament's public consultation ........................... 14
2.4. Position of the European Commission ........................................................................ 16
2.4.1 Review of existing legislation ........................................................................... 16
2.4.2 Studies on AVs.................................................................................................... 18
3. Limitations of and gaps in the current framework ............................................. 20
3.1. Existing risks: shift in liability ...................................................................................... 22
3.1.1 Product Liability Directive and Motor Insurance Directive ............................ 22
3.2. New risks not explicitly addressed by current EU legislation on motor vehicles . 24
3.3. Procedure and standards for establishing liability .................................................... 27
4. EU policy response to current gaps and limitations............................................ 27
4.1. Need to take action or intervene at EU level .............................................................. 28
4.2. Subsidiarity and proportionality .................................................................................. 29
4.3. Policy options and their impact .................................................................................... 29
5. European added value .............................................................................................. 32
5.1 Economic analysis .......................................................................................................... 32
5.2. Comparative legal analysis ........................................................................................... 33
5.3. Comparative assessment of policy options and European added value ................ 35
6. Conclusions ................................................................................................................ 37

European Added Value Assessment
PE 615.635 4
List of tables
Table 1 – Methodology for measuring European added value ......................................................... 10
Table 2 – Main EU legal and policy instruments on civil liability relating to motor vehicles ...... 11
Table 3 – Main activities of the European Commission in relation to the deployment of AVs .... 16
Table 4 – Main studies related to liability issues for AVs by the European Commission ............. 19
Table 5 – Main risks in the current system versus those in a mobility system based on AVs ...... 21
Table 6 – Summary of the main gaps under the current PLD regulation that could potentially
have a negative effect on consumers in the light of the introduction of AVs ................ 23
Table 7 – Summary of the main gaps under current MID and national traffic liability rules ..... 24
Table 8 – Policy option 1: baseline scenario ......................................................................................... 30
Table 9 – Policy option 2: reform of Product Liability Directive ....................................................... 30
Table 10 – Policy option 3: reform of the Motor Insurance Directive ............................................... 31
Table 11 – Policy option 4: new legislation and no fault insurance .................................................. 31
Table 12 – Summary of cost-benefit analysis of scenarios for the EU (€ billion in 2015 prices) ... 33
Table 13 – Summary: potential European added value ..................................................................... 35
Table 14 – Comparative policy options – European added value assessment ................................ 36
Table 15 – Summary of impacts by stakeholder group included in the CBA ............................... 162
Table 16 – Proportion of new cars and all cars that are FAVs, by scenario (%) ............................ 166
Table 17 – Summary CBA impacts of scenarios for the EU (€bn in 2015 prices) .......................... 169
Table 18 – Assessment of legislative policy options ......................................................................... 173
List of figures
Figure 1 – Stakeholders' concerns about liability issues .................................................................... 15
Figure 2 – Stakeholders' opinions on most urgent regulatory action ............................................... 15
Figure 3 – Overview of stakeholders' replies to Question 33 ............................................................ 17
Figure 4 – Overview of stakeholders' replies to Question 34 ............................................................ 17
Figure 5 – Baseline market penetration rates for FAVS ................................................................... 160

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 5
Executive summary
Two key trends are shaping the future of personal mobility: first, a shift from human (driver-
driven) to machine (driverless-supercomputer driven) control of vehicles and second, a shift from
individual to shared ownership of vehicles. This European added value assessment (EAVA)
focuses on the first trend, the shift from driver-driven to autonomous personal mobility, and
more specifically on the regulation of civil liability for autonomous vehicles (AVs) at EU level.
The main objective of this EAVA is to assess whether regulatory action on civil liability for AVs
is justified at EU level and, if so, what would be the expected benefits and costs of such
intervention. The analysis of European added value is informed by two expert studies specifically
commissioned by the EPRS: 'Socio-economic analysis of the EU common approach on liability
rules and insurance related to connected and autonomous vehicles' and 'Legal analysis of the EU
common approach on the liability rules and insurance related to connected and autonomous
vehicles'; it also draws on the results of the European Parliament's public consultation on robotics
and artificial intelligence and on publicly available statistical data and publications.
Accelerating the adoption curve for driverless or autonomous vehicles (AVs) by five years has
the economic potential to generate European added value worth approximately €148 billion. It
is therefore in the interest of the public regulator to ensure that the regulatory framework
facilitates the adoption of AVs, thus helping to generate economic value. The expert national
committees of Member States, high level expert groups set up by the European Commission, and
recently adopted European Parliament resolutions have all underlined that the liability issues
related to the adoption and use of AVs need to be clarified.
The appropriation of risks in relation to the use of motor vehicles is currently regulated by two
main EU legislative acts governing liability rules: the Motor Insurance Directive (2009/103/EC)
and the Product Liability Directive (85/374/EEC). The current EU system of appropriation of
risks related to motor vehicles generally works well and, as a comparative legal analysis suggests,
would in principle be able to deal with the introduction of AVs to the market. However, the
application of the existing rules to AVs will likely shift the existing balance in liability
distribution between consumers and producers, further accentuate existing gaps, and could
potentially contribute to legal and administrative costs in connection with uncertainties.
If the current EU framework is not adjusted, in addition to existing gaps in the current EU legal
framework, the introduction of AVs will contribute to the emergence of new gaps and legal grey
areas. This is because the current legal framework was not developed to deal with the liability
issues of AVs, which are technologically complex and stand distinctly apart from the motor
vehicles currently on the roads. Four main categories of risk relating to the liability issues raised
by AVs are likely to emerge or become significantly more prominent with the mass roll-out and
use of AVs. The new risks include: risks relating to the failure of operating software enabling an
AV to function, risks relating to network failures, risks related to hacking and cybercrime, and
risks/external factors relating to programming choices. These four issues are not at all or not
sufficiently addressed under the current Product Liability Directive - Motor Insurance Directive
framework.
If the above issues are not specifically addressed by the legislator, the current regulatory
framework will result in many uncertainties, in particular relation to the new groups of risk
identified above. In this context, it is likely that the cost of scientifically unknown risks will be

European Added Value Assessment
PE 615.635 6
borne by the injured parties and consumers will find it increasingly difficult to claim damages.
This could ultimately lead to reduced consumer confidence in AVs and, consequently, to
slower uptake of AVs in the market.
An analysis of the gaps and limitations of the existing EU regulatory framework suggests that EU
policy needs to respond by regulating liability issues relating to the roll-out and introduction
of AVs. EU action should address three main sets of issues: first, the limitations and gaps relating
to the current framework, specifically the shift in liability between parties; second, the need to
adjust the current framework or introduce new rules to cover new risks; and third, the need to
adjust or introduce new procedural rules allowing liability to be established for damages
involving or caused by AVs.
Four policy options to address the current shortcoming of the EU liability framework are
compared and analysed: the status quo (Option 1); reform of the Product Liability Directive
(Option 2); or Motor Insurance Directive (Option 3); and the introduction of new EU legislation
and setting up of a no-fault insurance framework for damages resulting from AVs (Option 4). A
comparative assessment is made of these policy options applying seven qualitative criteria: legal
certainty, potential litigation burden, impact on innovation, impact on level of consumer
protection, political acceptance, degree of regulatory intervention needed, and degree of
dependence on soft law. On this basis it is argued that Option 4 (new EU legislation and
insurance framework) is preferable as it has the greatest potential of the four policy options to
address three sets of outstanding issues and gaps identified through comparative legal analysis.
Revision of the existing regulation and/or the introduction of additional regulation on the
allocation of risks related to AVs has the economic potential to generate European added value
that could be lost if the no-action option is chosen. The European added value generated from
the roll-out of AVs would be generated mainly by legislative measures facilitating their earlier
adoption. Further added value from EU action could be generated at the mass AV adoption stage
by measures aimed at reducing transaction and litigation costs arising from regulatory
divergences between differing jurisdictions and measures to boost consumer trust in the new
technologies.
Coordinated action at EU level has the potential to contribute further to European added value
by reducing the transaction costs resulting from the fragmentation of national legal systems
and minimising litigation costs. Insufficient coordination among several jurisdictions on the
adoption of regulatory rules enabling the testing, licensing and operation of autonomous
technologies and vehicles could ultimately lead to unnecessary barriers to the development and
deployment of new technological solutions. Clear rules at EU level would meanwhile contribute
to legal certainty and would help to avoid transaction costs arising from divergent national legal
rules.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 7
1. Introduction
1.1. Background
Driverless or autonomous vehicles (AVs) promise to bring substantial economic and societal
benefits. It is widely assumed that driverless cars would have the potential, for example, to save
human lives, minimise the financial cost of car accidents, improve urban mobility, decrease
congestion and negative environmental impacts, provide more inclusive forms of mobility for the
elderly and people with special needs, and increase productivity.
3
According to World Economic
Forum estimates there is substantial economic value at stake for the industry (US$ 0.67 trillion)
and society (US$ 3.1 trillion) as a result of digital transformation in the automotive industry
already in the period between 2016 to 2025.
4
Connected and autonomous vehicles are significant sector of the EU economy. In 2016 the EU-
28 accounted for 21 % of global passenger car production
5
with 12.6 million people employed in
the automotive industry.
6
It is forecasted that by the year 2050, this sector of the industry will
contribute €17 trillion to the European economy
7
and as of 2020 (the year AVs are expected to be
introduced) add 0.15 % to Europe's annual gross domestic product (GDP) growth rate.
8
However, motor vehicles, and road mobility more generally, also create risks and thus require
public coordination, supervision and enforcement. The motor vehicles and road transport sector
is a densely regulated area.
9
At international level: the United Nations 1968 Vienna Convention
on Road Traffic regulates standard traffic rules; while the 1958 and 1998 Agreements of the United
Nations Economic Commission for Europe regulate technical requirements and type-approval
for motor vehicles.
10
The European Union also has a wide range of competences relating to the
production and use of motor vehicles. As a result there is a large number of EU regulatory acts
in the wide spectrum of policy areas relating to motor vehicles, including civil law (e.g. liability,
insurance, data protection, licensing and type approval); public law (e.g. traffic regulations and
safety) and norms and standards (e.g. consumer protection, and technical and environmental
standards).
11
The future of personal mobility is in the process of major qualitative change. This change is
deemed by experts to be akin to the shift from horse to automobile as a means of transportation
or the introduction of the railway. AVs are not yet another product improvement in a traditional
automotive industry. They are ushering in a disruptive technology that has the potential to
3
For an overview and analysis see, for example, Autonomous Vehicle Implementation Predictions,
Implications for Transport Planning, Victoria Transport Institute, 26 January 2018; and 'Autonomous
Vehicles: Are You Ready for the New Ride?', MIT Technology Review Insights, 9 November 2017.
4
Digital transformation: Reinventing the wheel: digital transformations in the automotive industry, World
Economic Forum, 2016.
5
2016 Production Statistics, International Organization of Motor Vehicle Manufacturers, see also Key
Figures, European Automobile Manufacturers Association.
6
See footnote above; also information provided by the European Commission.
7
F. Ranft, Freeing the Road: Shaping the future for autonomous vehicles, London, 2016.
8
Ibid.
9
For a regulatory overview of the main legislation at international and EU level see S. Pillath, Automated
vehicles in the EU, EPRS, European Parliament, January 2016.
10
Ibid.
11
There are more than 1800 EU regulatory acts relating to 'motor vehicles'.

European Added Value Assessment
PE 615.635 8
change what is now our conventional understanding of mobility, ownership and security. In this
context there is increasing evidence and growing numbers of calls from various stakeholders
arguing that the current regulatory framework, developed when the roll-out of autonomous
vehicles was, if anything, a very indistinct reality, is inadequate when faced with the current
state of innovation and digitalisation in the automotive industry.
This explains why now at all levels of governance – national, EU and international – there are
intensive discussions on the need and urgency to revise the current law and policy to enable the
testing of AVs and their introduction to the market. Indeed, AVs are already being widely tested
on public roads around the globe and according to the most recent estimates driverless, fully
autonomous vehicles will be on the market by 2020.
12
The representatives of the automotive
industry consider that the countdown to the mass production of autonomous cars has already
started and has come much sooner than most experts expected. This earlier than expected roll-
out of driverless vehicles is possible, inter alia, due to the cooperation between connected
industries, know-how and substantial financial investment in this type of technology.
13
Two key trends are shaping the future of personal mobility: first, a shift from human (driver-
driven) to machine (driverless-supercomputer driven) control of a vehicle and, second, a shift
from individual to shared ownership of vehicles.
14
1.2. Methodology and scope of the European added value
assessment
This European added value assessment (EAVA) focuses on the first trend, a shift from driver-
driven to autonomous personal mobility and, more specifically, on the regulation of the civil
liability of motor vehicles at EU level. According to a 2015 study published by the Organisation
for European Cooperation and Development (OECD) 'liability remains an important barrier for
the manufacturers and designers of autonomous vehicles'.
15
A similar conclusion is also reached
by the UK's Department for Transport, which finds it necessary to 'provide additional clarity and
certainty in legislation, to provide a sound basis upon which to allocate criminal and civil
liability'.
16
The consideration of issues relating to liability has also been on the agenda of all major
EU expert group discussions facilitated by the European Commission (i.e. GEAR 2030) and road
maps of Member States.
Against this backdrop, the main objective of this EAVA is to assess whether regulatory action
on the civil liability of AVs is justified at EU level; and if so what would be the expected
benefits as well as costs of such intervention. European added value is assessed both
quantitatively (economic analysis) and qualitatively (comparative legal analysis). The former is
based on the economic analysis of the possible added value of legislative developments in the EU
12
See for example also Uber/Volvo framework agreement to introduce robot taxis as early as 2019. Volvo
Group media statement from ‘Volvo Cars to supply tens of thousands of autonomous drive compatible cars
to Uber’, 20 November 2017.
13
J. Becker, 'BMW's driverless cars: A quantum leap to Level 5', 2025 AD, November 2017; see also
'Chipmaker Nvidia's CEO sees fully autonomous cars within 4 years', Reuters, October 2017.
14
Deloitte, The future of mobility, January 2017.
15
Automated and Autonomous Driving, Regulation under uncertainty, OECD, 2015, p.6.
16
The pathway to driverless cars: summary report and action plan, UK Department for Transport, 2015,
p. 10.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 9
liability framework on earlier deployment of AVs. A cost-benefit analysis (CBA) is applied to
explore the scale of social and economic benefits of a faster roll out and take-up of AVs in the
EU.
17
European added value is thus measured and quantified in terms of socio-economic costs
and benefits relating to a possible earlier than anticipated baseline roll-out of AVs.
This quantification approach and methodology is based on an assumption that AVs will bring
substantial economic and social benefits for the EU's legal and private persons and that therefore
their earlier roll-out in the EU would be advantageous. The quantitative analysis contributes to
the understanding of the scope of possible socio-economic gains for the EU related to earlier roll-
out of AVs as well as the influence of developments in EU liability legislation on the earlier
deployment of AVs. This analysis also informs a policy debate on the possible impact of EU
regulatory intervention on the industry's willingness to introduce AVs to the EU market. This
economic quantification however does not fully measure or quantify other aspects relating to
possible costs and benefits and wider possible impacts of the revision of EU civil liability rules in
relation to AVs. For example, the possible impact of the revision of the EU civil liability
framework on the coherence of the EU legal system, the achievement of the EU's objectives, and
the protection of fundamental free movement rights and fundamental freedoms are not (or not
fully) measured by the CBA.
To account for these limitations of the quantitative approach, the economic analysis is
supplemented by a qualitative assessment. The qualitative assessment approaches the question
of European added value from a broader policy perspective. It focuses not only on the
prerequisites of earlier deployment of AVs but also on the necessity and impact of possible EU
legislative intervention for the legal certainty and coherence of the EU's legal system, the scope
of legal protection provided by EU law, and efficiency of the EU rules.
The qualitative assessment is twofold. First, a comparative legal analysis is conducted to identify
legal gaps and shortcomings of the existing EU liability framework as applied to AVs. A
detailed inventory of applicable EU rules is necessary to understand whether and how the scope
of legal protection would change as a result of the roll-out of AVs; whether the current EU system
of rules will allow for efficient resolution of possible disputes, and how the coherence and
consistency of the EU legal system would be affected. Second, based on the review of gaps and
shortcomings, four policy options are suggested. The potential European added value of the four
policy options suggested is then measured and assessed on the basis of seven qualitative criteria;
these aim to measure the effectiveness, efficiency, coherence and political feasibility of
possible regulatory intervention. Effectiveness is measured in terms of the ability of the policy
intervention to address current legislative gaps and uncertainties; efficiency is measured in terms
of ease of applicability of the policy by stakeholders; coherence is measured as the ability of the
adopted rules to facilitate national and cross-border claims settlement and resolution of conflict
of law issues; finally, political feasibility is measured in terms of the legal procedure and the scope
of regulatory change needed.
17
For a detailed description of the methodology, method and model for quantification applied please see
Annex II (RAND study).

European Added Value Assessment
PE 615.635 10
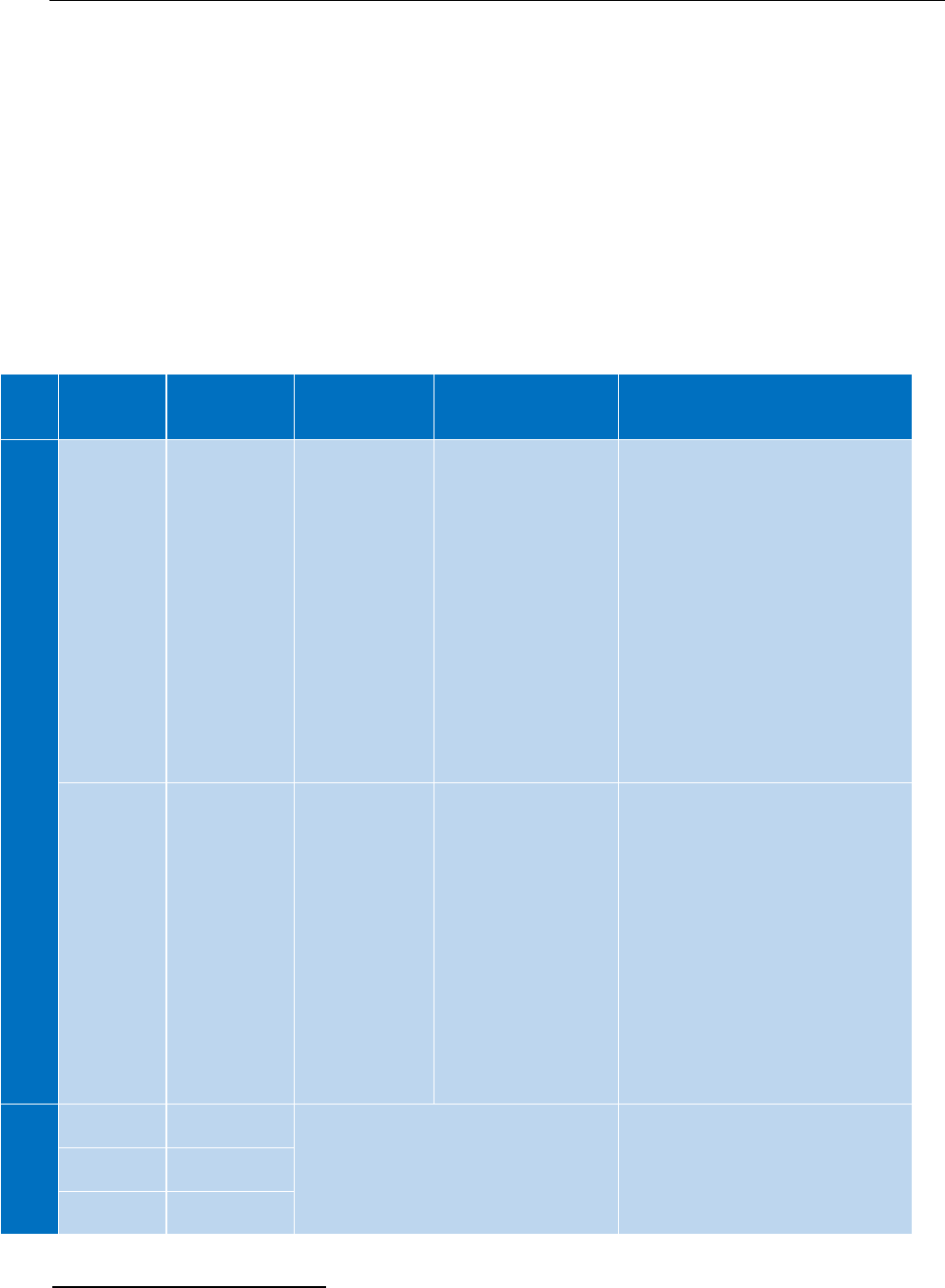
Table 1 – Methodology for measuring European added value
18
Scope
Method
Outcome
Quantitative
analysis
Economic analysis of
the possible EU added
value of legislative
changes to the EU
liability framework of
earlier deployment of
AVs
Cost-benefit analysis
Expert interviews with
stakeholders to verify
assumptions for the
quantification
Monetised
estimate of
European added
value in terms of
earlier deployment
of AVs
Qualitative
analysis
Legal analysis of gaps
and shortcomings of the
Product Liability
Directive and Motor
Insurance Directive
Comparative legal
analysis of selected
national traffic
regulation rules
Legal analysis of EU
and national rules on
cybersecurity, hacking
and data protection
Legal analysis of application
of EU law
Comparative legal analysis
of national regulation of
liability issues in Germany,
Sweden, the UK, the
Netherlands and Belgium
European added value is
measured by the ability of
the EU legislative
intervention to contribute to
the reduction of inefficiency,
ineffectiveness and
incoherencies of the current
legislative framework
European Parliament public
consultation on Robotics
and AI
Qualitative
assessment of
potential European
added value
measured against
seven qualitative
criteria
Limitations
Issues of criminal liability or other adjunct areas of law, including for
example a detailed analysis of data protection and privacy, are excluded.
A comprehensive comparative analysis of all EU Member State legislation
and policy is beyond the scope of the present analysis.
Source: Information compiled by the author.
This EAVA does not cover issues of criminal liability or other related areas of law, nor does it
provide for example a detailed analysis of data protection and privacy. It focuses primarily on
EU-level regulation and thus comprehensive comparative analysis of Member State legislation
and policy is beyond its scope.
The EAVA is structured as follows: after this introduction, Section 2 outlines the current EU
regulatory framework for civil liability and explains how this framework could be applied to
AVs. Section 3 presents an analysis of the gaps and limitations of the current framework as
applied to the AVs. Building on this analysis, Section 4 focuses on possible EU policy responses
and discusses what action could be taken at EU level to address the current gaps. Finally,
Section 5 brings all the analysis together by providing an assessment of the European added value
of taking action at EU level.
18
A quantitative analysis and expert interviews were conducted by RAND Europe Consultancy
(Cambridge) at the request of the EPRS. The full study is available in Annex II. The comparative legal
analysis was conducted by Utrecht University at the request of the EPRS and it is available in Annex I. The
European Parliament's public consultation on robotics was requested by the Legal Affairs Committee and
conducted by the EPRS European Added Value Unit.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 11
The analysis of European added value is informed by the two expert studies specifically
commissioned by the EPRS: 'Socio-economic analysis of the EU common approach on liability
rules and insurance related to connected and autonomous vehicles' and 'Legal analysis of the EU
common approach on the liability rules and insurance related to connected and autonomous
vehicles', results of the European Parliament public consultation on robotics and artificial
intelligence, and also publicly available statistical data and publications.
2. EU law and policy context
2.1. Applicable EU law
The appropriation of risks in relation to the use of motor vehicles is currently regulated through
two main EU legislative acts governing liability: the Motor Insurance Directive (2009/103/EC)
and the Product Liability Directive (85/374/EEC). This system is based on the highly harmonised
EU framework for liability of a producer of a defective product and very limited EU framework
(mainly establishing third-party liability insurance cover and procedure for claims resolution) on
civil liability for victims of road traffic accidents. When it comes to the substantive rules relating
to road traffic accidents, national rules on liability and the calculation of damages for victims
apply.
Table 2 – Main EU legal and policy instruments on civil liability relating to motor vehicles
EU law
Product Liability Directive (PLD) 85/374/EEC
19
Motor Insurance Directive (MID) 2009/103/EC
20
EU policy instruments
2017 European Parliament resolution on civil law rules on robotics
21
2016 Declaration of Amsterdam – Cooperation in the field of connected and
automated driving
22
2017 Letter of Intent on the testing and large scale demonstration of Connected
and Automated Driving
23
Other action at EU level
2017 European Commission public consultation on PLD
2017 European Commission public consultation on MID
24
Source: Information compiled by the author.
19
Council Directive 85/374/EEC of 25 July 1985 on the approximation of the laws, regulations and
administrative provisions of the Member States concerning liability for defective products, OJ L 210,
7.8.1985.
20
Directive 2009/103/EC of the European Parliament and of the Council of 16 September 2009 relating to
insurance against civil liability in respect of the use of motor vehicles, and the enforcement of the obligation
to insure against such liability (Text with EEA relevance), OJ L 263, 7.10.2009.
21
Resolution of 16 February 2017 on civil law rules on robotics, European Parliament.
22
Declaration of Amsterdam – Cooperation in the field of connected and automated driving, 15-16 April
2016.
23
Letter of intent on the testing and large scale demonstrations of connected and automated driving (CAD),
23 March 2017.
24
REFIT review of the Motor Insurance Directive; Public consultation on REFIT review of Directive
2009/103/EC on motor insurance.

European Added Value Assessment
PE 615.635 12
The Product Liability Directive (PLD) establishes a harmonised EU framework for the liability
regime for producers that, inter alia, is applicable to car manufacturers.
25
The PLD, as interpreted
by the Court of Justice of the European Union, sets out rules relating to the liability of producers
and the rights of consumers. This framework is based on a no-fault liability regime.
26
This means
that the producer of a defective product must compensate for personal injuries and damage to
private property irrespective of the negligence of an individual. The rights of consumers to claim
damages under the provisions of the PLD cannot be limited by the contractual clauses included
by the producer.
27
The PLD however provides a limited list of derogations in Article 7 that waives
liability of the producer. National rules on civil liability still apply, for example on the
determination on non-material damages or definition of causality.
The Motor Insurance Directive (MID) provides a less harmonised framework for motor vehicles.
The substantive rules on liability for damages resulting from motor vehicle accidents are not
harmonised at EU level and thus individually regulated by the Member States. The various
Member States have adopted differing liability systems, for example, the Netherlands has a semi-
strict liability system, France has very strict liability system (no fault regime), and the United
Kingdom system has a 'no strict liability' regime based on negligence rules. The MID prescribes
only minimum third party liability insurance cover in EU Member States.
These two legislative acts cover very different areas, provide different degrees of harmonisation
on civil liability rules and also have different purposes. Indeed the purpose of the PLD, which
applies to all EU products, is to facilitate competition and the free movement of goods within the
internal market and protect consumer against damage caused by a defective product. The
purpose of the MID, meanwhile, is to facilitate the free movement of people through EU by
providing a mechanism for the protection of road traffic accident victims.
2.2. EU programming documents relating to AVs
The digitalisation of transport was one of the key priorities of the Estonia and Netherlands
Council presidencies in 2017. Most recently, on 5 December 2017, the Council adopted
conclusions calling on the Commission 'to work together with Member States and stakeholders,
including at international level, to analyse the liability regime in the context of the digitalisation
of transport, addressing especially data quality, data integrity and traffic of connected and
automated vehicles, vessels and drones'.
28
The 2016 Declaration of Amsterdam on cooperation in the field of connected and automated
driving and the 2017 Letter of intent on the testing and large scale demonstration of connected
and automated driving,
29
signed at EU Member State ministerial level, call for closer cooperation
25
For a review of the application in the Member States, see the Fourth report on the application of Council
Directive 85/374/EEC of 25 July 1985 on the approximation of the laws, regulations and administrative
provisions of the Member States concerning liability for defective products amended by Directive
1999/34/EC of the European Parliament and of the Council of 10 May 1999.
26
Article 1, PLD.
27
Preamble and Article 13, PLD.
28
Council conclusions of 5 December 2017 on the digitalisation of transport.
29
Letter of intent on the testing and large scale demonstrations of connected and automated driving (CAD),
March 2017.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 13
and exchange of information among Member States on actions leading to the testing and
deployment of AVs.
Moreover, in 2017 the European Parliament adopted a resolution on civil law aspects of robotics
and artificial intelligence (AI).
30
The European Commission's 2015 digital single market
strategy,
31
its 2016 communication on digitising European industry,
32
and its 2017 communication
on building a European data economy,
33
all address, in a more general context, the liability issues
relating to new technologies, the internet of things, and autonomous systems.
2.3. Position of the European Parliament
In the light of the rapid developments in the area of robotics and artificial intelligence, the
European Parliament Committee on Legal Affairs (JURI) set up a working group in 2015 on legal
questions relating to the development of robotics.
34
The aim set out in the working group mission
statement was 'to reflect on legal issues and especially to pave the way to the drafting of civil law
rules in connection with robotics and artificial intelligence'. The working group engaged
intensively with the topic of robotics and AI, consulted with experts and various stakeholders,
35
and as a final outcome drafted a report on civil law rules on robotics.
36
This latter provided a basis
for the European Parliament resolution adopted in February 2017 outlining its main framework
and vision on the topic of robotics and AI.
37
The resolution devotes considerable attention to issues of liability that, according to the EP,
should be analysed and addressed at Union level.
38
In the introduction and general principles
section Parliament calls for the development of civil liability rules that reflect European and
universal values,
39
discusses in detail challenges arising from the general liability issues
associated with autonomous robots and AI, questions the sufficiency of the current liability
framework, and underlines the limits in the substantive (i.e. persons that can be held liable) and
material scope (i.e. only damages resulting from manufacturing defect) of the current legislative
framework. The resolution calls on the European Commission to submit a proposal for a directive
on civil law rules on robotics on the basis of Article 114 of the Treaty on the Functioning of the
European Union (TFEU). More specifically, as regards liability issues, the Commission is urged
to submit a legislative proposal, accompanied by non-legislative instruments, to address legal
issues relating to the development and use of robotics and artificial intelligence, including AVs.
40
30
Resolution of 16 February 2017 on civil law rules on robotics, European Parliament.
31
Communication on a digital single market strategy for Europe, COM(2015) 192, European Commission,
2015; see also the communication on the mid-term review of the digital single market strategy,
COM(2017) 228, European Commission, May 2017.
32
, Communication on digitising European industry reaping the full benefits of a digital single market,
COM(2016) 180, European Commission, April 2016.
33
Communication on building a European data economy, COM(2017) 9, January 2017.
34
The minutes of the working group on robotics and artificial intelligence meetings are available here:
http://www.europarl.europa.eu/committees/en/juri/subject-files.html?id=20150504CDT00301
35
See the proceedings of the working group.
36
Draft report with recommendations to the Commission on Civil Law Rules on Robotics, Rapporteur: Mady
Delvaux.
37
Resolution of 16 February 2017 on civil law rules on robotics, 2015/2103 (INL), European Parliament.
38
Resolution 2015/2103, Liability, para. 49.
39
Resolution 2015/2103, General Principles, Sections U and Y.
40
Resolution 2015/2103, Liability, para. 51.

European Added Value Assessment
PE 615.635 14
In developing a legislative instrument on civil liability and carrying out an impact assessment,
the Commission is called upon to consider the following elements:
- Limitations to liability. The type or the extent of the damages that may be recovered
and the forms of compensation offered to the aggravated party should not be restricted
or limited solely on the basis that the damage is caused by a non-human agent (para 52).
- System for determination of liability. In-depth analysis is necessary to determine
whether the EU should adopt the strict liability (no-fault) or the 'risk management'
approach (paras 53-55). Whatever system is preferred, 'liability should be proportional to
the actual level of instructions given to the robot and of its degree of autonomy' (para 56).
- Obligatory insurance scheme and guarantee fund. The European Parliament stresses
that compulsory insurance for robotics is a possible solution to the allocation of
responsibility for damages caused by autonomous robots (paras 57, 59a). This insurance
system could be supplemented by a guarantee fund to ensure compensation in cases of
damage caused by unidentified or uninsured subjects (paras 58, 59b-e).
The European Parliament has been working continuously on the issue of robotics and artificial
intelligence. Together with the adoption of the resolution, in February 2017 the European
Parliament's Legal Affairs Committee launched a public consultation on robotics and artificial
intelligence.
41
The aim of the consultation was to invite and involve all stakeholders, including
private individuals, to express their views on the subject. Following the results of the public
consultation, at the request of the Legal Affairs Committee, the European Parliamentary Research
Service is preparing an in-depth study on the cost of non-Europe for robotics and artificial
intelligence.
42
Robotics and AI will also be one of the topics debated during European Youth
Event in Strasbourg in spring 2018.
43
2.3.1 Results of the European Parliament's public consultation
The 2017 public consultation on the civil law rules on robotics covered, among other topics, issues
relating to the liability of autonomous vehicles. The main objective of the consultation was to
obtain views from wide a range of stakeholders on developments in the area of robotics and AI
in order to define further possible measures, both legislative and non-legislative.
44
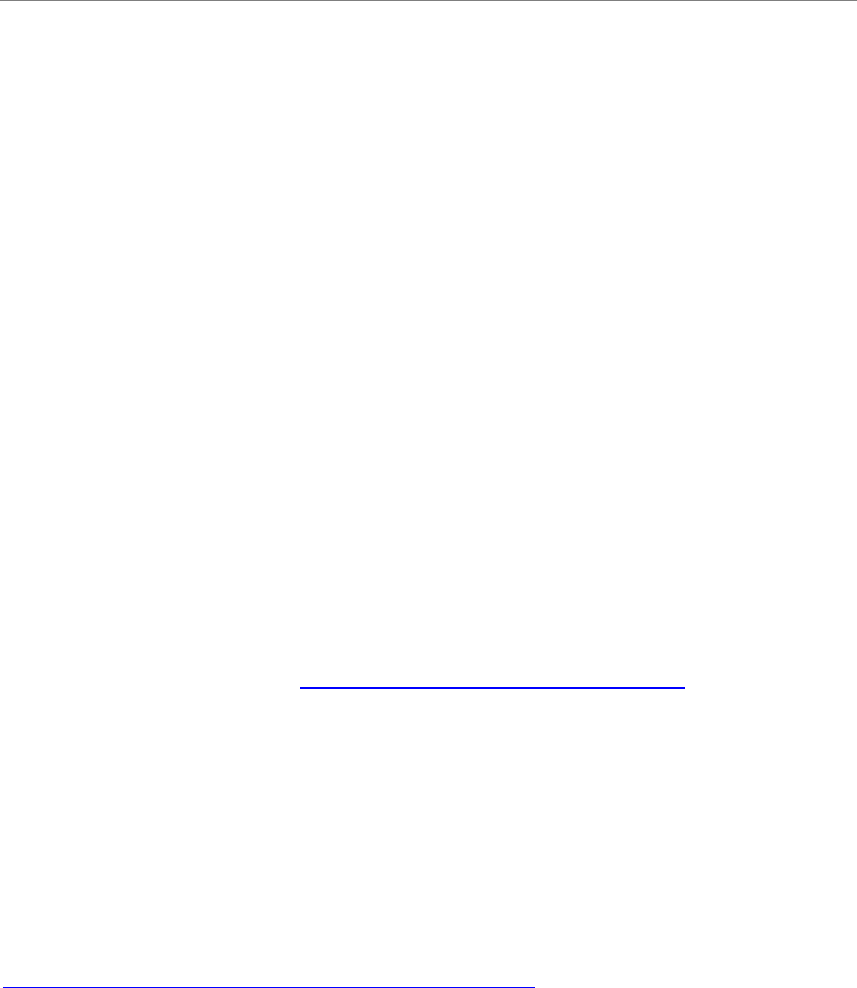
The results of the consultation showed that 74 % of respondents, in the context of robotics and
AI, felt concerned about liability issues. As the graph below indicates, in fact, liability was among
the top three concerns related to robotics and AI as indicated by the respondents.
One of the elements that emerged was the preference, among stakeholders, for action at EU level
as opposed to national level. Indeed, of those favouring a regulatory approach, an overwhelming
majority preferred action at EU or international level rather than action at Member State level.
The arguments supporting regulatory action at this wider level were, among others, the need to
protect EU values (especially data protection, privacy and ethics), to ensure the EU's global
competitiveness, to secure EU primacy as a standard setter in international fora, to avoid a 'race
to the bottom', and to promote fair competition within the internal market. Compared with the
41
The public consultation was prepared and scientifically coordinated by Tatjana Evas, European Added
Value Unit, EPRS, European Parliament.
42
The Cost of Non-Europe on Robotics and Artificial intelligence report will be published in 2018-2019.
43
European Youth Event, European Parliament.
44
The consultation was open from February to June 2017 and received almost 300 replies (259 from private
individuals, 37 companies, and 2 from public authorities or international organisations). An overview of the
aims and the results of the public consultation are available on the European Parliament website.
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 15
national level, respondents also considered the EU as more efficient, not only in legislating but
also in ensuring better enforcement of adopted regulation.
Figure 1 – Stakeholders' concerns about liability issues
Source: Data compiled by the author.
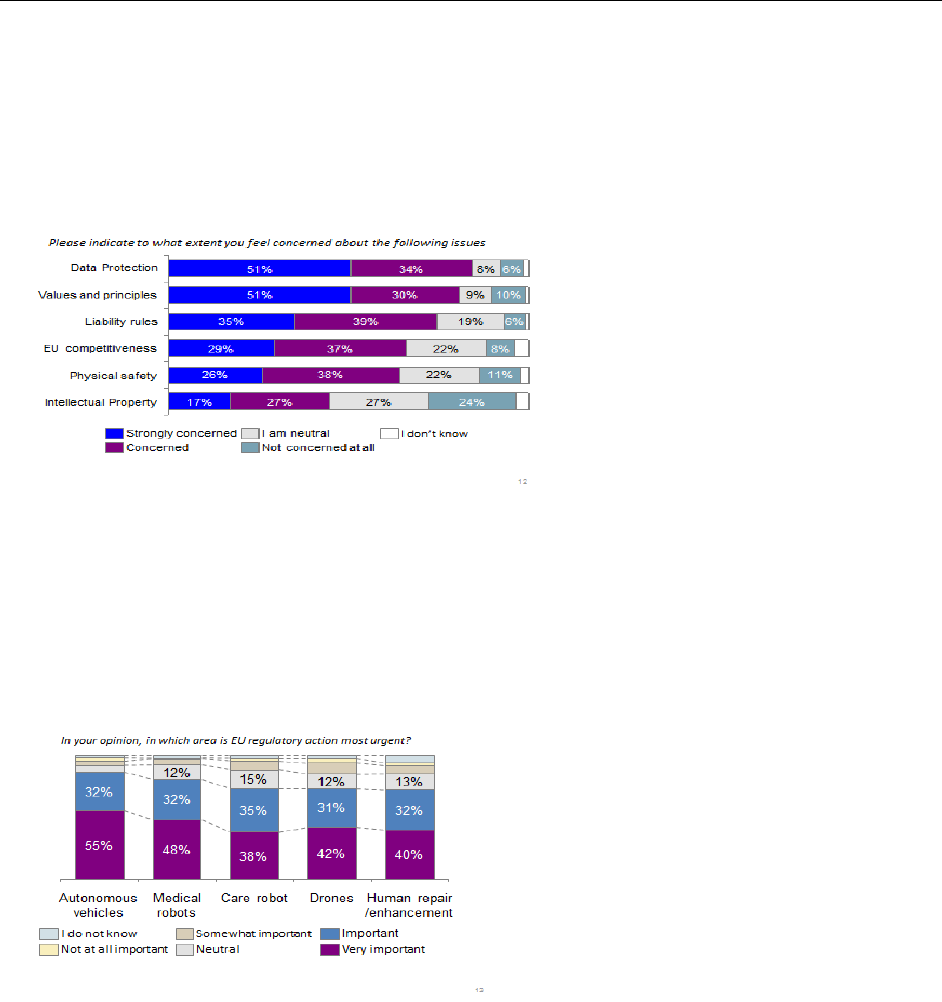
The stakeholders were asked which policy area would require, in their opinion, the most urgent
regulatory action, should EU action be considered. 87 % of respondents indicated that action in
the area of autonomous vehicles was a top regulatory priority.
Figure 2 – Stakeholders' opinions on most urgent regulatory action
Source: Data compiled by the author.
In conclusion, the European Parliament position on the liability issue, supported by the results of
the public consultation, suggests that liability issue should be addressed by at EU level as a matter
of priority. The current regulatory framework, as defined by PLD and MID, seems insufficient
and requires a review in terms of both substantive and material scope. This is why in its resolution
the European Parliament invited the European Commission to conduct an in-depth analysis of
possible policy options at EU level to address liability issues.
European Added Value Assessment
PE 615.635 16
2.4. Position of the European Commission
The European Commission (EC) is managing a wide range of initiatives, funding programmes
and expert groups on automated driving, coordinated by different directorates general (DGs).
45
The activities of the Commission relating to the deployment of AVs can be broadly summarised
as follows:
Table 3 – Main activities of the European Commission in relation to the deployment of AVs
46
1. Programming
documents
2016 European strategy on C-ITS, a milestone towards
cooperative, connected and automated driving
47
2. Review of existing
legislation
REFIT review of Directive 2009/103/EC relating to motor
insurance third party liability
48
including a public
consultation
Evaluation of Directive 85/374/EEC concerning liability for
defective products
49
including a public consultation
3. Studies/initiatives
related to the future
deployment of AVs
GEAR 2030 High Level Group (which concluded its activities
in October 2017)
C-ITS Platform Phase I and Phase II
C-ROADS
4. Funding
programmes
Horizon 2020 – dedicated calls to tender on automated road
transport and internet of things
Source: Information compiled by the author.
2.4.1 Review of existing legislation
In 2017 the European Commission started the evaluation of the PLD and the REFIT of the MID.
50
According to the 2017 inception impact assessment of the MID, the evaluation pillar of the
REFIT will focus, among other things, on the 'suitability of the directive in the light of
technological developments (electric bicycles, Segways, semi-automated and automated vehicles)
and on whether the liability system it provides will suit future needs'.
51
In the context of the public
consultation carried out from July to October 2017,
52
questions 33 and 34 (Q33 and Q34) were
particularly relevant in relation to liability issues linked to the deployment of AVs.
45
For an up-to-date overview of European Commission initiatives see for instance the Automated Driving
Roadmap, European Technology Platform, 2017.
46
This table only presents measures and activities that cover or mention the issue of liability or regulatory
cooperation among Member States. Projects and activities relating, for example, to road safety, technical
standards or the environment are not included.
47
Communication on A European strategy on cooperative intelligent transport systems, a milestone towards
cooperative, connected and automated mobility, COM(2016)766, November 2016.
48
REFIT review of Directive 2009/103/EC relating to motor insurance third party liability.
49
See the Roadmap for evaluation.
50
REFIT is shorthand for the European Commission's Regulatory Fitness and Performance Programme.
51
Inception Impact Assessment, Ares(2017)3714481, REFIT review of Directive 2009/103/EC relating to
motor insurance third party liability.
52
Public consultation on the REFIT review of Directive 2009/103/EC on motor insurance.
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 17
'Question 33: Should autonomous vehicles continue be insured for liability to victims of accidents
the same way as vehicles with drivers?
Question 34: Should MID be clarified in any way to reflect the development of autonomous
vehicles? If so, please substantiate your answer and explain how.'
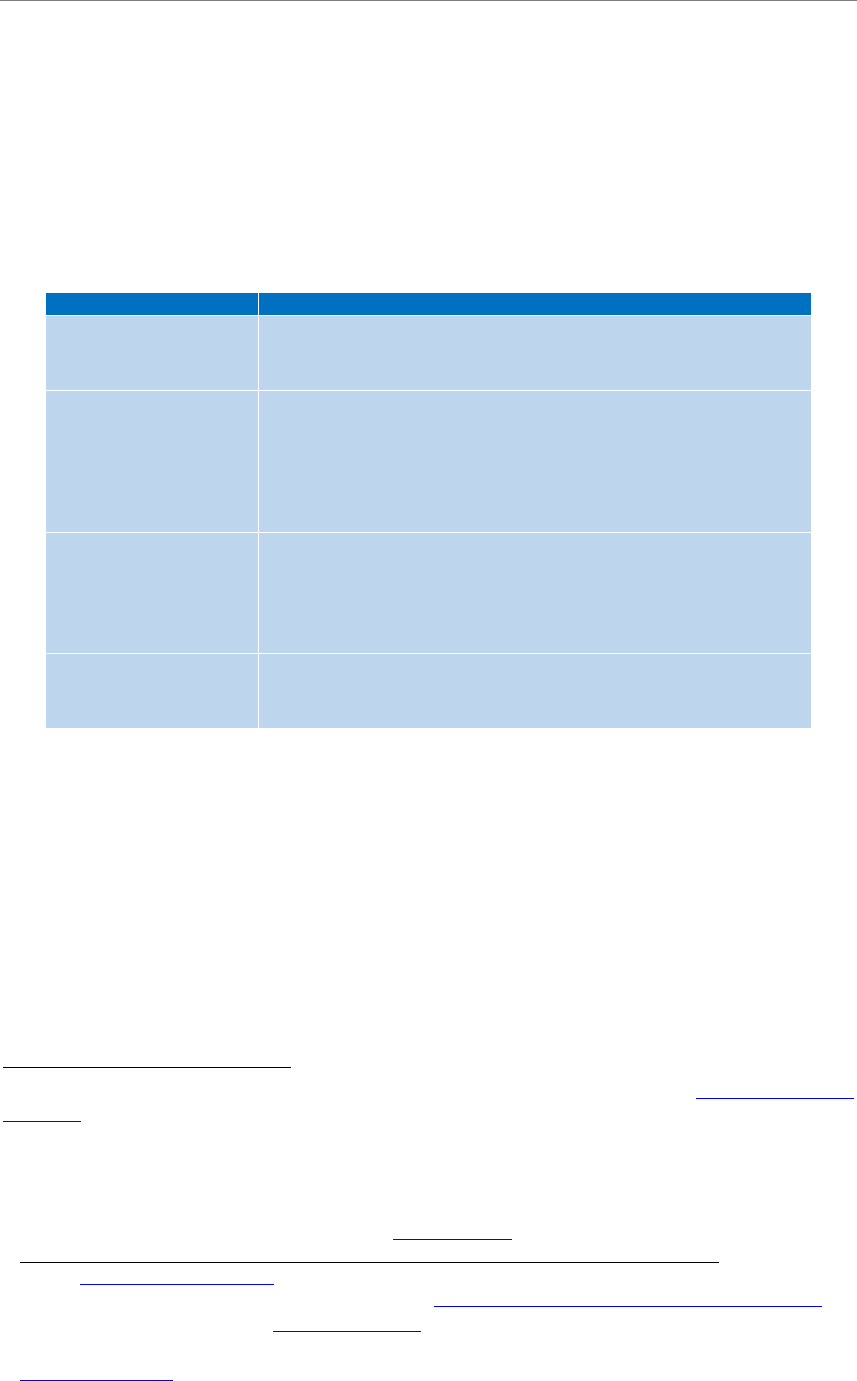
At the time of writing, in January 2018, the results of the public consultation, in the form of the
analytical report, have yet to be published. However an analysis of the replies submitted,
available on the web page of the consultation, reveals that 73 % of the respondents who answered
Q33
53
considered that AVs should continue to be insured for liability to victims in the same way
as vehicles with drivers. Considering however, that only 14.5 % of all respondents answered this
optional question, it could be argued that respondents found it difficult to answer.
Figure 3 – Overview of stakeholders' replies to Question 33
Source: Data compiled by the author.
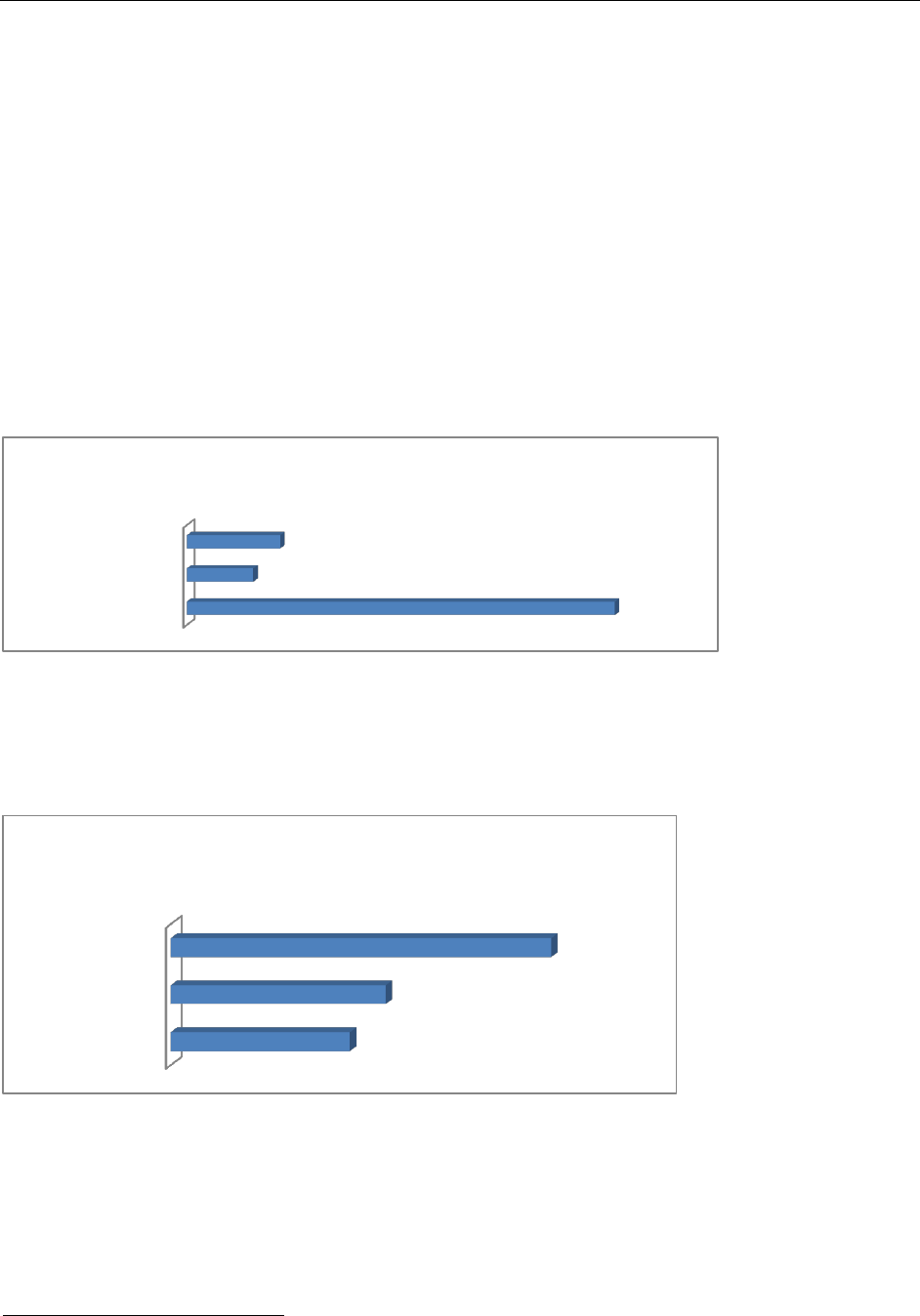
The replies to Q34, which asks more specifically whether and how MID should be clarified to
reflect the development of autonomous vehicles, leave respondents even more divided.
Figure 4 – Overview of stakeholders' replies to Question 34
Source: Data compiled by the author.
The results of the public consultation seem to suggest that further in-depth analysis on the topic
is necessary. It remains to be seen how the European Commission will interpret the results of the
public consultation and whether or not it will suggest any reviews of the MID in relation to AVs.
53
There were 504 answers to Q 33 out of a total of 3 478 replies submitted to the consultation.
Yes
No
Other answers
367
57
80
Q 33: Should autonomous vehicles continue be insured for liability to victims
of accidents the same way as vehicles with drivers?
Yes
No
Other answer
80
96
170
Q 34: Should the MID be clarified in any way to reflect the development
of autonomous vehicles? If so, please substantiate your answer and
explain how.

European Added Value Assessment
PE 615.635 18
In parallel to the REFIT of the MID, the European Commission is also conducting an evaluation
of the PLD.
54
According to the roadmap, one of the purposes of the evaluation is to 'assess the
coherence of the directive with other relevant EU actions and whether it still corresponds to the
stakeholders' need and has EU added value. The evaluation will also assess if the directive is fit-
for-purpose vis-à-vis the new technological developments such as the internet of things and
autonomous systems'.
55
The roadmap specifically refers, inter alia, to the 2017 European
Parliament resolution on civil law aspects of robotics and AI as one of the grounds for carrying
out the evaluation. In providing justification for the evaluation, the roadmap states the following
as regarding liability in context of new technological developments:
'Recently, liability issues are progressively being investigated notably within the
framework of the digital single market strategy (DSM). In the context of preparing the
free flow of data initiative, a key issue is to reflect whether Directive 85/374/EEC is fit
for purpose vis-à-vis new technological developments (i.e. software, Cloud, internet of
things (IoT), advanced robots and automated systems) and whether it covers cases of
malfunctioning apps and non-embedded software. Furthermore, issues have been raised
on whether the unintended, autonomous behaviour of an advanced robot could be
considered a defect and how should strict liability for damages be allocated between the
different participants in the internet of things or, in more general terms, in case of
connected objects relying on each other.'
56
As part of the evaluation process, at the beginning of 2017, the European Commission also
organised a public consultation.
57
The brief summary of the consultation results suggests that,
even now, with autonomous vehicles not yet en masse on public roads, 58 % of consumers and
45 % of producers consider that for products like autonomous vehicles the application of the
directive might be problematic or uncertain. It is interesting to note, however, that only 25 % of
producers consider that the directive needs to be adapted for innovative products such as
autonomous vehicles. This is in contrast to 54 % of consumers and 40 % of other respondents
(including public authorities and civil society) who consider adoption of the directive to be
necessary.
58
2.4.2 Studies on AVs
The European Commission has arranged a large number of initiatives and expert groups in
relation to the automotive sector and AVs, covering a wide range of topics connected with the
testing and roll-out of AVs. The main positions and conclusions arising from these AV-related
studies AVs, as specifically related to liability issues, are summarised in the table below:
54
2017 evaluation of the Directive 85/374/EEC concerning liability for defective products.
55
Roadmap for the 2017 evaluation of the Directive 85/374/EEC concerning liability for defective products.
56
Ibid.
57
The Public consultation on the rules on liability of the producer for damage caused by a defective product.
58
Brief factual summary on the results of the public consultation on the rules on producer liability for
damage caused by a defective product. The summary does not specifically mention autonomous vehicles
but refers for instance to 'products where software and applications from different sources can be installed
after purchase, products performing automated tasks based on algorithms, data analytics, self-learning
algorithms or products purchased as a bundle with related services'.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 19
Table 4 – Main studies related to liability issues for AVs by the European Commission
Year
Document
Main Conclusions
2017
GEAR 2030 HLG
Final Report
18/10/2017
'Regarding compensation of victims, GEAR 2030 HLG is of the
opinion that motor insurance and product liability directives are
sufficient at this stage, at least for systems expected by 2020.'
'There are diverging views as to whether it is necessary, or even
desirable, to harmonise more the different national liability regimes.'
'Therefore the European Commission will monitor the need to revise
the MID and PLD (e.g. definition of product/service, definition of
defect) as well as the need for additional EU legal instruments with
the future development of technologies.'
2016
GEAR 2030 HLG
Roadmap
For the current state of development of connected and autonomous
vehicles, the existing legal framework on liability and risk
appropriation is sufficient.
59
However, with increasing connectivity and automation of vehicles a
complete revision or shift in liability rules between the parties
involved (i.e. driver, manufacturer, software provider, etc.) might be
necessary.
60
2015
Business
Innovation
Observatory/
Study by PwC
commissioned by
DG GROW
'with the technology for assisted and autonomous driving
developing rapidly, uncertainty on liability is a growing concern.
[...] Without clarity, insurance companies will not know where they
can rightfully claim the damages and companies will not be able to
assess their liability.'
61
'By quickly developing a harmonised European legal framework
that addresses concerns on liability and self-driving functionality,
especially for semi-autonomous and fully autonomous vehicles,
Europe can gain a competitive edge over other regions where such
a framework is not yet in place (e.g. the USA).'
62
2015
C-ITS Final
Report
63
As long as the driver remains in the control of the vehicle no changes
concerning liability are necessary.
64
However, considering the 'trends towards higher levels of
connectivity and automation, where information provided via C-ITS
may trigger subsequent action from the vehicle', the final C-ITS
report recommended re-evaluating the question of liability for these
cases in the second phase of the C-ITS platform.
Source: Information compiled by the author
The dominant view taken by the expert studies commissioned by the European Commission from
2015 to the present day is that the current regulatory framework will suffice at least until 2020
when mass roll-out of AVs is expected. Future technological developments might require
59
'It is anticipated that at least in the short run the legal position for liability in relation to features on vehicles
which incorporate higher levels of automation would not be significantly different to those presently
assisting the driver. In case of accident, each of the parties involved (manufacturer, driver, etc.) may be
found to be civilly (or in some cases criminally) liable to a greater or lesser extent depending on the exact
circumstances of the situation.' GEAR 2030 Discussion Paper, Roadmap on Highly Automated Vehicles, p.8.
60
Ibid.
61
Internet of Things, Connected Cars, Case study 43, European Commission, Business Innovation
Observatory, 2015, p. 11.
62
Internet of Things, Connected Cars, p. 14.
63
C-ITS stands for Cooperative Intelligent Transport Systems. On the platform see information provided on
the Commission website.
64
Internet of Things, Connected Cars, p. 13., 'the driver always remains in control of the vehicle, and
therefore there are no changes concerning liability compared to the current situation and the current
amendment to the Vienna Convention (Amendment Article 8, paragraph 5) will be sufficient'.

European Added Value Assessment
PE 615.635 20
adjustments to the current system but this is as yet uncertain and thus would not require
regulatory intervention at this stage. In this context, the scope and options for future possible
adjustments have not yet been fully analysed in depth by the Commission. As the October 2017
GEAR 2030 report suggests, the Commission will monitor developments relating to the
application of MID and PLD to the roll-out of AVs to the market and leave resolution of the
possible problems and disputes to the courts and other bodies on a case by case basis.
This position stands in contrast to the position of the European Parliament, which is calling for a
pro-active in-depth analysis of the possible regulatory response before mass roll-out of AVs. The
results of the European Parliament public consultation, especially relating to the PLD suggests
that consumers also feel a need for adjustments to the current system. It remains to be seen what
action the European Commission will take on the liability issues associated with AVs in the light
of the results of the ongoing REFIT of the MID and evaluation of the PLD.
3. Limitations of and gaps in the current framework
This section describes in more detail the limitations of and gaps in the current EU legislative
framework that could potentially have a significant impact when AVs take to public roads en
masse.
The current EU system of appropriation of risks related to motor vehicles generally works well.
Based on the review of the PLD and MID
65
as well as the public consultations carried out by the
European Commission, the majority of stakeholders believe that the current EU liability
framework provides a working system that ensures an appropriate balance of interests and
responsibilities of all parties involved.
66
The results of the European Commission's 2017 public
consultation on the PLD indicate that 82.5 % of respondents representing organisations believe
that the PLD provides for a fair balance between the interests of producers and those of the
consumers.
67
Private individuals and other respondents seem however to be less confident, as in
total (all replies considered) only 68 % believe that the directive provides for a fair balance
between the interests of producers and those of consumers.
68
Respondents also consider that the,
roll-out and in particular the mass penetration of AVs into the market would likely have a
significant effect on the existing system of appropriation of risks relating to motor vehicles.
The current liability system is based on the understanding that there are two main types of risk
relating to the operation of motor vehicles: first, the failure of the hardware, i.e. it is the product
that triggers product liability, and second, the action of (and/or damage to) a driver, which
triggers liability under national traffic laws and is also covered by the MID. Table 5 below
summarises the new types of risk that could be generated by the introduction of AVs to the
market. Considering the nature of AVs as products characterised by increased complexity of
65
Directive 2009/103/EC of the European Parliament and of the Council of 16 September 2009 relating to
insurance against civil liability in respect of the use of motor vehicles, and the enforcement of the obligation
to insure against such liability.
66
See the European Commission's 2017 public consultation on the REFIT review of Directive 2009/103/EC
on motor insurance; and the summary of the European Commission's 2017 public consultation on the rules
on liability of the producer for damage caused by a defective product.
67
See replies to question 13, European Commission, Brief factual summary on the results of the public
consultation on the rules on producer liability for damage caused by a defective product, p. 24.
68
Ibid, p. 3.
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 21
hardware and software as well as crucial reliance on connectivity and networks, at least six main
risks affecting liability can be identified. The existing risks, i.e. failure of hardware and liability
based on personal conduct of a driver will be substantially impacted. This could potentially lead
to a shift in risk distribution between for example consumer and producer. The new risks that
would emerge with the roll-out of AVs are currently not specifically covered by the EU liability
framework.
69
Thus, the current set of rules would have to be interpreted in such a way as to
account for the 'new risks'. This legal ambiguity could lead to increase in litigation and possible
divergent interpretation in various Member States. Finally, the current rules of evidence, i.e. the
rules establishing fault and therefore liability would need to be adjusted, possibly through the
introduction of legislation on detection technology, i.e. event data recorders.
Table 5 – Main risks in the current system versus those in a mobility system based on AVs
Current
system of
mobility
System of
mobility
based on AVs
Current
legislative
coverage
Existing gaps and
limitations
Main impacts relating to the use of
AVs
Existing risks
Hardware
failure
Hardware
failure (but
with
additional
components,
such as
sensor
failure)
PLD
Concept and scope
of defectiveness
Scope of available
defences
If driver or
operator suffers
damage him or
herself as a result
of a sensor being
faulty because of
'wear and tear'
there is no
protection under
the PLD or the
MID.
If current rules remain there will
be de facto a major shift in liability
transfer, and thus the current
balance will be upset, most likely
to the disadvantage of the
consumer.
It will create legal uncertainty and
potential increased litigation.
Action of a
driver
Action of a
driver
MID
National traffic
rules
Insured risk of
motor liability
insurance is
assessed differently
within the EU.
Member States with
a risk-based
liability regime
exclude or limit the
protection of the
owner/ possessor/
keeper of vehicles,
if they suffer
damage
themselves.
Liability based on the personal
fault of the driver will decrease
while liability based on the failure
of the technology will increase
New risks
Software
failure
Issues/risks that currently are not
explicitly or sufficiently clearly
regulated by EU law
New risks are currently not (or not
fully) covered by existing EU
legislation. If these are not
addressed it will lead to increased
legal uncertainty (divergent
Network
failure
Hacking/
cybercrime
69
Though some risks, for example those relating to data protection, are covered by EU legislation, see
discussion below in Section 3.2.

European Added Value Assessment
PE 615.635 22
Programming
choice
externality
interpretations of current rules in
various jurisdictions).
Higher volume and costs of
litigation
Procedural rules
Evidence
Evidence
National traffic liability rules/ MID
Claimants will potentially
increasingly encounter problems
with delivering proof of defects,
where without in-built associated
detection technology (such as an
event data recorder) it may be
difficult to prove the defect.
Source: Information compiled by the author.
3.1. Existing risks: shift in liability
The roll-out of autonomous vehicles calls for a fitness check of the current regulatory framework
on liability in order to understand (i) how risks would be allocated among the parties involved
and (ii) whether current balance between the parties would be preserved. The key question is
whether the process of digitalisation in the automotive industry, in particularly the roll-out and
the mass adoption of AVs, would impact the current balance between parties in risk
appropriation. If roll-out of AVs would result in liability transfer between the parties, the
question is whether and to what extent an adjustment and/or introduction of a new regulation
would be necessary. AVs require special regulatory attention and a review of the current
framework not only because of their significant economic and societal value but also because AVs
are a disruptive technology that have the potential to change what is now our conventional
understandings of a product, mobility, ownership and security. In other words, roll-out and mass
adoption of AVs are not another upgrade or improvement of the traditional product of the
automotive industry, a vehicle, but rather a qualitatively new product. This new product is
technologically sophisticated with many components, software, hardware and algorithms where,
among other things, the line between product and service becomes increasingly blurred.
3.1.1 Product Liability Directive and Motor Insurance Directive
70
The PLD is generally a fair instrument for balancing the distribution of risks between producers
and consumers of products. However, if applied to the mobility system based on AVs, existing
gaps and limitations could potentially limit the scope and effectiveness of the PLD and affect the
existing balance between the parties.
71
The three main groups of issues are the following:
First, the PLD has limited substantive scope and covers only liability of producers for
defective products. The concept of 'defectiveness' is narrowly defined and difficult to
establish for technically complex products such as AVs. As it stands now, damage arising
for example from a vehicle's wear and tear, bad repair, the way vehicle has been used,
the road situation, or weather conditions will be not covered by the PLD. Developers,
producers, component makers, importers, distributors, and car-dealers could rely on a
number of defences provided by the PLD to minimise liability, which in relation to highly
technological products, could provide a wide safety net for producers to the
disadvantage of consumers. For this reason, several parties (including rental companies
70
For a comprehensive, detailed overview of the gaps in and limitations of the current framework see the
study by Engelhard and Bruin in Annex I.
71
Ibid.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 23
and other service providers, pure developers of the operating technology and testing
companies) will not incur risk-based liability for defectiveness, but only fault-based
liability. The definition of product also remains an open question, more specifically
whether software is a product or not.
Second, the cost of scientifically unknown risks will be shouldered by the injured
party.
Third, the high-tech nature of AVs combined with the broad provisions of the PLD on
defences, in particular in relation to the concept of 'reasonableness' may overburden
national courts. National courts interpreting and applying the PLD to disputes involving
AVs will be called upon to settle very complex technological issues.
Table 6 – Summary of the main gaps under the current PLD regulation that could potentially
have a negative effect on consumers in the light of the introduction of AVs
72
- [substantive scope] Several parties responsible for the design and/or manufacture of autonomous
vehicles are not covered by the risk-based liability imposed by the PLD.
- [material scope]
o The consumer must show that the product was defective at the moment a vehicle left the
factory, this is technically difficult and also involves a normative judgement on the
required safety standard for the new technology.
o Producers have a wide margin of possibilities to shift costs of scientifically unknown risks
through 'compliance risk' and 'development risk' defences to the consumer.
o The PLD does not cover damage to the autonomous vehicle itself and it is limited with
regard to property damage.
o The PLD does not cover damages resulting from 'wear and tear' or other parties'
interventions or failure of telecom networks.
Source: Information compiled by the author.
In conclusion, application of the PLD to autonomous vehicles will provide a certain degree of
protection. However, there are a number of legal and factual issues that, if not addressed, could
potentially lead to decreased scope of protection and increased costs for consumers as well as
increased legal uncertainty for all parties involved. Specifically, these issues include: the limited
reach and meaning of product liability, and the limited list of liable persons and evidentiary
burdens currently provided under the PLD.
Another legal mechanism to claim compensation for damages caused by motor vehicles is to rely
on traffic liability rules. Substantive traffic liability rules and levels of compensation fall within
the competence of the Member States. National rules are divergent and include fault-based
systems, mixed, and strict-liability systems (no fault). At EU level the MID regulates procedural,
adjunct issues relating to motor insurance policy. For example, importantly, it covers the
obligation for all EU vehicles to hold third-party liability insurance and establishes the
mechanisms for the simplified settlement of claims. AVs will fall under the definition of a vehicle
currently included in Article 1 of the MID and, thus, all damages to persons others than the driver
or user, keeper or owner of the vehicle will be covered by mandatory insurance as provided by
the MID, subject to the limitation provided by the MID. Currently, the national systems are based
on the assumption that the driver is in the control of the operation of the vehicle. In the fault-
based systems in particular, the link between fault of the driver and the accident is crucial to
72
The summary is based on the analysis provided by Engelhard and Bruin see Annex I.

European Added Value Assessment
PE 615.635 24
establish the right to compensation. The introduction of AVs assumes that a human driver will
be fully replaced by technology. Therefore the 'fault' of the driver becomes a notion that needs to
be reconsidered and or adjusted accordingly. Adjustment of the risk-based system would be
necessary, specifically in relation to the concept of driver-victim.
Table 7 – Summary of the main gaps under current MID and national traffic liability rules
73
- [substantive scope]
o Traffic liability rules are not harmonised at EU level. Traffic liability
rules at national level diverge and thus insured risk of motor liability
insurance is assessed differently across the EU.
o The MID provides for mandatory liability insurance to cover
damages to other traffic members but not to the driver or user,
keeper or owner of the vehicle itself.
- [material scope]
o Member States with fault-based liability systems – interpretation of
the concept and legal test for 'fault'
o Member States with risk-based liability systems – many Member
States systems exclude the driver or user, keeper or owner of the
vehicle itself; in some systems property damage is not or not fully
protected; legal tests to avoid strict liability as well as assessment
and/or calculation of the damage greatly differ among Member
States.
Source: Information compiled by the author.
All in all, as the analysis by Engelhard and Bruin suggests, if the current framework is not
reviewed in the light of special features relating to AVs as a product, application of the PLD to
AVs will have a significant negative impact on consumer protection. Thus, while the current
system of risk allocation would in principle be able to deal with the introduction of AVs, there
would be a shift in the current balance between the parties involved. Application of the current
EU liability framework to the roll-out and adoption of AVs highlights a number of existing gaps
and shortcomings that could potentially disturb the current balance in risk allocation. Both
industry and consumers need legal clarity on whether the current liability system is to be
maintained or regulatory changes are to be introduced.
3.2. New risks not explicitly addressed by current EU legislation on
motor vehicles
The current EU legal framework applicable to motor vehicles is, in principle, able to settle liability
and insurance issues. However, as was argued in the previous section, the application of the
existing rules to AVs will likely shift the existing balance in liability distribution between
consumers and producers, further accentuate existing gaps and potentially contribute to legal
and administrative costs arising from uncertainty. If the current EU framework is not adjusted,
in addition to the existing gaps in the current EU legal framework, the introduction of AVs will
contribute to the emergence of new gaps and legal grey areas. This is because the current legal
framework was not designed to deal with the liability issues of AVs, which are technologically
complex and stand distinctly apart from the motor vehicles currently on the roads.
73
Summary based on the analysis provided by Engelhard and Bruin, see Annex I.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 25
Four main categories of risk relating to the liability issues associated with AVs are likely to
emerge or become significantly more prominent with the mass roll-out and use of the AV. These
new risks include:
(1) risks relating to the failure of the operating software that enables the AVs to
function,
(2) risks relating to network failures,
(3) risks relating to hacking and cybercrime, and
(4) risks/externalities relating to programming choice.
These four issues are not at all or not sufficiently addressed under the current PLD or MID
framework.
1. Risks relating to software failure
This set of issues concerns situations where damage results from a failure in the AV's operating
software. The legal concerns relating to software failure in AVs are connected with two main
issues: first, when and under what conditions the software producer (rather than the car
producer) could bear the cost; and second, under what conditions failure of the software can be
considered within the scope of the PLD's 'defectiveness' standard. Under the PLD, the legal
question as to whether the software is a product or not is not settled. If the software could be
considered a product, then the questions raised would concern:
(a) under what conditions software could be considered 'defective' within the meaning of the
PLD, and what would be the scope of 'reasonable expectation' and 'development risk' defences;
and
(b) against which party the AV user should direct liability claims, i.e. the car producer or the
software producer.
Under the current PLD framework – provided the software is considered a product – the AV
driver or operator's right to compensation will depend on the reasons for the software failure.
The risks relating to the operating software are covered by the PLD only if those risks could have
been scientifically discovered before the AV's roll-out from the factory. Risks discovered or
emerging after the time of production are not covered. The possible right of compensation under
traffic liability rules for damages caused by software failure will depend on national traffic
liability laws and, as it stands now, will differ widely among Member States.
2. Risks relating to network failure
This set of risks relates to the situation where damage occurs because of network failures. AVs
will be heavily dependent on the network. Therefore, the central question is who and under what
conditions would be liable for AV inability to obtain data or communicate with other traffic
participants owing to network problems. Here, besides the AV user and car producer, a network
provider could arguably potentially be a liable party.
The attribution of risks for network failure under the PLD will ultimately depend on whether the
vehicle's network connection is a part of the package offered by the producer or not. If being
connected is part of the package provided by the producer, then the car manufacturer is liable
under the PLD for network problems, subject to the limitations and defences available under the
PLD. As in other cases relating to proof of defects under the PLD, the reasonable expectation test
and other defences are for the courts to apply in order to decide on the outcome. For the AV
producer to be liable for the software or network failure, it must be proven that the vehicle was

European Added Value Assessment
PE 615.635 26
already 'defective' at the time it left the production line. This proof of 'defectiveness', under the
current PLD is already difficult for the standard hardware failures of motor vehicles currently on
the roads, but will be even more difficult and uncertain for the software or network failures of
AVs. The right to compensation under national traffic liability laws for damages caused by the
network failure will again differ greatly among Member States. For example, under Swedish law
all individuals involved will be entitled to compensation for damages caused by the network
failure while in many risk-based countries the victim-driver/operator will not receive equal
protection compared with other vehicles involved.
3. Hacking and cybercrime
Considering the nature of AVs, hacking as well as issues relating to data and the protection of
privacy, will become significant new risks that are not yet covered by legislation specific to motor
vehicles.
74
Similarly to the risks emanating from software and network failures, the AV producer
could be liable for the damages resulting from a third party hacking the software of the vehicle if
defects in the AV at the time of production could be proven. The technology used by the producer
will have to be robust enough to protect the user of the AV against hacking attacks and malware.
Product defects would be very difficult to prove. Moreover, it would be even more difficult to
attribute liability if all necessary software was installed but cybercrime nevertheless occurred.
The PLD seems to provide a very limited and uncertain avenue for compensation claims.
General civil liability rules in cases of hacking and other cybercrimes are not harmonised in the
EU. Producers of AVs, in their capacity as controllers of personal data, can in principle be held
liable under the Data Protection Directive (DPD) and the new General Regulation on Data
Protection (GDPR). This is however subject to number of limitations. Producers can be held liable
only if they fail to take appropriate measures to protect data from being hacked or if they infringe
other obligations under the DPD or GDPR. However, it is not clear whether and to what extent
producers of AVs can be held liable if they are not a controller of a processor of data within the
meaning of the DPD or GDPR. Furthermore, the issue of whether the operator, or owner or keeper
of an AV could be held liable for the damage resulting from his or her own failure to install or
update software would be determined by national laws, which currently provide varying
responses.
4. Programming choice
This set of risks concerns liability for programming choices causing damages. The central
question here is when and under what conditions the producer of the AV could be held liable for
programming choices. Can programming choice be considered a 'design defect', thus making a
car manufacturer liable for a defective product? Furthermore, how broadly or narrowly should
the design risk defence be interpreted by courts as specifically applies to the injuries suffered by
third parties as a result of AV programming choices. As in the previously discussed cases, the
current PLD framework is not specifically designed to address those complex legal issues. Under
current PLD framework, the AV producer would be liable for damages resulting from software,
network and programming failures only for product defects that could be attributed to the
production process. Malfunctioning of the software or network as a result of 'wear and tear' or
malfunctioning of the software or network as a result of actions by other parties (hacking, bad
74
However, as will be explained below, the Data Protection Directive (DPD) and the General Regulation on
Data Protection (GDPR) cover issues relating to data and privacy.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 27
repair, etc.) and resulting damages caused by the AV are not within the scope of the liability
covered by the PLD.
To conclude, if not specifically addressed by the legislator, the current PLD framework would
result in many uncertainties relating to the new groups of risks identified above. While prima facie
not totally excluded from the scope of the PLD, it would in practice be likely to be extremely
difficult if not impossible for these risks to be covered by the PLD. As has been convincingly
argued by Engelhard and Bruin 'the cost of risks that are not consequential to the production
itself and the cost of scientifically unknown risks will be borne by the injured parties (and by their
social and private insurance carriers). This may not be perceived as a secure or fair system and
might reduce consumers' confidence in autonomous vehicles'.
75
The MID framework and
national traffic laws also present limitations and difficulties for both existing and new risks. As
substantive traffic liability rules are not harmonised at EU level, there are many national
differences, which in fact mean that EU citizens are protected differently in different Member
States. Risk-based national systems seem to be better suited to meeting the challenges of the AV,
however, they are also limited by a number of considerations, such as for example the scope of
compensation for damages caused to property or driver-victim.
3.3. Procedure and standards for establishing liability
In addition to the existing and new risks that would emerge as a result of mass use of the AV,
issues relating to the procedure and standards for establishing liability would also need to be
adjusted. Technically complex causal links leading to damages would significantly increase the
evidentiary burden on the injured party and may impede recovery of the damages. In this context,
there are strong arguments from the industry and insurance companies to introduce tracing
technology (TT) that may help to establish the reasons for accidents and thus assign liability. As
it stands now, it is up to each Member State to determine whether AVs' tracing data can be used
as evidence for establishing liability. Furthermore, issues relating to AV-TT data collection, usage
and storage need to be carefully assessed under the GDPR, to establish whether the current EU
framework is sufficient for AV-TT technologies.
76
4. EU policy response to current gaps and limitations
Based on the analysis above, the EU policy response to the roll-out and introduction of AVs in
terms of liability rules should therefore address the following sets of issues:
first, limitations and gaps relating to the current framework and, more specifically, the
shift in liability between parties;
second, it should adjust the current framework or introduce new rules to cover new risks;
and
third, it should adjust or introduce new procedural rules allowing liability to be
established for damages involving or caused by AVs.
Before analysing the specific policy options that would be able to address those three sets of
issues, it is necessary to evaluate whether EU action is necessary and whether the policy action
recommended would meet subsidiarity and proportionality tests.
75
Annex I (Utrecht study), p. 36.
76
For a detailed analysis of problematic issues that may arise under the GDPR see Annex 1 of this report,
the Utrecht study, Chapter 4 'Hacking and privacy issues'.

European Added Value Assessment
PE 615.635 28
4.1. Need to take action or intervene at EU level
The nature of the AV as a product that transcends the borders of individual Member States
suggests that joint action at EU level is preferable to individual action by Member States. The EU
has a wide range of competences relating to motor vehicles. For example, Article 114 TFEU can
be used to adopt measures aimed at facilitating the free movement of motor vehicles in the
internal market by setting up harmonised standards designed to achieve common environmental
or safety objectives. EU action relating to civil liability for damages caused by AVs may be
justified and necessary for the following main reasons:
- to ensure the functioning of the internal market, in accordance with the relevant
provisions of the Treaties, by facilitating the free movement of goods and by establishing
common rules and procedures to facilitate the roll-out and mass penetration of AVs
(Articles 26 and 114 TFEU);
- to ensure a high level of consumer protection by adopting measures to secure the
economic interests of consumers and their right to information (Article 169 TFEU);
- to facilitate the competitiveness of the EU automotive industry and boost the EU's global
competitiveness by taking action to speed up the adjustment of the automotive industry
to the structural changes caused by the roll-out and mass deployment of AVs (Article 173
TFEU);
- to facilitate completion of the internal market by adopting measures to diminish legal
fragmentation.
Considering the economic potential of the sector and technological developments in the
automotive industry, there is increased pressure on regulators to adjust legislative and policy
frameworks to accommodate the new reality of autonomous vehicles. The current EU framework,
as discussed above, has a number of gaps and shortcomings. Member States are becoming
increasingly impatient and are taking individual measures to introduce new or amended
regulation at national level in relation to connected and autonomous vehicles, including on
liability issues.
77
While during the last two years a number of Member States have adopted policy
documents outlining national road maps applicable to autonomous vehicles, Germany was the
first EU country to introduce amendments to its current national legislation.
78
Commenting on
the adoption of national legislation, the German authorities stated that: 'The car industry needs
to know the legal requirements to proceed with their developments, so we didn't wait any longer
and proceeded with a new law to give guidance to the rest of the EU'.
79
There is therefore a clear tendency and push on all regulatory levels to develop a regulatory
approach to connected and autonomous vehicles. However, as is underlined in the OECD/ITF
report
80
there is little coordination among the several jurisdictions that are working on or
77
At least seven EU Member States, including Germany, Spain, Finland, France, the Netherlands, Sweden
and the United Kingdom, are now in the process of developing a regulatory framework for the testing and
use of autonomous vehicles. Meanwhile, at international level a review of the Vienna Convention is being
carried out in order to allow for the testing of autonomous vehicles on public roads.
78
Achtes Gesetz zur Änderung des Straßenverkehrsgesetzes from 16 June 2017 according to Article 1(c) it
will be reviewed in 2019: 'Das Bundesministerium für Verkehr und digitale Infrastruktur wird die
Anwendung der Regelungen in Artikel 1 des Gesetzes vom 16. Juni 2017 (BGBl. I S. 1648) nach Ablauf des
Jahres 2019 auf wissenschaftlicher Grundlage evaluieren'.
79
'German debates on automated driving legislation', 27 July 2017.
80
Automated and Autonomous Driving, Regulation under uncertainty, OECD, 2015.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 29
already have passed rules enabling the testing, licencing and operation of autonomous
technologies and vehicles. This could ultimately lead to unnecessary barriers to the development
and deployment of new technologies. To ensure that the EU is at the forefront of technological
developments in the industry and to avoid unnecessary obstacles resulting from diverse
regulatory approaches in various Member States, a review of legislation and action at EU level is
necessary.
81
In the light of the ongoing review of legislation at international and national levels in relation to
connected and autonomous vehicles, proactive policy initiatives on liability rules initiated by
the European Parliament and other EU institutions could potentially help to reduce costs and
complexity for developers. They could also facilitate trust among consumers in connected and
autonomous vehicles and thus facilitate innovation, technological development, competitiveness
and economic growth in the EU.
4.2. Subsidiarity and proportionality
Any EU action must respect the principles of subsidiarity and proportionality as established
under EU law. In general, the policy options considered below all meet the subsidiarity and
proportionality requirements, as the measures suggested do not go beyond what is necessary to
achieve the common objectives of ensuring the functioning the internal market and the free
movement of goods while at the same time securing a high level of consumer protection and
facilitating the competitiveness of the industry.
82
If actions are taken individually by Member
States to address existing gaps and shortcomings, this may entail a risk of creating obstacles to
the roll-out and use of AVs across the EU. Action at EU level is therefore justified. However, the
action taken by the EU must have a clear scope and coverage in accordance with the EU Treaties.
4.3. Policy options and their impact
There are four policy options that may be considered when addressing the current gaps and
uncertainties.
Policy option 1: status quo – no adaptations for AVs
This policy option presupposes no change. Therefore the gaps and shortcomings of the existing
system identified would be preserved. Intensive litigation could be expected to fill legal lacunae
by means of case law. This may lead to different interpretations in the various jurisdictions. If
legal doctrine on contested or not specifically regulated issues is established through
jurisprudence at EU level it could potentially reduce legal uncertainty. However, the settlement
of contested legal issues on a case-by-case basis through the courts rather than through action by
legislators is arguably not the most effective, efficient and sustainable response.
81
The spectrum of the regulatory review necessary is broad and includes not only issues already covered
by EU legislation (i.e. civil and contract law, insurance, consumer protection, safety, and technical and
environmental standards for motor vehicles) but also related fields such as telecommunications,
cybersecurity, privacy and data protection.
82
The policy options suggested provide only an initial outline. The subsidiarity and proportionality tests
must be applied in more depth and more detailed policy options considered.

European Added Value Assessment
PE 615.635 30
Table 8 – Policy option 1: baseline scenario
Policy option 1: baseline scenario
Scope
Maintaining status quo.
Action required
No legislative changes to the PLD or the MID
No need to introduce new EU legislation
Pros:
- On a procedural level, this option does not require any action by the
legislator.
Cons:
- All identified gaps and uncertainties in the current system will remain,
potentially with the introduction of AVs leading to (i) a weaker
position for consumers; (ii) uncertainties for courts; (iii) increased costs
of litigation; (iv) increasing differences between Member States'
legislation
- New risks will remain uncovered
- Issues relating to the determination of liability in the event of accidents
will not be addressed
Source: Information compiled by the author.
Policy option 2: reform of the PLD
This option would aim primarily to clarify the allocation of risks between manufacturers and
consumers. It would involve addressing such issues as: the definition of the product, the
definition of 'defect', the scope and limitation of available defences and the burden of proof. The
main focus of this legislative intervention would be to ensure fair protection and compensation
for damages resulting from AVs by enlarging the substantive and material scope of the PLD. This
policy option would be difficult given that PLD is a directive that applies to all defective goods.
Thus, it would therefore be extremely difficult to amend the directive so as to address existing
gaps and limitations relating to AVs while also maintaining the directive's necessary flexibility
as a general regulatory framework for all defective products. Also it is questionable from a legal-
technical point of view to what extent it is feasible to cover all new risks by means of amendments
to the PLD.
Table 9 – Policy option 2: reform of Product Liability Directive
Policy option 2: reform of the Product Liability Directive
Scope
- Substantive revision of the substantive scope of the PLD to account for
existing gaps and cover new risks, also potentially simplifying the
procedure for liability claims akin to the procedure established by
MID
Action
required
- Legislative amendments to the PLD
Pros:
- PLD provides a highly harmonised framework
Cons:
- PLD applies to all defective products, therefore any changes to the
PLD would impact not only AVs but potentially all products
Source: Information compiled by the author.
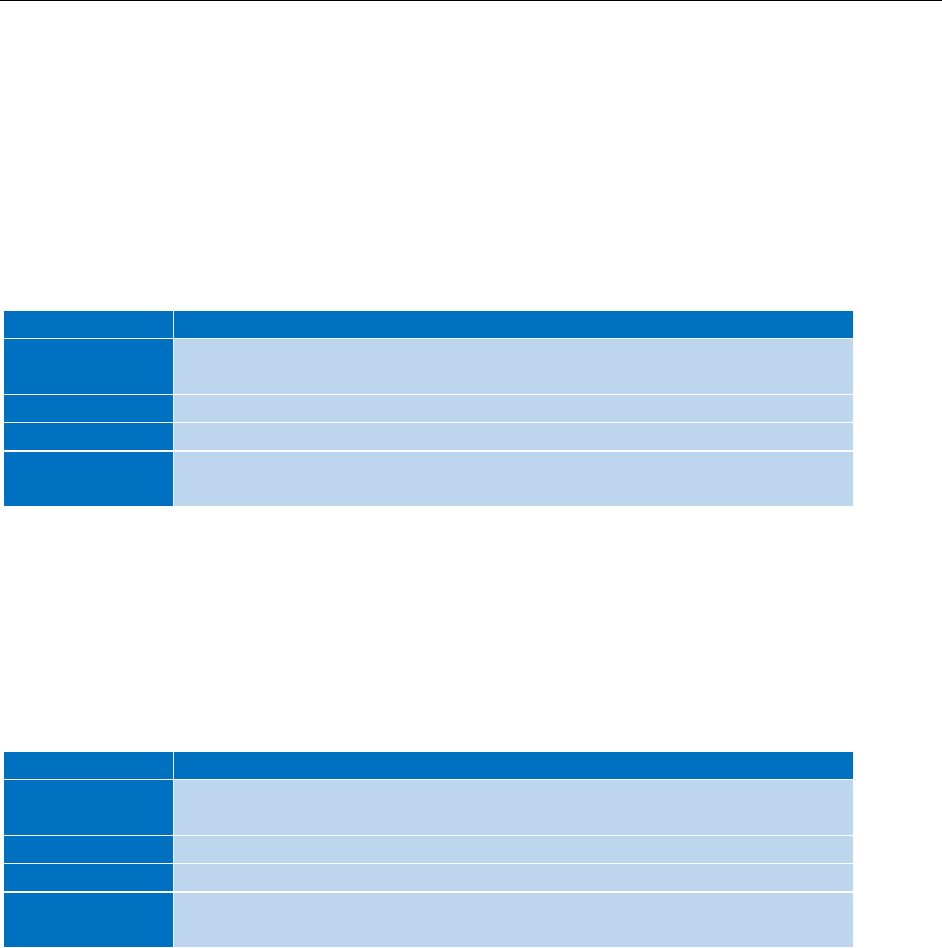
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 31
Policy option 3: reform of national traffic liability rules and the MID
This policy option would primarily harmonise national traffic liability rules and provide victims
of accidents with a common system for claims resolution. Harmonisation of substantive traffic
liability rules while arguably desirable for traffic participants, is currently not part of the MID. To
amend the substantive scope of the MID in order to include substantive provisions on the
determination of liability and compensation mechanisms would be extremely difficult.
Table 10 – Policy option 3: reform of the Motor Insurance Directive
Policy option 3: reform of the Motor Insurance Directive
Scope
- Substantive revision of the substantive scope of the MID to account for
existing gaps and cover new risks
Action required
- Legislative amendments to the MID and possible national traffic laws
Pros:
- MID provides a well-established mechanism for compensation
Cons:
- MID does not cover substantive liability law, harmonisation of national
liability laws would be difficult
Source: Information compiled by the author.
Policy option 4: new instrument on AVs to cover emerging risks (no-fault insurance)
Amendments to neither the PLD nor to the MID alone would be able to address the existing gaps
and limitations in full. Therefore, an EU instrument aiming to establish a framework for basic risk
allocation relating to AVs could be desirable.
Table 11 – Policy option 4: new legislation and no fault insurance
Policy option 4: new legislation + no fault insurance
Scope
- New instrument that would be specifically drafted to address issues
related to AVs
Action required
- Adoption of new legislation on risk allocation related to AVs
Pros:
- A coherent framework specifically applicable to AVs
Cons:
- Could be lengthy and difficult to adopt
- Possible overlaps with the PLD and MID
Source: Information compiled by the author.

European Added Value Assessment
PE 615.635 32
5. European added value
Two studies have been commissioned by the European Parliamentary Research service's
European Added Value Unit to measure European added value both quantitatively (economic
analysis) and qualitatively (comparative legal analysis). The study by Engelhard and Bruin
(University of Utrecht) focuses on analysis of gaps and constraints of the current legal framework
for liability and motor insurance within the EU and accompanying regulatory challenges. This
study measures European added value using a qualitative multi-factor approach. More
specifically, the policy options are compared against three main indicators: first, legal certainty,
second, consumer protection, and third, legal fragmentation.
The second study by Rohr, Dunkerley and Howarth (RAND Europe Consultancy) use economic
analysis to measure the possible added value for the earlier deployment of AVs of legislative
developments in the EU liability framework. They conduct a cost-benefit analysis (CBA) to
explore the scale of social and economic benefits of faster roll-out and take-up of AVs in the EU.
83
European added value is therefore measured and quantified in terms of the socio-economic costs
and benefits connected with the possible earlier than anticipated baseline roll-out of AVs.
5.1 Economic analysis
84
The main findings of Rohr and Dunkerley suggest the following:
- Accelerating the adoption curve of AVs by five years would have the potential to generate
European added value worth approximately €148 billion. For details of the calculation see
Table 12 below and Annex II.
- While the PLD is seen by experts to be of crucial importance for producers, its reform is not
necessary at this time: it is not felt 'to provide benefits in terms of roll-out and take up' of
AVs.
- The scale of the likely impact and the social and economic benefits to society resulting from
possible amendments to the PLD bringing forward the roll-out of AVs would be relatively
small.
- Based on interviews with experts, a number of legislative amendments (other than to the
PLD) might be desirable to improve the effectiveness of AVs and the coherence of the current
legislative framework. This could include: clarifying the concept of the 'driver',
preconditions for the use of AVs by minors, conditions for criminal negligence while
operating AVs and issues relating to the new risks, such as for example, cyber attacks and
hacking as well as access to accident and driving data to enable determination of liability.
83
For detailed description of methodology, method and model for quantification applied please see Annex
II (RAND Europe study).
84
The economic study is available in full in Annex II.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 33
Table 12 – Summary of cost-benefit analysis of scenarios for the EU (€ billion in 2015 prices)
85
Insurance / liability scenarios
Sensitivity tests
Consumer
impacts
S1:
Earlier
deployment
S2:
Slower
deployment
S3:
No
insurance
costs
S4:
Fully
internalised
costs
S5:
Lower
productivity
S6:
Higher
accident
rate
S7:
Increased
AV safety
S8:
50 %
shared
AVs
Transport user
impacts
116.53
-35.58
35.22
-23.95
-188.14
-879.04
17.18
315.29
Health
impacts
-1.99
0.00
-0.59
0.19
2.09
0.03
-0.36
-4.21
External
accident cost
impacts
2.34
-0.81
-22.12
6.92
0.05
-49.24
1.27
-0.10
External
environmental
cost impacts
8.60
-3.01
-0.20
0.06
0.71
-0.03
-0.12
-1.44
Tax revenue
6.57
0.82
-4.96
1.55
-2.67
130.85
-2.97
-26.81
Wider
economic
impacts
16.11
-5.55
0.75
-0.24
-226.30
-15.41
0.45
5.43
Total
148.15
-44.13
8.10
-15.47
-414.27
-812.85
15.46
288.17
Source: Rohr,Dunkerley and Howarth, Table 4, Annex II
5.2. Comparative legal analysis
The study by Engelhard and Bruin provides a detailed legal analysis of existing EU product
liability and traffic liability rules as well as comparative legal analysis of six EU Member States'
liability rules, representing three different compensation regimes. Engelhard and Bruin find that
the current legislative framework for civil liability would not provide a satisfactory regulatory
framework if applied to claims for damage caused by AVs because of serious gaps and
constraints. In relation to the gaps in the PLD, Engelhard and Bruin argue that if the current EU
framework is not reviewed:
'First, consumers will experience difficulties to establish 'defectiveness' as it will generally
not be considered 'reasonable' to expect a perfect product. Even with back-up systems
and other forms of protection, the dependence of software and high-tech operation
systems on a large scale, will have technology vulnerabilities. The safety level will be
measured according to the standards as they were, at the time of production.
Secondly, the PLD regime does not expect producers to be a frontrunner in safety risks
not yet commonly found in the branch at the time of production and, in fact, that the cost
of scientifically unknown risks will be borne by injured parties.
Thirdly, courts may lack expertise to determine the legal standard for such high-tech
products, causing uncertainty as to the exact legal safety level. Uncertainty of the law is
further increased by national differences that remain under the PLD, which make it less
transparent in cases that could be governed by more than one national jurisdiction. These
constraints seriously impede the level of consumer protection.'
86
85
See Annex II.
86
Engelhard and Bruin, Annex I.

European Added Value Assessment
PE 615.635 34
Based on the review of EU Member States' various traffic liability compensation regimes, which
could be broadly grouped into risk-based systems; fault-based systems and mixed systems,
Engelhard and Bruin find that, in general, risk-based systems would adjust better to the
introduction and roll-out of AVs than fault-based systems. However, even the current risk-based
systems are not without gaps and limitations:
'However, even in countries that have risk-based liability for motor vehicles, the driver
(or operator) of the motor vehicle is not (equally) protected, compared to other traffic
members. That is unsatisfactory, given that his position, at least in cases of full
automation, will not be different from 'regular' passengers of the vehicle. Further, the
current justification grounds for far-reaching risk-based traffic liability calls for a
reconsideration if it turns out to be true that, generally spoken, keepers and users of
autonomous vehicles are in fact 'risk minimisers.'
87
Furthermore, analysis by Engelhard and Bruin finds that neither the PLD nor the EU's Data
Protection Directive or General Regulation on Data Protection seem to provide for a
comprehensive regime on liability for specific cases of hacking and other forms of cybercrime
relating to AVs. They consider:
'As for the specific case of hacking or other forms of cybercrime, civil liability in general
is again not harmonised in the EU. Since technically it will be difficult to prove who is
responsible, CAV producers will be confronted with claims under the Data Protection
Directive (DPD) and the new General Regulation on Data Protection (GDPR). They can
held be liable in their capacity of controllers of personal data if they determine the
purposes and the means of processing personal data, or as processors of personal data
under the responsibility of a controller. But this will only be the case if a controller or
processor for instance fails to take appropriate technical and organisational measures to
protect the data from being hacked into or infringes other obligations under the DPD or
GDPR. Yet, a regulatory answer may be sought to the question whether the producer of
CAV TT could be held liable if a data breach occurs due to insufficient security measures
taken by him, while he is not a controller or a processor under the DPD or GDPR, and
taking sufficient security measures by him would thus not be required based on these
rules. Neither the GDPR or the DPD, nor the PLD seems to provide satisfactory outcomes
in this respect.'
Engelhard and Bruin conclude that there is a highly fragmented regulation of issues related to
the civil liability of motor vehicles that if applied to AVs 'may be detrimental to the internal
market for autonomous vehicles'.
88
They argue that the European added value of taking action at
the EU-level is threefold:
'Firstly, it seems imperative to promote legal certainty within the Community, which on
its turn could reduce transaction costs, adding to the EU's competitive gain in the
transport sector.
Secondly, EU-action is imperative to further increase the effectiveness of consumer
protection, as there are currently important legal gaps and challenges within the PLD
that must be addressed before the roll-out of autonomous vehicles. This is Community
law and may thus not be left to the discretion of the Member States to solve these legal
issues. Also an added value argument can be made for EU-regulatory action to alter the
national traffic liability laws and particularly to include the victim-driver in the scope of
87
Ibid.
88
Ibid.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 35
protection. In fact, some member states have yet announced that their national laws will
suffice, making it unrealistic to leave a revise in their hands.
Thirdly, EU regulatory action is necessary to create a level playing field for producers
and the member states. This could facilitate the distribution of this means of transport
within the internal market as the financial risk of liability is the same within the EU.'
89
In assessing the policy options, Engelhard and Bruin argue that a no-fault insurance model would
be the best regulatory response at EU level to allocate the risk of damage caused by AVs. This
policy solution would help to address the current gaps and constraints, contribute to legal
certainty and effectiveness, ensure consumer protection and provide certainty for producers.
Table 13 – Summary: potential European added value
Scope
Main findings on EAV
Quantitative
analysis
Quantification of
socio-economic
benefits of earlier
(than baseline 2025)
roll-out of AVs
approximately €148 billion
Qualitative
analysis
Qualitative assessment
of effectiveness,
efficiency and
coherence
reduction of transaction and litigation costs
related to the fragmentation of EU law and
divergence among MS regulations
increase in legal certainty for producers
increase in consumer trust in the new
technologies
Source: Information compiled by the author.
5.3. Comparative assessment of policy options and European added
value
Considering the objectives of the EU, and the current shortcomings of the EU liability framework,
four suggested policy options are assessed and compared along with seven qualitative criteria:
legal certainty, potential litigation burden, impact on innovation, impact on level of consumer
protection, political acceptance, degree of regulatory intervention needed and degree of
dependence on soft law (voluntary collaboration/settlements between industry and consumers,
or other stakeholders).
89
Ibid.

European Added Value Assessment
PE 615.635 36
Table 14 – Comparative policy options – European added value assessment
Source: Information compiled by the author.
Legend: An empty circle suggests no impact, a filled circle suggests a significant benefit
The seven qualitative criteria aim to measure the effectiveness, efficiency, coherence and
political feasibility of possible regulatory intervention. Effectiveness is measured in terms of
the ability of the policy intervention to close current legislative gaps and uncertainties; efficiency
is measured in terms of ease of applicability of the policy by stakeholders; coherence is measured
as the ability of the adopted rules to facilitate national and cross-border claims settlement and
resolution of conflict of law issues; finally, political feasibility is measured in terms of the legal
procedure and scope of regulatory change needed.
Policy option 1 – status quo – scores well on feasibility as it does not require any legislative action
on behalf of the EU legislator but it is the least preferable in terms of the ability to fill the existing
lacunas and potential to contribute to the achievement of common EU objectives. In this sense
this policy option provides least European added value.
Policy options 2 and 3 – which focus on the reform of the PLD (Option 2) or the MID (Option 3)
– would help to address a number of existing shortcomings. However neither reform of the PLD
nor alternatively reform of the MID alone would be able to address all the gaps. Moreover by
reforming only one of the directives, there is a danger that 'The consumer may then, in some
countries, in fact be paying twice, if one and the same risk is calculated in the price of autonomous
vehicle and in their motor insurance premium. Ultimately, this could have implications for the
roll-out of autonomous vehicles and might then create locational disadvantages for new
developers of their technology'.
90
Options 2 and 3 will both result in European added value in
terms of increased effectiveness and efficiency, however, not to the fullest potential.
Policy Option 4 suggests introducing new EU legislation and setting up a no-fault insurance
framework for damages resulting from AVs. Comprehensive legislation at EU level would have
the potential to address existing gaps and limitations in the best way. This option however
requires most regulatory change and is thus likely to be most difficult in terms of political
feasibility. Overall, however, in comparative terms, policy option 4, compared across seven
qualitative criteria would be best able to contribute to European added value.
90
Annex I, Utrecht Study, p. 72.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 37
6. Conclusions
Accelerating the adoption curve for AVs by five years has the economic potential to generate
European added value worth approximately €148 billion. Therefore public regulators have an
interest in ensuring that the regulatory framework facilitates adoption of AVs and thus
contributes to the generation of economic value. Expert national committees of Member States,
high level expert groups initiated by the European Commission, as well as a recently adopted
European Parliament resolution all underline that liability issues relating to the adoption and use
of AVs need to be clarified.
The revision of the existing regulation and/or introduction of an additional regulation on the
allocation of risks related to AVs has the economic potential to generate European added value
that could be lost if the no-action option is preferred. The European added value of the roll-out
of AVs would be generated mainly by legislative measures that would facilitate earlier adoption
of AVs. Further added value of EU action at the stage of mass adoption of AVs could be generated
through measures to reduce transaction and litigation costs relating to regulatory divergence
among various jurisdictions and measures facilitating consumer trust in the new technologies.
Coordinated action at EU level has the potential to contribute further to European added value
by reducing the transaction costs resulting from the fragmentation of national legal systems
and minimising litigation costs. Insufficient coordination between several jurisdictions on the
adoption of regulatory rules enabling the testing, licensing and operation of autonomous
technologies and vehicles could ultimately lead to unnecessary barriers to the development and
deployment of new technological solutions.
91
Clear rules at EU level, would contribute to legal
certainty and would help to avoid transaction costs resulting from divergent national legal rules.
91
OECD, Automated and Autonomous Driving, Regulation under uncertainty, 2015, p.6. Similarly, the UK
Department for Transport finds it necessary to 'provide additional clarity and certainty in legislation, to
provide a sound basis upon which to allocate criminal and civil liability'. 'The pathway to driverless cars:
summary report and action plan, 2015, UK Department for Transport, p. 10.

European Added Value Assessment
PE 615.635 38
Annex I
EU Common Approach on the liability rules and
insurance related to Connected and Autonomous
Vehicles
Final Report
by Dr E.F.D. (Esther) Engelhard and R.W. (Roeland) de Bruin, LL.M.
This policy paper should be cited as:
E.F.D. Engelhard and R.W. de Bruin (2017). EU Common Approach on the liability rules and
insurance related to Connected and Autonomous Vehicles.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 39
Table of Contents
Preface ....................................................................................................................................... 41
Summary ....................................................................................................................................... 42
List of abbreviations ................................................................................................................... 45
1. INTRODUCTION ................................................................................................................... 47
1.1 Damage caused by (or through) the automation of vehicles ......................................... 47
1.2 Central research questions and methodology ................................................................. 48
1.3 Definitions and levels of automation ................................................................................ 49
1.4 Six scenarios.......................................................................................................................... 51
1.5 Structure of this report ........................................................................................................ 52
PART 1 ....................................................................................................................................... 53
ANALYSIS OF THE CURRENT CIVIL LIABILITY RULES, APPLIED TO CLAIMS FOR
DAMAGE CAUSED BY CAVS ...................................................................................................... 53
2. THE CURRENT PRODUCT LIABILITY RULES APPLIED TO CAVS ........................ 54
2.1 Introduction .......................................................................................................................... 54
2.2 Regime of the Product Liability Directive applied to CAVs .......................................... 54
2.3 Back to the six scenarios ...................................................................................................... 63
2.4 Possible constraints, gaps and regulatory challenges ..................................................... 65
2.5 Conclusion ............................................................................................................................ 67
3. THE CURRENT TRAFFIC LIABILITY RULES APPLIED TO CAVS ........................... 69
3.1 Introduction; why claimants will prefer traffic liability over the PLD ......................... 69
3.2 Comparative overview of national traffic liability rules applied to CAVS ................. 70
3.3 Back to the six scenarios ...................................................................................................... 79
3.4 Possible constraints, gaps and regulatory challenges ..................................................... 81
3.5 Conclusion ............................................................................................................................ 82
4. HACKING AND PRIVACY ISSUES ................................................................................... 84
4.1 Introduction .......................................................................................................................... 84
4.2 Cyber liability and hacking of autonomous vehicles ...................................................... 84
4.3 Issues concerning sharing of data and information ........................................................ 86
4.3.2.1 Applicable legal framework .............................................................................. 87
4.3.2.2 TT-data, personal data? ..................................................................................... 87
4.3.2.3 Controllers, processors and data subjects ....................................................... 88
4.3.2.4 Fair and lawful processing ................................................................................ 89
4.3.2.5 Rights of data subjects ....................................................................................... 89
4.3.2.6 Data security........................................................................................................ 90

European Added Value Assessment
PE 615.635 40
4.3.2.7 Personal data breaches, liability and fines ...................................................... 91
4.3.2.8 Concluding remarks ........................................................................................... 92
4.4 Conclusion ............................................................................................................................ 92
5. CONCLUSIONS OF PART 1 ................................................................................................ 95
5.1 Product liability presents serious points of concern ....................................................... 95
5.2 Alternative route: traffic liability. Concern: not harmonised ........................................ 95
5.3 Fault liability rules: limited role for damage caused by CAVs ..................................... 96
PART 2 ....................................................................................................................................... 98
ANALYSIS AND EVALUATION OF NEW WAYS TO REGULATE CIVIL LIABILITY FOR
CAVS ....................................................................................................................................... 98
6. EUROPEAN ADDED VALUE .............................................................................................. 99
6.1 Introduction .......................................................................................................................... 99
6.2 European added value ........................................................................................................ 99
6.3 Legal basis, limits and scope ............................................................................................ 101
6.4 Policy instruments, subsidiarity and proportionality................................................... 102
6.5 Conclusion .......................................................................................................................... 103
7. THREE LEGAL 'SOLUTION MODELS' ........................................................................... 104
7.1 Introduction ........................................................................................................................ 104
7.2 Three legal 'solution models' (with combinations and variations) ............................. 104
7.3 Model 1: Product liability reform .................................................................................... 104
7.4 Model 2: Traffic liability reform ....................................................................................... 109
7.5 Model 3: No-fault insurance ............................................................................................. 111
8. CONCLUSIONS .................................................................................................................... 116
8.1 General remarks ................................................................................................................. 116
8.2 Conclusions regarding the current regulatory framework .......................................... 116
8.3 Conclusions regarding European added value ............................................................. 121
8.4 Conclusions regarding the legal solution models ......................................................... 122
Bibliography ............................................................................................................................... 126

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 41
Preface
Numerous companies and researchers are working hard on the development of motor vehicles that
are more and more autonomous and even fully autonomous (driverless), sensing their
environment and navigating without human input. Also, various cities in Europe are planning
transport systems for driverless cars and several countries have already allowed these cars to be
tested on public roads. In the meanwhile, the question arises as to where responsibility lies or
should lie for damage resulting from casualties with semi-autonomous and autonomous vehicles.
This study seeks to shed light on the applicability and gaps and constraints of the current legal
frameworks for liability and motor insurance within the EU, and regulatory challenges that lie
ahead. It focuses on the regulatory role that the EU, and the European Commission in particular,
could play and the European Added Value.
The present report has been prepared for the Directorate for Impact Assessment and European
Added Value, with the Directorate General for Parliamentary Research Services (DG EPRS) of the
General Secretariat of the European Parliament. By issuing this report, we hope to make a positive
contribution to the European debate on where liability for damage caused by or with autonomous
vehicles should lie and how the balance can be struck between all the interests involved in this
issue. The Utrecht Centre for Accountability and Liability Law, UCALL, conducts and
commissions multidisciplinary research and studies, inter alia on issues involving liability,
insurance and damage.
We would like to express our thanks to Tatjana Evas and to Prof. Ivo Giesen, for his feedback on
an earlier draft of this report. Further, we have had the benefit of meetings at various occasions
with researchers of Rand Europe, in particular Charlene Rohr and Fay Dunkerley, who were
conducting an empirical study in the same project to quantify the social and economic impacts of
different legislative scenarios, including changes to the Product Liability Directive, on roll out of
fully autonomous, or self-driving, vehicles. The current report also benefited from the valuable
exchanges of views with Prof. David Howarth of Cambridge University. Responsibility for the full
text and ideas expressed in this report, however, lies solely with its authors.
The main part of Chapter 4 (sections 4.1-4.3) has been written by Roeland de Bruin; the other parts
and chapters were written by Esther Engelhard.
The arguments expressed in this report are solely those of the authors, and do not reflect the
opinion of any other party. Any errors that remain in the report are the responsibility of the authors.
Comments or questions with regard to this report will be appreciated by the authors and can be
directed to: E.Engelhard@uu.nl.
Utrecht, May 2017,
Esther Engelhard, project leader.

European Added Value Assessment
PE 615.635 42
Summary
Who bears the risk that the new automation technology built in motor vehicles, that partly takes
over tasks of the driver or even all driver tasks, causes damage to individuals (the owner or user
of the autonomous vehicle itself and other traffic members)? Part 1 of the current report contains
an assessment of how the current rules for product liability and traffic liability and the fault
liability rules within six EU member states (viz. Belgium, France, Germany, the Netherlands,
Sweden and the UK) could be applied to autonomous vehicles. Part 2 of the report contains a
meta-legal analysis of the possible legal solutions. It identifies three solution models, which are
analysed and evaluated as to each model's pros and cons, incorporating the different arguments
and perspectives in the current debate and actual initiatives and developments in the member
states.
In Part 1, the current study finds that, in the absence of legislative intervention, national risk-
based and to a lesser extent fault-based rules for civil liability will become highly relevant if
applied to claims for compensation after casualties with autonomous vehicles, but that these rules
will not give satisfactory results as these contain serious gaps and constraints in this respect.
Regulatory revision must therefore be considered.
These findings are based on an assessment of the national rules of civil liability law. Generally,
these rules require personal fault of the party who is held liable, which have a limited role to play
if the technology itself breaks down, fails, is being hacked, etcetera. More relevant is the product
liability directive (PLD), which imposes liability on the producer of the motor vehicle for its
defectiveness. An advantage of the PLD regime is that it does not require personal fault and that
it also offers protection in cases of single-vehicle accidents. However, the PLD regime contains
several gaps and constraints if applied to claims for damage caused by autonomous vehicles.
First, consumers will experience difficulties to establish 'defectiveness' as it will generally not be
considered 'reasonable' to expect a perfect product. Even with back-up systems and other forms
of protection, the dependence of software and high-tech operation systems on a large scale, will
have technology vulnerabilities. The safety level will be measured according to the standards as
they were, at the time of production. Secondly, the PLD regime does not expect producers to be a
frontrunner in safety risks not yet commonly found in the branch at the time of production and,
in fact, that the cost of scientifically unknown risks will be borne by injured parties. Thirdly, courts
may lack expertise to determine the legal standard for such high-tech products, causing
uncertainty as to the exact legal safety level. Uncertainty of the law is further increased by
national differences that remain under the PLD, which make it less transparent in cases that could
be governed by more than one national jurisdiction. These constraints seriously impede the level
of consumer protection.
Another route to claim compensation is to invoke the national rules on traffic liability. Claims for
compensation against other traffic members are generally based on fault. This is most relevant
for vehicles at SAE automation-levels 1 to 4 (section 1.3). At SAE automation-levels 5 and 6, there
can be fault liability of the operator of the vehicle, but this will, on the average of cases, be
exceptional. In some member states, owners and/or keepers of motor vehicles incur risk-based
liability, which seems more in line with the fact that the technology which 'autonomises' the
vehicle seeks to replace the human driver. For the majority of casualties, this means that claims
for compensation will more easily succeed if based on these risk-based laws, in their current form,
than on mere fault-based liability of the driver/operator of the autonomous vehicle. However,
even in countries that have risk-based liability for motor vehicles, the driver (or operator) of the
motor vehicle is not (equally) protected, compared to other traffic members. That is
unsatisfactory, given that his position, at least in cases of full automation, will not be different

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 43
from 'regular' passengers of the vehicle. Further, the current justification grounds for far-reaching
risk-based traffic liability calls for a reconsideration if it turns out to be true that, generally spoken,
keepers and users of autonomous vehicles are in fact 'risk minimisers'.
Given these many gaps and difficulties under the current civil liability laws, suggestions have
been made to either revise or complement civil liability law in light of autonomous vehicles.
Several member states are currently considering how their domestic civil liability laws and other
compensation schemes may affect the automotive producer/software producer, the owner and
the user of the autonomous vehicle, rental companies, other road users, etcetera. Some member
states are considering special legal arrangements to regulate civil liability for accidents caused by
autonomous vehicles, such as the proposed 'Vehicle Technology and Aviation Bill' that was laid
before the UK Parliament in February 2017. This bill holds third-party insurers in the UK
primarily liable for damage caused by an automated vehicle when driving itself. But the fact that
there are different domestic rules within the EU that govern the civil liability for the parties
concerned, varying from lenient to very strict liability, is an impediment to the roll-out of
automated vehicles in Europe, also in light of its competitiveness.
As for the specific case of hacking or other forms of cybercrime, civil liability in general is again
not harmonised in the EU. Since technically it will be difficult to prove who is responsible, CAV
producers will be confronted with claims under the Data Protection Directive (DPD) and the new
General Regulation on Data Protection (GDPR). They can held be liable in their capacity of
controllers of personal data if they determine the purposes and the means of processing personal
data, or as processors of personal data under the responsibility of a controller. But this will only
be the case if a controller or processor for instance fails to take appropriate technical and
organisational measures to protect the data from being hacked into or infringes other obligations
under the DPD or GDPR. Yet, a regulatory answer may be sought to the question whether the
producer of CAV TT could be held liable if a data breach occurs due to insufficient security
measures taken by him, while he is not a controller or a processor under the DPD or GDPR, and
taking sufficient security measures by him would thus not be required based on these rules.
Neither the GDPR or the DPD, nor the PLD seems to provide satisfactory outcomes in this respect.
National law again determines whether the operator or owner/keeper of an autonomous vehicle
has the obligation to install software (security) updates and whether, if he did not comply, he
could be held liable for the damage a hack causes. In countries with risk-based traffic liability
(Belgium, France, Germany, the Netherlands) or direct insurance (Sweden and the UK's current
legislative proposal), this risk will generally fall under the scope of these laws and will then be
borne by the owner or keeper of the autonomous vehicle or his liability motor insurance carrier.
All in all, Part 1 reveals highly fragmented outcomes, which may be detrimental to the internal
market for autonomous vehicles. Here lies an interest for the EU to regulate traffic liability at least
for the extra strains put on protective law systems (France, Belgian, Sweden): in these countries
the producer's risk will, at least prima facie, be borne by liability motor insurers. If in these member
states risk-based liability for motor vehicles is an easier route to follow than claims based on
product liability, then this could – inter alia – impact liability motor insurance premiums in those
particular countries. The other side of this coin is that, if the paying motor insurer does not pursue
its reimbursement claim, the producer's risk of liability will be smaller than in countries that have
less 'claimant-friendly' (protective) traffic liability laws.
Part 2 of this report comprises of a normative analysis to assess the added value of taking
legislative action at EU-level and to find the appropriate legal options.

European Added Value Assessment
PE 615.635 44
The European Added Value is assessed through a multi-factor approach which has been regularly
used. This is consistent with the purpose of striking a fair balance between innovation and legal
protection of fundamental values such as personal safety. Regulatory action at EU-level in this
context results from three factors.
Firstly, it seems imperative to promote legal certainty within the Community, which on its turn
could reduce transaction costs, adding to the EU's competitive gain in the transport sector.
Secondly, EU-action is imperative to further increase the effectiveness of consumer protection, as
there are currently important legal gaps and challenges within the PLD that must addressed
before the roll-out of autonomous vehicles. This is community law and may thus not be left to
the discretion of the member states to solve these legal issues. Also an added value argument can
be made for EU-regulatory action to alter the national traffic liability laws and particularly to
include the victim-driver in the scope of protection. In fact, some member states have yet
announced that their national laws will suffice, making it unrealistic to leave a revise in their
hands.
Thirdly, EU regulatory action is necessary to create a level playing field for producers and the
member states. This could facilitate the distribution of this means of transport within the internal
market as the financial risk of liability is the same within the EU.
Three different legal solution models are investigated to allocate the risk of damage caused by
autonomous vehicles: a reform of product liability, a reform of traffic liability and no-fault
insurance. Based on the goals of legal certainty, the scope of protection and efficient claim
handling, a no-fault insurance model is proposed to adequately help alleviate the current gaps
and constraints.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 45
List of abbreviations
BGB Bürgerliches Gesetzbuch (the German Civil Code)
BGH Bundesgerichtshof
BW Burgerlijk Wetboek (the Dutch Civil Code)
CAV(s) connected autonomous vehicle(s)
CC Code Civil (the French Civil Code)
CJEU Court of Justice of the European Union
DPD Data Protection Directive
DPEC Directive on Privacy and Electronic Communications
EC European Community
ECC-net Network of European Consumer Centres
ECHR European Convention on Human Rights
ECR European Court Reports
Ed(s). Editor(s)
EDPA European Data Protection Board
EEA European Economic Area
EEC European Economic Community
EFTA European Free Trade Organisation
e.g. exempli gratia (for example)
et al. et alii (and others)
EU European Union
EWCA Civ. England and Wales Court of Appeal (Civil Division)
EWHC England and Wales High Court
GPS Global positioning systems
GPSD General Product Safety Directive (Directive 2001/95/EC)
GDPR General Data Protection Regulation
HR Hoge Raad
ITF International Transport Forum
LB Loi Badinter (the French Road Traffic Act)
OECD Organisation for Economic Co-operation and Development
OJ Official Journal of the European Union
Para(s). paragraph(s)
PIQR Personal injuries and quantum reports
PLD Product Liability Directive

European Added Value Assessment
PE 615.635 46
pp. page numbers
PLD Product Liability Directive (Directive 85/374/EEC)
SAE Society of Automotive Engineers
StVG Strassenverkehrsgesetz (the German Road Traffic Act)
TEU Treaty on European Union
TFEU Treaty on the Functioning of the European Union
TT tracing technology
V2I vehicle-to-infrastructure communication
V2V vehicle-to-vehicle communication
V2X vehicle-to-everything communication
WAM Wet aansprakelijkheidsverzekering motorrijtuigen
WCAM Wet Collectieve Afwikkeling Massaschade (the Dutch 'Collective
Mass Settlement Act')

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 47
1. INTRODUCTION
1.1 Damage caused by (or through) the automation of vehicles
As cars are increasingly being equipped with technology that assists in certain aspects of driving,
the question as to who should bear the damage in the case of accidents remains unclear. The
current automotive technology includes lane keep assistance, emergency braking, parking
assistance and adaptive cruise control. Yet higher levels of car automation and interconnection of
cars with each other and other elements of road and telecommunications infrastructure have also
been developed. Eventually this could lead to the wide introduction of fully autonomous
vehicles: vehicles that are capable of operating on the roads without direct human intervention.
Studies point to significant social and environmental future benefits, particularly improving
safety.
92
However, in some cases the automation and interconnection of motor vehicles will cause
damage to individuals. A relatively small number of casualties has already been reported by the
media.
In 2016, after some minor collisions of Google self-driving cars on public roads, Google's Lexus SUV
test driver hit a bus in its attempt to avoid sand blocks as it expected the public transit bus
approaching from behind to stop.
93
But the first fatal accident caused by the automation of a semi-
autonomous vehicle has also been reported. It involved one of Tesla's model S cars that crashed while
using its AutoPilot function, advanced cruise control that includes lane keep, changing lanes and
adjusting speed in response to traffic. The car made no attempt to apply the brakes when in front of
it, on a Florida highway, an 18-wheel tractor-trailer turned left. According to Tesla, neither AutoPilot
nor the driver had noticed the trailer's white side against the brightly lit sky: '(…) the system is new
technology and still in a public beta phase before it can be enabled. When drivers activate Autopilot they are
warned to keep their hands on the steering wheel at all times'.
94
In February 2017 a legislative proposal has been laid before the UK Parliament that addresses this
issue. Under this so-called 'Vehicle Technology and Aviation Bill' third-party insurers would
primarily be liable for damage caused by an automated vehicle when driving itself.
95
Several
other Member States of the EU have also come up with initiatives to consider whether or not to
introduce special rules of liability for autonomous vehicles.
96
In the absence of special legislation,
claims for compensation of the damage will be governed by the current national liability rules.
Under the current rules several parties could be held liable for accidents caused by autonomous
or semi-autonomous motor vehicles: the automotive/software producer, the owner and/or user
of the autonomous vehicle, rental companies, other road users, etcetera. But the current rules have
not been designed for these claims for compensation as the technological developments referred
to above took place long after these rules were created. Consequently, there is a need to assess
how the current civil liability rules can be applied to accidents caused by (the testing or regular
use of) automated vehicles and to explore the legal possibilities in order to improve these current
rules and/or to find new rules upon which to allocate civil liability.
97
92
KPMG, 2015; Atkins Ltd., 2015.
93
http://www.wired.com/2016/02/googles-self-driving-car-may-caused-first-crash/.
94
At https://www.teslamotors.com/en_GB/blog/tragic-loss?redirect=no (30 June 2016).
95
House of Commons Bill 143, 22 February 2017. See further infra, section 3.2.3.
96
See the overview presented in section 3.2.3 below, with references.
97
Ibid. the UK Department for Transport, 2015, p. 10; OECD/ITF, 2015, p. 6-7.

European Added Value Assessment
PE 615.635 48
The choice on whom to impose civil liability clearly has consequences. Uncertainty and
unpredictability of liability law may detract from consumer confidence in autonomous vehicles
and from the eagerness of developers and investors (and thus, ultimately, their success rate).
Users, developers, producers and insurers want to know the risks before they take the initiative
to use, create, test and market. The high potential of the autonomous vehicles sector marks the
necessity of an adequate regulatory framework for civil liability and insurance. Who will bear the
costs if autonomous vehicles cause damage? For what types of situations can developers and
producers of autonomous vehicles expect to be held liable? To what extent can drivers/operators
of autonomous vehicles be held liable for damage suffered by third parties?
Legal uncertainty is further increased by the many differences that currently exist between
national jurisdictions. Within the EU, different domestic rules govern the civil liability of car
owners, drivers/operators, producers and alike. Consequently, these parties incur civil liability
on different legal grounds, varying from lenient to very strict liability. A commonly heard
statement is that this is (or could be) a serious impediment to the roll-out of automated vehicles
in Europe,
98
also in light of its competitiveness.
99
1.2 Central research questions and methodology
The purpose of this study is to investigate the possible scope and added value of taking legislative
action on the EU level. It is based on a legal assessment of the current legal framework at the level
of the EU and the national level, the latter in the form of a comparative legal analysis. The central
questions are:
1. Is there a need for amendments to the current regulatory framework on civil liability for the testing
and the use of (connected and) autonomous vehicles?
2. What is the added value of regulatory action by the EU to establish these amendments and in what
form should such action be relevant?
3. What legal solutions must be considered and which legal solution is preferable?
The first research question calls for an inventory and analysis of existing laws, whereas the last
two research questions are 'design questions' to find possible new solutions, for example by
remodelling or designing laws. In line with this, the methodology that was used for this research
is two-fold. First, current civil liability rules were inventoried and analysed to discover whether
and how these rules can be applied to autonomous vehicles (Part 1 of this report). Then, potential
legal solutions were modelled and investigated as to their pros and cons and the question
whether EU intervention is feasible (Part 2 of this report). This two-fold methodology will now
be explained.
For the first research question, a legal inventory was made to assess how the rules for product
liability and traffic liability and the fault
100
liability rules within a number of EU Member States
could be applied to autonomous vehicles. Given the limited timeframe available for the current
98
C-ITS Deployment Platform, 2016, p. 13; Schellekens, 2015.
99
Lengton, et al., 2015, p. 14.
100
I.e. the general fault liability rules, not specifically designed for specific damage causing objects or
activities such as products, traffic or alike.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 49
research, a selection was made of six countries and their main rules: Belgium, France, Germany,
the Netherlands, Sweden and the UK. These countries represent three systematically different
and opposite legal compensation mechanisms in the EU for the damage caused in traffic. As will
be shown in Chapters 2, 3 and 4 of the report, several points were found under the current civil
liability rules that call for solutions.
The second and third research questions are addressed in Part 2 of this report, chapters 6 and 7.
This part of the study comprises of a normative analysis to assess added value of taking legislative
action at EU level with regard to the civil liability (and insurance) for damage caused by
autonomous vehicles. The underlying issue is how the risk of causing damage presented by
autonomous vehicles can be regulated: who must legally bear the damage caused by autonomous
vehicles, what are possible legal alternatives, does this call for EU regulatory action and if so, in
what form?
The focus in this part of the report is on the pros and cons of allocating the cost of accidents caused
by autonomous vehicles to different parties under these three models, roughly spoken: to the
industry, the owner, driver/operator, other parties, or combinations. The 'ideal' legal
arrangement finds a balance between, on the one hand, promoting and facilitating the mobility
of individuals and stimulating economic and social advantages of autonomous vehicles and, on
the other hand, offering adequate protection to individuals against the damage suffered thereof
and respecting fundamental rights of individuals (in particular the right to life, bodily integrity
and privacy).
Based on the available literature, reports and other documents (that will be referred to), the
researchers investigated ways to allocate the risk and translated these into three legal solution
models. Since these are hypothetical models, designed for future law, their value cannot be
measured. Rather, the evaluation is based on three normative criteria: legal certainty, the scope
of protection and efficient claim handling. Legal certainty is a leading factor that is missing in the
current legal framework as this was not designed for autonomous vehicles: the law must enable
the parties to the scope of protection must be wide enough in terms of the categories of victims
protected. Efficient claim handling means that the process enables victims to receive monetary
compensation against relatively low costs for both parties involved. Costs are not measured in
monetary terms but rather in terms of the presumed effort, length of procedure and possible
expenses for both parties in order to solve the claim.
1.3 Definitions and levels of automation
'Autonomous technology' is a broad concept. It is hard to capture by a single definition. It may,
generally, be characterised as: 'items that do not require human engagement',
101
at least not in the
actual operation of their system. It also covers single devices, such as airbags and parking
assistance. 'Autonomous vehicle technology' sees to the 'technologies and developments that enable a
vehicle to assist, make decisions for, and, ultimately, replace a human driver'.
102
This study is concerned
with autonomous vehicles or, dependent on the context, more specifically so-called 'connected
and autonomous vehicles', hereinafter: CAVs. The last type consists of three elements.
101
Funkhouser, 2013, p. 441.
102
Rand report, 2009, p. 3 and Funkhouser, 2013, p. 441.

European Added Value Assessment
PE 615.635 50
Vehicles are taken to be motorised cars, used for the transportation of goods and/or
people and for carrying out services, including consumer cars, commercial cars and
trucks.
Autonomy relates to the level of human intervention necessary for operation, which
can be seen as a spectrum: a lower need for human intervention implicates a higher
level of autonomy (see below). Software operating the vehicle is intelligent, it can
perceive its surroundings, and is able to adapt the driving behaviour to changing
environments. It includes the ability to learn, to process complex information and to
solve problems.
103
The notion that vehicles are connected implicates that these are connected to other
CAVs (vehicle-to-vehicle, or V2V communication) and/or to telecommunication
infrastructure (vehicle-to-infrastructure, or V2I communication). Other technologies
connect the vehicle to all appropriate technologies (vehicle-to-everything, or V2X).
This report sees to both fully autonomous and to semi-autonomous vehicles, with a specific focus,
if relevant, on those autonomous vehicles that are connected. At certain points in the report, it is
necessary to be precise as to the exact level of autonomy of the vehicle concerned. The Society of
Automotive Engineers (SAE) identifies six levels of driving automation. These so-called SAE-
levels will be used in the current report as point of reference.
104
The six SAE-levels vary from 'no
automation' (level 0) to 'full automation' (level 5). It can be assumed though that even with fully
autonomous vehicles, a basic level of human control will be maintained, by setting the car or
instructing it to get ready and to find a certain destination and stopping it when and if desired.
The four levels in between span from:
vehicles that offer driver assistance by the execution of only one specific task, being either the
steering or the acceleration/deceleration of the vehicle, while the driver monitors the
environment and performs all other aspects (level 1, 'mere' driver assistance),
vehicles that execute both the steering and acceleration/deceleration, leaving other tasks
including monitoring to the driver (level 2, partial automation),
vehicles that perform all tasks automated but with the expectation that the human driver will
respond appropriately to a request to intervene (level 3; conditional automation), to
vehicles that only request that the driver will respond in critical circumstances (level 4; high
automation).
Below, from level 1 upward, all levels of automation are included when using the terms
'autonomous vehicles' and 'CAVs'. All are object of this study.
103
De Cock Buning, Belder and De Bruin, 2012, p. 198.
104
www.sae.org/misc/pdfs/automated driving.pdf; Gasser, Arzt, Ayoubi, a.o., 2013.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 51
1.4 Six scenarios
To make the assessment of the current rules more concrete, six scenarios will be referred to
throughout this report. The first three concern technical defects.
1. Scenario 1: hardware failure. This scenario concerns the driver/operator of an
autonomous vehicle who is confronted with a sensor that has not properly detected a
sudden lane closure for repair work with conflicting road lines.
105
This raises the
question who would or should be liable if the failing sensor caused the car to slip.
2. Scenario 2: software failure. This scenario is different from the former in that instant
malfunctioning of its software that caused the car to slip. Undefinable symbols appear
on the user's display. This scenario introduces the software producer as a possible cost
bearer. As will be seen below, this case also stands for the intricate complexities of the
question as to 'defectiveness'.
3. Scenario 3: wireless network collapse. In this scenario, there was an unplanned
construction of a roundabout during the night.
106
The next morning the car is, due to
network problems, unable to obtain these data before and while it is used. It fails to
download the information in time. As a result, it has to make an emergency stop,
causing it to slip and crash into the barrier. Next to the operator and the manufacturer
of the vehicle (or its software), this scenario introduces the wireless network provider
as a potentially liable party.
Scenarios four and five involve human behaviour and are not primarily caused by mechanical
malfunctioning.
4. Scenario 4: users' personal fault. Here, the driver/operator of the automated vehicle is at fault
for not following the instructions properly, by not updating the software or not keeping his
hands on the steering wheel.
5. Scenario 5: third parties' hacking. This concerns the 'hacking' of the programming
software of the autonomous vehicle by third parties, due to which the autonomous
vehicle is no longer responding and crashes.
Scenario six involves the particular programming choice.
6. Scenario 6: programming choice. This scenario presents a case in which the
autonomous vehicle tries to avoid hitting a house, but collides with a pedestrian, who
is seriously injured.
These scenarios may involve different aggrieved parties and heads of damage for which there are
different legal rules. Personal injuries, physical or mental (trauma) can lead to pecuniary losses
(the loss of earnings, medical expenses, rehabilitation costs, and other costs). Also immaterial
damage may result from this, such as pain and suffering, specific inconveniences and cosmetic
defects. Fatal injuries may cause the financial dependants to suffer a loss of maintenance, extra
housekeeping costs and funeral expenses. Individuals may suffer property damage, for example
105
Aon Risk Solutions, 2015, p. 6-7.
106
See http://www.blmlaw.com/publications/20684/pdf/127.09.2015 %20-%20ER%20-
Driverless%20Cars%20latest%20A4%20web.pdf

European Added Value Assessment
PE 615.635 52
for their car, bicycle or cell phone and incur repair costs, replacement costs, costs of car rental or
lost profits.
We will refer to the above scenarios in different contexts throughout the report.
1.5 Structure of this report
This report consists of two parts. Part 1 presents the legal analysis of the current civil liability
rules and the need for regulatory action (Chapters 2, 3 and 4). Part 2 presents an assessment of
the European added value and the EU's regulatory tools (Chapter 6), followed by an inventory
and normative analysis of the legal solutions (Chapter 7).
Part 1 of the report
Chapters 2, 3 and 4 review the current civil liability rules if applied to autonomous vehicles. These
chapters indicate constraints, gaps and regulatory challenges within the current legal framework.
In Chapter 2 the EU (and national) rules for defective products will be analysed in respect of its
relevance for testing and the use of autonomous vehicles, both at EU level and the national level.
In Chapter 3 national rules on traffic liability (and relevant EU rules) of the six countries as
aforementioned will be analysed with regard to their relevance for the testing and the use of
autonomous vehicles. In Chapter 4 attention will be paid to the different national rules on fault
liability and the specific topics of hacking and privacy. Chapter 5 presents the main conclusions
of Part 1 of the current report.
Part 2 of the report
Chapter 6 reflects on the question whether member states would benefit from EU-intervention
and what possible legal options the EU has to enhance the options as proposed. This includes legal-
technical grounds for authority in community law and the form(s) in which action could be taken
in respect of the liability for autonomous vehicles.
Chapter 7 presents three different solution models to make civil liability law more 'fit' for the
introduction of autonomous vehicles: a reform of product liability, a reform of traffic liability and
no-fault insurance. Each model will be investigated as to what the model entails and its pros and
cons in respect of the gaps and constraints that were presented in Part 1 of this report. These
models will also be assessed on the basis of three normative criteria as aforementioned: legal
certainty, the scope of protection and efficient claim handling.
The conclusions and recommendations are presented in Chapter 8.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 53
PART 1
ANALYSIS OF THE CURRENT CIVIL LIABILITY RULES, APPLIED TO
CLAIMS FOR DAMAGE CAUSED BY CAVS
This part of the report provides an analysis of how the current national rules on civil liability law
can be applied to cases that involve damage caused by autonomous vehicles. To the extent that
the damage is not covered or remedied by other private insurance, such as medical insurance and
hull insurance, and/or social arrangements, individuals themselves must rely on civil liability
law and liability insurance (third-party insurance). The EU member states each have their own
national rules on civil liability.
The roll-out and testing of automated vehicles will mainly affect three domains of civil liability
law: rules on liability of manufacturers for defective products (product liability), rules on liability
of motor vehicle owners/keepers (traffic liability) and the general fault liability rules.
107
The
following three chapters will explore the relevance, legal challenges and constraints of these rules
in their current form. What are the legal implications if these rules are applied to autonomous
vehicles? The goal is to assess whether these rules, in their current form, call for legislative action.
The set-up of this part is as follows. Chapter 2 will deal with product liability law, Chapter 3 with
traffic liability law and Chapter 4 with the general fault liability rules in the Member States
(applied to hacking and with their relevance for some related issues of sharing of data and
information). These chapters each have the same structure: after a basic explanation of the legal
background, we will treat the applicability to CAVs, possible constraints, gaps and the challenges
of the existing rules. What follows, lastly, is our conclusion of this Part of the report.
107
I.e. fault liability rules that are not specifically designed for particular damage causing activities or objects
such as products, traffic and alike.

European Added Value Assessment
PE 615.635 54
2. The current product liability rules applied to CAVs
2.1 Introduction
In this chapter the applicability, challenges and constraints of civil liability rules for products will
be analysed in respect of autonomous vehicles. Its set-up is as follows. First, an analysis is made
of how product liability could be applied to casualties with autonomous vehicles (section 2.2) and
to the six scenarios as were set out above (section 2.3). What follows, is an overview of the
constraints, gaps and regulatory challenges (section 2.4) and the conclusion (section 2.5).
2.2 Regime of the Product Liability Directive applied to CAVs
2.2.1 Rationale
In the current system, producers' liability is governed by national law. National rules determine
whether or not the producer can be held liable to compensate the inflicted damage. The claim for
damages against the producer can be based on negligence (fault) or on so-called strict liability:
risk-based liability, regardless of fault. The Product Liability Directive (PLD)
108
harmonises the
national rules on strict liability within the EU. That is: as far as producers can be called in action
for the defectiveness of their products. Its purpose is manifold:
109
'guaranteeing that competition
will not be distorted, facilitating trade within the common market, consumer protection and ensuring the
sound administration of justice'.
110
The PLD came about after great efforts to find consensus.
111
It imposes a regime of strict liability
on producers for any defectiveness of their products. It prescribes that EU and EFTA member states
impose risk-based liability for the product's defectiveness in their national laws. Each member
state must implement the ruling as prescribed. The PLD lays down the conditions and available
defences for this risk-based liability, the expiration period, the onus of proof, etcetera. National
implementations have taken either the form of (part of) specific legislation in some countries or
are laid down in their Civil Codes.
112
The various national implementations of the PLD account for a great number of legal differences
within the EU. Firstly, national interpretations of the PLD differ per member state. Secondly, the
PLD leaves several topics open to the member states' discretion, such as the rules of civil
procedure and particularly regarding the exact level of proof that is required, the assessment of
the facts and the calculation of damages. Thirdly, the PLD has a rather limited scope. It does not
harmonise other possible grounds for civil liability of producers than defectiveness of the product. It
leaves fault liability (and contractual liability) of producers untouched. Thus, there are differences
in the related national rules of civil procedure law, contract and tort law. All in all, claims for
defective products are treated differently in the national regimes within the EU. These differences
108
Council Directive 85/374/EEC of 25 July 1985 on the approximation of the laws, regulations and
administrative provisions of the Member States concerning liability for defective products, OJ August 7,
1985, L 210, pp. 29-33, as amended by Directive 1999/34/EC of the European Parliament and of the Council
of 10 May 1999, OJ June 4, 1999, L 141, pp. 20-21.
109
Van Dam, 2013, p. 420.
110
CJEU 25 April 2002, Case C-52/00, ECR 2002, I-3827, para. 29; cf. the recital of the PLD.
111
See Shears, 2007.
112
Per October 1, 2016 the current French implementation of the PLD, Article 1386 of the French Code Civil
(CC), was renumbered as Article 1245 CC.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 55
account for different outcomes,
113
which has lead some authors to claim that the PLD falls short
in its purpose to provide harmonised consumer protection and to create a level playing field for
the industry.
114
Be this as it may, in its observations in 2006 the European Commission claimed
the national differences did not negatively affect the functioning of the Internal Market.
115
2.2.2 The 'common core': main rules of the PLD
The PLD prescribes under which conditions liability of producers and suppliers may arise for the
defectiveness of products put into circulation within the EEA (EU, Norway, Liechtenstein and
Iceland). It defines which parties are qualified as producer (or supplier) and – in general terms –
what can be qualified as a 'product' and when that product must be characterised as 'defective'.
The latter does not depend on fault or negligence of the producer. The PLD creates strict (risk-
based) liability. If the consumer shows that the product was defective and that this caused the
damage, the producer is liable. The producer can then only raise the available defences (see
section 2.2.5).
2.2.3 Liable parties under the PLD: who bears the risk?
Producers and developers. The PLD is relevant for several parties involved in the creation and
marketing of automated vehicles. Its risk-based liability rests on the 'producer', which is not
limited to the traditional automotive industry and other manufacturers of autonomous vehicles.
It also rests on 'any person who, by putting his name, trade mark or other distinguishing feature on the
product presents himself as its producer'. This may include developers who use their own brand. It
includes the manufacturer of components, such as wheels, airbags and sensors. Technology
providers are thus also included, if they deliver technology which is subsequently being used as
a component of the vehicle. The PLD also imposes risk-based liability on importers.
116
The producer can escape liability based on the defence that he has not put the product into
circulation. Testing companies and developing companies may claim this (or claim that they are
not the producer). If aware of certain risks, the latter companies (such as Google) could still be
liable based on other (fault-based) national rules on civil liability. Similarly, other parties-that-are-
not-the-producer, inter alia public authorities that grant permits for the roll-out and the use of
autonomous vehicles, may be liable for not adequately ensuring road safety in cases of
malfunctioning. Liability will then generally be fault-based: the victim must claim how the testing
company, technology developer or public authority has violated his individual interests.
Component makers. The term 'producer' includes producers of components of the vehicle such
as the sensing hardware and operating software. According to the PLD, component producers
incur liability for defects found in the vehicle. Hardware and software producers thus also bear
the risk of defects other than those specifically produced by their particular technology.
113
Also other factors can be pointed at, such as national variations in consumer attitudes. These were
findings in the Lovell's report, 2003; cf. Shears, 2007, p. 907.
114
Jones Day, 2012, p. 4.
115
European Commission, 2006, p. 11.
116
Article 3 (1) of the PLD.

European Added Value Assessment
PE 615.635 56
However, as any producer, the component producer has a list of defences to his avail. This list of
defences is in the PLD, as cited in this report.
117
The last defence in this list (defence sub f) is
particularly relevant. Producers of a component escape liability if the damage is caused by a
'design defect' or an 'information defect'. They can only be held liable for so-called 'manufacturing
defects'. The claimant has the choice whether to sue the producer of the autonomous vehicle
and/or the producer of a component. To the extent that one of the producers compensates the
claimant, the former may address others for reimbursement in accordance with each producer's
share. The PLD does not indicate how the contributions of each producer must be divided, albeit
there may be contractual arrangements to determine this.
Software (and hardware) makers. The term 'product' under Article 2 of the PLD includes those
'incorporated into another movable or into an immovable'. This means that components of the
autonomous motor vehicle, such as its operating software system and/or hardware, can also be
qualified as a product of their own – separate from the vehicle as a whole. If the vehicle's software
or hardware was produced by another company (e.g. the American Cybernet Systems) and if it is
defective, then that company may also incur strict liability under the PLD. Although legal-
technically not yet decided, the facts indicate that software should be included in the definition
of 'product' under Article 2. The European Commission has argued in favour of a broad
definition, a view that is supported by a majority of academics;
118
the CJEU has not yet decided
on this matter.
119
This approach can, obviously, only be successful if it can be shown that the
software or hardware itself was defective. That may involve specific knowledge that neither the
injured party nor the court may possess. Moreover, it is presumed that the software producer is
traceable while not much is known about the supply chain of the software, as this is classified
information for most manufacturers.
120
Car-dealers, suppliers. If the manufacturer cannot be identified, the distributor or the supplier
(seller) can be held liable within the scope of the PLD, unless he informs the injured person within
a reasonable time of the identity of the producer or of the person who supplied him with the
product.
121
The CJEU has on several occasions decided that 'the choice was made to allocate liability
for defective products in principle to producers and only in certain defined cases to importers and
suppliers'.
122
If the manufacturer can be identified by distributors or suppliers, or if the latter have adequately
informed the injured person as aforementioned, they do not risk liability under (the national
implementations of) the PLD. The distributor or supplier may still incur liability on other grounds
such as fault. The same is true for other parties that are not the producer, such as purely
117
See supra, section 2.2.5.
118
Pub. EC C 114/4; Van Wees, 2015, section 3.3; De Vey Mestdagh and Lubbers, 2015, p. 275, Van Eijck and
Van Dijck, 2015, section 3.2.
119
See Alheit, 2001 and Vihul, 2014.
120
This is different for companies like Google that use the hardware (the chassis, sensors, etc.) to test and use
the software that has been developed by them. These are producers of the final product (the CAV) and will
incur liability as such under the PLD.
121
Article 3 (3) of the PLD.
122
CJEU 10 January 2006, case C-402/03, para. 29 and CJEU 21 December 2011, case C-495/10, para. 25.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 57
intellectual developers of the autonomous vehicle or its software (as mentioned above) and public
bodies. One can further think of rental companies. The latter category calls for a brief explanation.
Rental companies (or other service providers such a taxi companies). The class of liable persons
under the PLD does not extend to service providers, such as companies that would put
autonomous vehicles up for rent by consumers
123
or professionals. Rental companies may,
however, incur liability based on national liability for motor vehicles, special rules to transport
carriers liability or on the rental contract and related rules of contract law.
124
If service providers
have compensated the injured party, they may seek recourse vis-à-vis the producer.
Alternative grounds for liability of parties outside the scope of the PLD. The liability of
distributors and suppliers conforming to their information duty, and testing and rental
companies is generally fault-based. National courts will carefully balance both parties' interests
and particularly factors such as whether the injured party was exposed to an excessive danger,
whether the testing company knew or could have known that the autonomous vehicle did not
yet function as the 'perfect human driver', whether the injured party was informed of the technical
limitations of the vehicle, etcetera. Clearly, that will generally not be an easy route for the
aggrieved party. Only in specific cases there will be fault, for example if the rental company did
not yet have a permit or alike.
Some EU member states, such as the Netherlands and France, also have liability rules that are
risk-based. The Dutch Civil Code provides for civil liability to rest on 'the possessor of a movable
thing, of which it is known that it may cause a particular danger for people and property, provided it does
not meet the standards which in the circumstances may be set for such equipment'.
125
Rental companies
will risk liability under this clause. This is secondary to the PLD; producer's liability comes first.
Article 1384 of the French Civil Code similarly imposes risk-based liability on possessors or
keepers of movable objects that cause harm to others.
2.2.4 Defectiveness and new technologies
Measures as to the level of safety. According to the PLD a product is defective if it 'does not offer
the safety that a person is entitled to expect, considering all the circumstances'.
126
This calls for an
objective test, having regard to the reasonable expectations of the public at large.
127
Article 6 (1)
rules that an assessment must be made of inter alia the presentation of the product, the reasonably
expected use of the product and the time when it was put into circulation. The CJEU has also
mentioned other factors for this assessment, namely: 'the intended purpose, the objective
characteristics and properties of the product in question and the specific requirements of the group of users
for whom the product is intended'.
128
The mere fact that afterwards a better product has been brought
on the market does not constitute defectiveness. Relevant factors are the product's advantages
and downfalls and also the availability of alternatives. However, in some countries it is
123
Van Dam, 2013, p. 427.
124
See infra, section 2.4.
125
Article 173 of Book 6 of the Dutch Civil Code.
126
Article 6 of the PLD.
127
CJEU March 5, 2015 in joined cases C-503/13 and C-504/13, para. 37.
128
Id., para. 38.

European Added Value Assessment
PE 615.635 58
considered inappropriate to outweigh the social benefits of the product in relation to its risks.
National interpretations thus appear to be different as to whether these objective and social
factors can be included.
129
What may the public expect in terms of the safety and functioning of autonomous vehicles? A
distinction is made between three categories of defects:
1. Manufacturing defects. These defects are in the vehicle (or its components) and present an
anomaly, which makes them depart from the intended design. For example: malfunctioning
sensors or an incidental brake failure.
2. Information defects. Producers must provide users with all the information necessary to keep
and use it safely. This includes the user's manual with instructions and warnings concerning
its (possible) side-effects, also on the display. Information defects are particularly relevant for
autonomous vehicles, given their high-technology. They must be repeated if need be.
Producers must take into account that the driver/operator may easily forget instructions and
that he may also underestimate the risks. Additional appearance on the display in the vehicle
can be necessary to remind the operator once behind the wheel.
130
Credible advertisements
that make it appear as if no more caution of the operator is needed may also constitute
defectiveness.
131
3. Design defects. These defects are in the product design, which typically involves numerous
vehicles or 'an entire line of automobiles'.
132
For example: autonomous vehicles with too limited
testing scenarios or with an acceleration defect.
The answer to the question above is generally least difficult to give for the first category of defects.
In the absence of special warnings, consumers may expect the motor vehicle to be free of
manufacturing defects. They cannot expect it to be 100 percent free from design and instruction
defects,
133
, unless 'promised' by the producer. The expectations of autonomous vehicles
concerning their safety are currently quite high. Yet, the expectations are technology-based,
whereas technology is constantly up for improvements. It is for the industry to actively 'correct'
unrealistic expectations. If producers have not taken on responsibility to do this, then, in legal
terms, these expectations may determine the safety standard. The producer must inform
consumers properly of the possible side-effects: frequently, by adequate means (in the user
manual and on the vehicle display), using understandable wording/signs, and alike. But
warnings and instructions do not automatically exonerate the producer of liability for vehicles
that are unsafe in certain circumstances. The product design must, regardless of the information
given, meet consumers' reasonable safety expectations.
When are consumers' safety expectations of autonomous vehicles 'reasonable'? It has been
asserted that operators may expect their autonomous vehicle at least to drive as the 'perfect'
human driver. This would mean that the vehicle is defective if for example at the SAE automation-
level 5
134
it causes a collision by making an emergency stop for a newspaper flying on the road,
129
Lovell's report, 2003, p. 48; Jones Day, 2012, p. 2 of the Chapter concerning the UK.
130
Van Wees, 2015, section 3.2, with the example of warnings against low sun.
131
Gasser, Arzt, Ayoubi, a.o., 2013, p. 20.
132
Funkhouser, 2013, p. 449.
133
Van Dam, 2013, p. 431 and Van Wees, 2015, section 3.4.
134
See supra, section 1.7.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 59
similar to how it would have stopped for a concrete block.
135
What 'reasonable' entails will need
to be clarified by the courts, however, case-by-case, after the roll-out.
Degree of proof; specificity. Since quite some time, there have been concerns that representatives
of consumer(s) experience practical problems in terms of not having the means and information
to prove defectiveness, particularly for technical products and complicated injuries.
136
One of the
main challenges for autonomous vehicles is to determine the required safety standard for this
new technology. To what extent may consumers expect safety beyond the standard of the perfect
human driver?
137
There is no uncertainty if a radar sensor was not properly installed according
to specification.
138
But specifically having to prove that the operating software was defective, may
easily create problems and leads to uncertainty for consumers.
This lack of clarity is further complicated by the diversity of laws within the community. EU
member states give different interpretations of 'defectiveness', both in their country and
compared to one another. And they will also be different as to how far the claimant must go to
prove the defectiveness.
139
It is clear though, that consumers do not need to prove a high degree
of specificity in this respect. As held by the High Court of Justice in the UK, the claimant will 'not
have to specify or identify with accuracy or precision the defect in the product he seeks to establish, and
thus prove. It is enough for a claimant to prove the existence of a defect in broad or general terms, such as
'a defect in the electrics of the Lexus (motor car)'.'
140
Even so, one must have an understanding of the
cause of damage and the technique used as well as the risks involved, possible alternatives,
etcetera. That may be quite difficult for any 'outsider', as is known from cases involving
conventional vehicles: claimants encounter problems delivering proof of defects.
141
For some
specific cases, consumers are further helped in certain ways. The CJEU has ruled that 'where it is
found that products belonging to the same group or forming part of the same production series, such as
pacemakers (...), have a potential defect, such a product may be classified as defective without there being
any need to establish that the product has such a defect'.
142
The CJEU argues it is consistent with the
objectives pursued by the EU legislature to ensure 'a fair apportionment of the risks inherent in
modern technological production between the injured person and the producer'.
143
At the practical level,
detection technology such as an 'event data recorder' may offer relief, especially if made
mandatory. But this raises privacy-related questions that will be treated in Chapter 4.
135
Van Wees, 2015, section 3.4.
136
Lovell's report, 2003, p. 47.
137
Aside from the situation in which the producer allows or even promotes (through advertisements and
alike) overly high expectations of autonomous vehicles to exist.
138
Funkhouser, 2013, p. 453.
139
Cf. Lovell's Report, 2003, pp. 48-49.
140
Hufford v Samsung Electronics (UK) Ltd. [2014] EWHC 2956 (Technology & Construction Court), para. 25,
with reference to Ide v ATB Sales Ltd. & Lexus Financial Services v Russell [2008] PIQR P13; [2008] EWCA Civ
424.
141
EC COM(2006) 496 final, Third report on the application of the PLD. Cf. Lesley Anne McGlinchey v General
Motors UK Ltd. [2012] CSIH 91, WL 6774476 : was the movement within the handbrake grip affecting the
position of the pawl due to a defective design or had it been worn and disengaged?
142
CJEU March 5, 2015 in joined cases C-503/13 and C-504/13, para. 41.
143
CJEU March 5, 2015 in joined cases C-503/13 and C-504/13, para. 42.

European Added Value Assessment
PE 615.635 60
Norms and standards for defectiveness. Even if technical expertise is present, the most intricate
question to answer is what level of safety may be expected of autonomous vehicles from a
normative point of view.
Firstly, how secure must software be? The 'reasonable expectation-test' will be a serious obstacle
for software vulnerabilities that cause autonomous vehicles to malfunction. An often heard
statement is that: 'defect free software is an illusion and no customer can expect any complex software
products to be flawless.'
144
However, case-law may well determine that in the specific context of
autonomous vehicles a higher degree of safety expectations is reasonable. The subsequent
question is who bears responsibility for bugs that only appear after-the-fact and that were not
and could not be detected. For example, if the laptop of the mechanic in the garage appears to
have a 'new', unknown bug that infects the software of the autonomous vehicle under repair; is
that software (and the vehicle) defective? If it is, can producers avoid liability by invoking the
development risks defence?
Secondly, when are programming choices considered to be unacceptable, so as to qualify as a
defect of the vehicle? For example, is an autonomous vehicle deemed to be defective for the sole
reason that its software is set-up in such a way that it slams on the brakes to avoid an accident
with a toddler who runs across the street in front of it?
145
Decisions as to what level of risk is
acceptable are based on normative judgments, but courts may lack expertise to determine the legal
standard for such high-tech products
146
(limited to certain periods of time, in which certain levels
of technological knowledge were available and certain practices were common within the
branche). The court may hear experts about this and form its judgment on that basis, but that will
be a costly and slippery route to follow, surrounded by legal uncertainty.
2.2.5 Defences under the PLD
Limited list. Based on Article 7 of the PLD, several defences can be invoked by the producer.
These may relieve him entirely from liability. The producer shall not be liable, in the words of the
Directive, 'if he proves:
a. that he did not put the product into circulation; or
b. that, having regard to the circumstances, it is probable that the defect which caused the damage did not
exist at the time when the product was put into circulation by him or that this defect came into being
afterwards; or
c. that the product was neither manufactured by him for sale or any form of distribution for economic
purpose nor manufactured or distributed by him in the course of his business; or
d. that the defect is due to compliance of the product with mandatory regulations issued by the public
authorities; or
e. that the state of scientific and technical knowledge at the time when he put the product into circulation
was not such as to enable the existence of the defect to be discovered; or
f. in the case of a manufacturer of a component, that the defect is attributable to the design of the product
in which the component has been fitted or to the instructions given by the manufacturer of the product'.
The defences mentioned under a, d and e call for close interpretation. The legal defence under a is
especially relevant for companies that develop and/or test (the software for) autonomous
144
Råman, p. 417.
145
Example given by Funkhouser, 2013, p. 454.
146
Cf. Råman, p. 436.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 61
vehicles. They will be excused from liability if they have not put the vehicle (or its software) into
circulation. They could be held liable on another ground for liability, which in most countries will
come down to fault-based liability.
The defences mentioned at d and e show characteristics of a 'lack of fault' defence. The defence as
mentioned under d depends on the technical public law regulations, most of which are currently
still being developed or are yet in the future. The defence mentioned at e ('development risks'
defence) is an optional defence, but only a few countries (Finland and Luxembourg and Norway
from the European Economic Area) have left it out. In some countries it has only been excluded
for some types of products (especially pharmaceutical). In the majority of countries, the
development risks defence will be highly relevant for connected autonomous vehicles. The CJEU
interprets it strictly: the producer must prove that, taking into account all of the available scientific
and technical knowledge, it was impossible for him to discover the risk. Common practice to put
vehicles with a particular safety standard on the market does not disculpate the producer.
Decisive is the objective knowledge that producers are presumed to have at 'the most advanced
level and not restricted to the relevant industrial sector',
147
provided it was accessible to the
producer.
148
There are in fact only a few cases in which the development risks-defence has been
accepted.
149
The CJEU rejects the defence if the existence of a general defect was known or if the
producer should have been aware of the generic risk based on the accessible information, despite
the fact that the producer did not know in which particular product that risk might appear and
despite the fact that the known risk was unavoidable in a specific product.
150
How exactly the development risks-defence will be interpreted for autonomous vehicles is
uncertain. The objective knowledge can, for instance, be asserted by testimonies in expert circles,
and must be assessed by the professional standards at the time of marketing. But lawmakers will,
in their interpretation of the law and its application to the facts, also consider policy arguments.
For example, in the sense that a strict interpretation of this defence may have 'chilling' effects on
innovation.
151
Subsequently, we expect this defence to be a serious route to block claims for
technological risks of autonomous vehicles yet to be discovered. It may take several decades or
longer to discover all the actual risks presented by the use of autonomous vehicles. Future
uncertainties are inevitable and the possibilities for testing autonomous vehicles are limited.
152
If
these inevitable technological future uncertainties befall the individual injured party, then that
could, perhaps, have an impact on the consumers' confidence in the product.
Victim's own sphere of risk. Contributory negligence of the aggrieved party himself may also be
raised for a defence. This will reduce liability pro rata. The injured driver/operator of the defective
motor vehicle may not have followed instructions or may not have taken it for maintenance,
etcetera. This is for the producer to prove. This defence, again, raises questions as to the exact
standard of care that can be expected of the owner and especially of the driver/operator. Will the
standard be adjusted to consumers who are not fully accustomed to these vehicles? For example,
147
CJEU May 29, 1997, case C-300/95, ECR 1997, I-2649, Commission v UK, paras. 26-27.
148
Id., para. 28. See, more elaborate, Van Dam, 2013, p. 435.
149
CJEU May 29, 1997, case C-300/95, ECR 1997, I-2649, Commission v UK; cf. European Commission, 2006,
p. 11; Van Dam, 2013, p. 435.
150
A v National Blood Authority [2001] 3 All ER 289.
151
A.o.: Shears, 2007; Colonna, 2012; Schellekens, 2015.
152
Rand reports, 2014 and 2016b.

European Added Value Assessment
PE 615.635 62
could one say that the driver of the Tesla S in the accident described in Chapter 1,
153
was
contributory negligent for (allegedly) not holding on to the steering wheel against Tesla's
repeated instructions? Or is this a risk that must be borne fully by the producer?
2.2.6 Other causes of action (outside the PLD-scope)
For claims concerning the defectiveness of a product, the PLD provides for so-called 'total' or
'maximum' harmonisation. It allows the EU member states to maintain fault liability rules,
contractual and non-contractual, applicable to producers.
154
The Member States are free to create
or to keep other national liability rules for producers, but only to the extent that these rest on fault
or another ground for liability than risk-based liability for defective products (such as knowingly
withholding information or a too limited testing of the product). Also permitted is a 'specific
scheme limited to a given sector of production',
155
but this only sees to liability regimes that already
existed prior to the PLD. Thus, there is no room for a new liability rule for the defectiveness of
autonomous vehicles.
The PLD allows actions based on fault liability of the producer. Generally, such clauses exist in
the EU member states, in addition to contractual claims that consumers may have. Each country
has its legal requirements.
156
The consumer may derive safety duties from (the national
implementation of) the General Product Safety Directive (2001).
157
2.2.7 External defendants; joint liability
Article 5 of the PLD holds that if two or more parties are liable for the same damage under the
Directive, then they are 'jointly and severally' liable. This means that the consumer can seek full
liability from either one of the parties, regardless of what their share or role was in causing the
damage. The consumer may choose to sue either one of the parties or all. It is left to the national
law of the member states to determine whether the paying parties have the right to recourse
(reimbursement) by the other liable parties. Is the producer of the autonomous vehicle entitled to
full reimbursement from a software developer, arguing that the accident was caused by an error
in the software? Or should he bear part of the damages because he chose to fit it in the vehicle
and took profits from the end-product?
What if external parties are liable on other grounds than the PLD? Article 8 (1) determines liability
of the producer shall not be reduced 'when the damage is caused both by a defect in the product and by
the act or omission of a third party'. The injured party chooses to claim compensation from the driver
153
Supra, section 1.1.
154
Article 13 of the Product Liability Directive holds that the Directive 'shall not affect any rights which an
injured person may have according to the rules of the law of contractual or non-contractual liability or a special liability
system existing at the moment when this Directive is notified'.
155
CJEU April 25, 2002, case C-154/00, ECR 2002, p. I-03879, paras. 17-19. See further CJEU April 25, 2002,
case C-183/00, ECR 2002, p. I-03901.
156
Cf. the Lovell's report, 2003, p. 16ff.
157
Directive 2001/95/EC of the European Parliament and the Council of 3 December 2001 on general
product safety, OJ January 15, 2002, L 11, pp. 4-17, repealing as from January 15, 2004, Council Directive
92/59/EEC of 29 June 1992 on general product safety (OJ August 11, 1992, L 228, p. 24), and as amended by
EC Regulation 765/2008 of 9 July 2008 (OJ August 13, 2008, L 218, p. 30), and EC Regulation 596/2009 of 18
June 2009 (OJ July 18, 2009, L 188, p. 14).

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 63
or operator of the autonomous vehicle or hackers. The manner in which the right of contribution
or recourse is regulated is again left to the member states.
2.3 Back to the six scenarios
Several challenges were identified above that parties will encounter if the rules on product
liability are applied to autonomous vehicles. Below, the working of this regime will be
investigated at the concrete level of six scenarios. The aim is to get a better understanding of how
the PLD works for autonomous vehicles. Therefore, each scenario will not be worked out in detail
or with the purpose of completeness. This paragraph will focus on producers as the liable party,
as the focus of this chapter is on the PLD and its meaning and challenges in these scenarios.
Bearing this in mind, the following can be said.
Scenario 1 – The failing sensor
The first scenario involved the driver/operator of an autonomous vehicle, who suffered damage
from one of its sensors that had not detected a sudden lane closure. Following the PLD, he may
sue the automotive producer or the hardware producer (or another component maker), assumed
that these are two different parties. His right to compensation will depend on the reason for the
sensor to miss the lane closure. Was the sensor malfunctioning (or 'defective'), for example by not
being properly installed? If the claimant can argue defectiveness, then the producer may escape
liability based on one of the enumerated defences. For example, the producer may argue
convincingly (and can prove if need be) that the sensor has in fact failed due to the normal 'wear
and tear' or due to a bad repair by the garage only after it was put into circulation.
158
Or the
producer may show that the state-of-the-art was such, that the defect could never have been
detected before the vehicle was put in circulation. But national interpretations may differ.
Further, damage to the defective vehicle is not recoverable following the PLD, only on a fault
basis. Other kinds of property damage are protected if these exceed 500 Euro. If the claimant has
obtained compensation from the vehicle maker, the latter may seek reimbursement from the
hardware maker (if that is another company). This is left to national law to decide.
159
Scenario 2 – Sudden interruption of the software
The second scenario involves malfunctioning of the software (undefinable symbols appear on the
display). It is yet uncertain if software can be qualified as a product. But the more intricate
question is whether an unexpected interruption of the operating software will make it 'defective'.
Clearly, if such interruptions happen on a large scale, affecting a large number of vehicles with
the same software or production series, this will point to defectiveness. But if the software
interruption only affected the vehicle in this individual case, the 'reasonable expectation test' calls
for a careful balance to be made. Users may not expect software in general to be without
interruptions. On the other hand, as concerns the software of their motor vehicle the
'reasonableness' standard may be higher than it is for regular software in private computers and
alike. In our estimation, it will be 'reasonable' for consumers to at least expect a back-up system
that in principle protects them against malfunctioning software. Nevertheless, inherent to the use
of software is that it will have flaws, weaknesses or vulnerabilities and that not all of these will
exist or may be detected at the moment of production or during (and immediately after) updates.
158
Article 7 (b) of the PLD.
159
Article 5 of the PLD.

European Added Value Assessment
PE 615.635 64
The development risks-defence may entail that in the cases where there is defectiveness, the
scientific technical knowledge was not such, as to prevent this particular disruption or to detect
it prior to its market launch (and its updates).
One might further argue that the defect was in the vehicle. The vehicle was defective for not
responding in a safer way to the software interruption (with a safety back-up). The claimant
would then have to direct his claim solely to the producer of the vehicle, not to the software
producer. For other aspects, see scenario 1 above.
Scenario 3 – Unavailability of wireless network frustrates download
The situation may be different in scenario 3, where the wireless telecom network is unavailable
and, contractually, was not part of the package offered by the producer. If the latter has committed
to responsibility for the wireless connection of the vehicle, its unavailability will in principal fall
within the producer's sphere of risk. But if being connected was not an integral part of the
'package' offered by the producer, the question will be whether the vehicle can be regarded as
'defective'. In other words: may the group of users reasonably have expected it to have a back-up
system for network lapses, and/or that the user be warned in time and perhaps even that the
vehicle would automatically stop and park at an appropriate place? This matter is for domestic
courts (or the CJEU) to decide, and is too uncertain to predict, although in our view, this would
have 'good cards' to be qualified as 'reasonable'.
If the vehicle is 'defective' for reasons as those that were just given, then liability of its producer
will not be limited by the mere argument that the telecom provider is (also) liable for the network
lapse.
160
For other aspects, the case is similar to scenarios 1 and 2, as discussed above.
Scenario 4 – Driver/operator neglects instructions
In scenario 4, the damage was caused by the fact that the driver/operator has violated the
instructions in the user guide or manual. For product liability to arise here, again, defectiveness
must be proven by the injured party. Dependent on more facts than were given, there could be
an information defect: did the producer provide instructions that were adequate, clear,
unambiguous, repeated, etcetera? The autonomous vehicle may have an information defect
and/or a design defect if it is not equipped with a system that gives adequate and repeated timely
warnings and the technology to intervene at the right point if the driver/operator remains
passive. If there is defectiveness (but this does not immediately appear to be the scenario as
sketched), then the producer can raise a contributory negligence defence, by arguing that the user
was at fault.
161
The fact that the driver/operator has ignored instructions may be qualified as
contributory negligence (and limit or even exclude the producer's liability). This can limit or,
dependent on each particular national law system, even exclude the producer's liability. For other
aspects, see scenario 1 above.
Scenario 5 – Hacking of software by third parties
The fifth scenario concerns hacking of the operating software of the vehicle. This case raises
questions as to the programming of the software (or software updates), used in the vehicle. As
motor vehicles are (and will be) made more autonomous and connected, it seems reasonable of
160
Article 8 (1) of the PLD.
161
Article 8 (2) of the PLD.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 65
users to expect adequate protection from the producer. The technology used (which for vehicles
currently on the market includes internet-connected entertainment systems and radio's) must of
course be protected against hacking attacks and malware, also in the form of periodic updates.
Drivers/operators of the motor vehicle must further be adequately warned of the risks and other
knowledge that the producer may have and that can be shared, and recalls must be made, if need
be. But such equipment could also be installed in the vehicle and functioning as should be, while
the vehicle was nevertheless hacked. The user may, again, not expect 100 percent safety and the
development-risks-defence may excuse the producer from liability. This makes the outcome of
these hypotheticals uncertain and heavily reliant on expert testimonies. This could even be made
more complex, as will appear in Chapter 4, if the vehicle was hacked through the
driver/operator's own mobile device or alike. For other aspects, see scenario 1 above.
Scenario 6 – Injuring a pedestrian when trying to avoid a house
The sixth scenario asks whether the producer must bear responsibility for the fact that the
autonomous vehicle has severely injured a pedestrian, as it tried to avoid hitting a house. The
central question is whether this is a design defect: should the vehicle have prioritised to avoid
hitting the pedestrian instead of to avoid hitting the house (and consequently injuring persons in
the house). If this programming choice would qualify as defective, the producer might invoke the
development-risks defence.
162
2.4 Possible constraints, gaps and regulatory challenges
The preceding sections pointed to various challenges and constraints of the PLD, in its current
form and substance, if applied to autonomous vehicles. Five key areas will briefly be outlined.
The first main point above was that several parties responsible for the creation and/or the making
and testing of autonomous vehicles are not covered by the risk-based liability imposed by the
PLD. Mere testing companies can raise the defence of not having put the vehicle into circulation.
The status of software producers is not entirely clear, but most signals point in the direction that
the operating software in autonomous vehicles can be seen both as a product and as a component.
However, presenting it as a product means that, for the claim to succeed, the consumer must
show its defectiveness. That may be impossible for consumers to put their finger on (see below).
To qualify the software as a component part of the autonomous vehicle means that the software
producer can only be held liable for 'manufacturing defects'.
Secondly, the question is when a product, being either the software or the autonomous vehicle as
such, can be qualified as 'defective'. Surely, this is difficult on the practical level of being able to point
to technological failure. Although the CJEU has made it clear that to establish 'defectiveness' no
high-technical specificity is involved, difficulties can even be expected on the general level of
pointing to any malfunctioning. In any case, technical knowledge and expertise will be
imperative. The onus of proof lies primarily with the injured party and may easily be problematic:
the consumer must show that the defectiveness was already present at the moment the vehicle
left the factory gates. This can even be difficult for manufacturing defects, as the producer may
be convincing in his claim that these could also be due to wear and tear. But more importantly, all
this involves a normative judgment: what level of safety and what level of testing are expected of
the producer and at which level is the vehicle unsafe and its design deemed to be defective? The
162
Supra, section 2.2.5: the defence mentioned at e in the list.

European Added Value Assessment
PE 615.635 66
exact levels of safety that may be expected are not at all clear and thus surrounded by legal
uncertainty.
It is also far from clear whether more fundamental factors may play a role here.
163
Is the (on
average) increased level of road safety of autonomous vehicles included in the assessment of
whether its design is 'defective'? For information given, it needs to be clarified what this means
in respect of the risks presented by this new technology, more particularly the software that these
cars run by: what risks should the instruction manual warn against, what steps are there to take
for drivers/operators? If, for example, the software is being hacked and the producer had signs
of the concrete risk that this might happen (but could not stop it), does this make the software
'defective'?
Thirdly, particularly the 'compliance risk' defence and optional 'development risks'-defence (in
the majority of countries that allow the latter defence) call for a careful balancing of the
consumers' protection interest versus innovation. Both defences may lead to the result that
injured parties bear the cost of risks scientifically unknown at the time of production. On the other
hand, abolishing these defences altogether may have 'chilling effects' on the particular industry.
The same can be said for the contributory negligence defence: liability of the producer may be
limited or excluded if the injured person himself was at fault. Typical examples are that the
driver/operator continued to use software of which he knew or ought to have known that it was
malfunctioning. But, in a way, users are 'guinea pigs' in this development: knowledge about the
risks or the impact of certain user modes will only be gained from using the vehicle and both
consumers and the industry will learn from casualties. Given this reality, and the need for a
steady balance between protection and innovation, what level of knowledge and anticipation can
be expected from both?
Fourthly, the scope of protection of the PLD is limited, especially with regard to property damage.
Damage to the autonomous vehicle itself is excluded from this risk-based liability, which means
that the owner of the vehicle must invoke the national rules on fault-based liability (and thus
prove fault) in order to receive compensation for the damage caused to his vehicle. Other kinds
of property damage are limited to property for private use, and only compensated if the damage
exceeds 500 Euro.
164
This may call for reconsideration as motor vehicles are becoming more and
more autonomous and connected. The trend to autotomise motor vehicles may make them safer
(i.e. it reduces the occurrence of accidents), but the high level of technology and connectedness
will easily make the repair costs and/or lost value higher than for traditional vehicles.
Fifthly, the six scenarios as sketched in this report are illustrative of how limited the PLD is in
this context. Sensors and software will always malfunction as a result of the normal 'wear and
tear' and other parties' interventions (vandalism, bad repair) and telecom network will cause new
risks. It is not realistic to expect producers to be able to anticipate on all this, nor are they able to
produce materials incapable of degradation or free of vulnerabilities or of user's errors.
163
See also Palmerini, E., Azzarri, F. and Battaglia, F., et al. 2014.
164
Article 9 of the PLD.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 67
2.5 Conclusion
Representatives of both producers and consumers are, on the average, satisfied with the PLD and
how it works.
165
Yet the analysis above raised a number of constraints and gaps, particularly for
the injured party.
First and foremost is the limited reach and meaning of product liability as a compensation
mechanism for damage caused by autonomous vehicles. The legal standard for product liability
is that the vehicle was not doing what can be reasonably expected of it by its user group.
Generally, it will not be 'reasonable' to expect a perfect product. Even with back-up systems and
other forms of protection, the dependence of software and high-tech operation systems on a large
scale, will always have technology vulnerabilities. And the safety level will be measured
according to the standards as they were, at the time of production. Defects that, at the time of
production, were scientifically unknown or undetectable or that have only arisen after the market
launch or complied with regulations at the time of production are, in principle,
166
excluded from
compensation following the PLD. The law, therefore, does not expect the producer to be a
frontrunner in safety risks not yet commonly found in the branch at that time. Therefore, in fact,
the cost of risks that are not consequential to the production itself and the cost of scientifically unknown
risks will be borne by injured parties (and by their social and private insurance carriers). This may
not be perceived as a secure or fair system and might reduce consumers' confidence in
autonomous vehicles.
On the practical side, evidentiary burdens and a lack of information may seriously impede
adequate protection as the requirement of defectiveness and (many of) the available defences call
for factual, technological and scientific knowledge that consumers will typically not have. For
example, the producer will escape liability if it is 'probable' that the defect occurred after the
product was brought on the market. But can it be proven when the defect has occurred?
Especially for defects in the software, this may be difficult to rebut.
Further, not just factual uncertainty but also legal uncertainty increases the legal cost and
procedural risk of claim handling and may be a barrier to innovation. One often heard, yet rather
small, point of uncertainty, is whether software is deemed a 'product' under the Product Liability
Directive. A large majority of authors argue that it is, although formally it was not yet decided.
More intricate uncertainties include the question what technical and design problems may be
qualified as 'defects', whether 'mere' choices as to how the vehicle responds may qualify as a
defect and how high the legal standard for safety is. These issues are also relevant to determine
the division of responsibility if the producer seeks reimbursement from the software developer
for certain program choices or weaknesses in the software.
These points of legal uncertainty are further complicated by legal diversity amongst the member
states concerning the level of proof that they ask of the consumer to prove the defectiveness, the
available defences for producers, and possible monetary caps. Also, the level of compensation
varies significantly within the EU. This may lead to different degrees of internalising the cost of
accidents in the price of autonomous vehicles, which could, in theory, ultimately frustrate the
internal market for these vehicles. But this is not certain. That may explain why the argument did
not gain much weight in the political arena, when it was made for defective products in general.
165
This was already noted in the Lovell's report, 2003, pp. 46-47 but it also seems to have been confirmed in
the Rand-study parallel to this current report.
166
An exception must be made for those (few) countries that do not allow the development risks-defence
(as it is optional). See supra, section 2.2.5.

European Added Value Assessment
PE 615.635 68
Less apparent, at first sight, is the limited list of liable persons under the PLD. In theory liability
befalls not only car manufacturers, but also component makers, importers and distributors, but
its actual width is much more limited. De facto excluded are: (a) component producers in respect
of design or information defects of the vehicle, (b) distributors/sellers of the vehicle who have
provided the injured party with 'track-and-trace' information, (c) pure developers of technology
and/or testing companies (not using their brand or putting the vehicles on the market), and (d)
rental companies or other service providers such as taxi companies.
Despite these constraints and gaps, product liability does offer a solution for single-vehicle
accidents. For example, the driver or operator of an autonomous vehicle who sustains personal
injuries after it bumps into the crash barrier can claim damages vis-à-vis the producer. He may
also be entitled to payments on the basis of voluntary insurance or objective insurance (as in
Sweden) and may then use the product liability-route for the uninsured part of his damage.
Lastly, traffic victims on the average may receive willingness from the industry to find agreement
to settle their cases out-of-court, as a way for it to take responsibility for the technological
uncertainties, to avoid reputational damage and perhaps strengthen consumers' confidence. But
it would be a serious miscalculation to think that liability for autonomous vehicles will almost
exclusively befall the industry. To what extent product liability will cause a shift in liability,
depends, in particular, on the national rules on traffic liability. These will now be explore and
evaluated, in order to understand their applicability, constraints and gaps for autonomous
vehicles.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 69
3. The current traffic liability rules applied to CAVs
3.1 Introduction; why claimants will prefer traffic liability over the PLD
In the last two sections, serious constraints and challenges were found to exist within the EEA, if
victims of autonomous vehicles pursue a product liability claim. Autonomous vehicles and their
operating software will inevitably have shortcomings, but it is unclear when these will be
qualified as 'defects' – both from a technical and a normative point of view. The risk that operating
software has shortcomings that could not scientifically be discovered before its roll-out will thus
generally be borne by the consumer.
167
Moreover, the PLD provides no remedy for defects of the
vehicle after the time of production (due to 'wear and tear', weather conditions, vandalism or bad
repair). In these cases, victims must rely on other grounds to pursue a claim for damages, such as
traffic liability.
Also regardless of the PLD, traffic victims may 'naturally' be inclined to primarily direct their
claim for damages towards the party who was actually involved in their traffic accident. Damage
suffered by the driver and passengers of motor vehicles is in many countries, to some extent,
covered by voluntary private insurance.
168
But to the extent that damage of passengers and
damage of other traffic victims, is uninsured, it can be more practical for victims to invoke traffic
liability rules, rather than to claim compensation from the producer. Emanating from the Fifth
EU Directive on motor insurance,
169
the risk of liability for motor vehicles 'normally based' in EU
member states is covered by mandatory liability insurance. CAVs are captured by its definition
of 'vehicle' in Article 1. EU (and EEA) wide,
170
this means that the risk that CAVs cause damage
to others than the driver/user, keeper or owner of the vehicle is covered by mandatory insurance
for minimum insured sums, periodically indexed, ranging currently, roughly spoken, from
1.220.000 Euro per victim to 6.070.000 Euro per claim.
171
In some member states the insured sum
is not limited to a certain Euro-amount.
The system upheld by the motor insurance directives has the advantage that the liable party will
have a deep pocket as damages will be paid through insurance. Financial strength can of course,
in principle, also be expected from producers (the automotive industry) as the liable party, if
claimants pursue product liability-claims, although liability insurance is not compulsory for
producers. But the Motor Insurance Directive (MID) offers other practical advantages in the form
of 'claimant-friendly' insurance rules, such as an action directe (right of action) vis-à-vis the third-
party motor insurer of the liable party,
172
information rights and the right to proceed before a
court in their country. Also, these are minimum standards only, whereas the substantive rules of
167
Except in the few member states that have not opted for the development-risks defence; supra, section
2.2.5.
168
Albert, 2008, p. 320. In the Netherlands per 1 January 2017 through no-fault insurance.
169
EU Directive 2009/103/EC, relating to insurance against civil liability in respect of the use of motor vehicles, and
the enforcement of the obligation to insure against such liability, which repeals the earlier Directives on liability
motor insurance (Directives 72/166/EEC; 84/5/EEC; 88/357/EEC and 90/232/EEC and 2000/26/EEC
2005/14). Hereafter: Motor Insurance Directive.
170
Liability insurance for motor vehicles is made mandatory within the European Economic Area (EEA) and
is thus not limited to the EU but also mandatory in Norway, Liechtenstein and Iceland.
171
Article 9 and Communication from the Commission 10.5.2016, COM(2016), 246 final.
172
Article 18 of the Fifth Motor Insurance Directive; see Engelhard and Koudstaal, 2014, pp. 471ff.

European Added Value Assessment
PE 615.635 70
the PLD entail total harmonisation. Thus, member states may choose to make motor insurance
more protective than prescribed by the MID.
Yet, the substantive traffic liability rules have not been harmonised
173
and vary between member
states – from a very protective risk-based liability (France) to fault liability (the UK). In Sweden,
traffic victims have an insurance claim on a 'no-fault' basis, irrespective of personal liability of the
owner or driver of the motor vehicle. These legal differences give in fact quite different outcomes.
This means that the insured risk of motor liability insurance is assessed differently within the EU.
Ultimately, the question whether traffic liability offers claimants a more beneficial route to
compensation than product liability, depends on each country's traffic liability rules. One must
be careful, drawing conclusions from comparisons of the national rules on traffic liability. Many
of these rules offer no, or limited, protection to drivers and to owners of motor vehicles who suffer
damage. But these victims are often protected by voluntary insurance,
174
on a no-fault basis. Then
again, the insurance coverage is usually limited, and a product liability claim may still be relevant
for the part of the damage that is uninsured.
Hereinafter, an assessment will be made of how the substantive traffic liability rules could be
applied to cases that involve accidents with autonomous vehicles (section 3.2) and to the central
six scenarios as presented in Chapter 1 (section 3.3). The constraints, gaps and regulatory
challenges as found will be presented (section 3.4), followed by the conclusion (section 3.5).
3.2 Comparative overview of national traffic liability rules applied to CAVS
Can substantive rules on traffic liability that currently exist within the EU, be applied to cases
involving autonomous motor vehicles and are there points of concern? Three systems of traffic
liability will be explored in the following sections, to find answers to that question: fault-based
personal liability (section 3.2.1), risk-based personal liability (section 3.2.2) and the Swedish
insurance model of objective no-fault liability (section 3.2.3).
3.2.1 Claims for damages against the driver or 'operator':
175
fault-based
In far most European countries,
176
drivers of motorised vehicles can only be liable for damage of
other traffic members if the driver was personally at fault. In some of these countries, such as
Britain and Malta, this is (currently)
177
the only ground to claim damages for traffic accidents.
Other countries also impose risk-based liability on owners/keepers of motor vehicles. 'Fault', as
a legal concept, means: wrongful behaviour for which the person who has caused damage can
173
CJEU 23 October 2012, no. C-300/10; the Motor Insurance Directives do not regard substantive national
traffic liability, they only see to the insurance coverage, cf. a.o. CJEU 14 September 2000, no. C-348/98, Jur.
2000, p. I-6711, Mendes Ferreira and Delgado Correia Ferreira, paras. 23 and 29.
174
Albert, 2008, p. 112.
175
Depending on the level of autonomy of the autonomous vehicle, it may be more appropriate to refer to
the 'operator' (or 'user') instead of the 'driver' of the vehicle: full autonomy indicates that there would be
hardly any 'driving' involved anymore.
176
This includes German law, although it has a legal presumption of fault of the driver. The exceptions include
France (where risk-based liability is imposed on both drivers and keepers of the motor vehicle) and Sweden
(an insurance system for personal harm, which will be treated separately).
177
For the UK a legislative proposal is currently pending, see infra, section 3.2.3.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 71
legally be blamed. The technology in the vehicle is meant to replace the human driver.
Subsequently, risk-based laws (see section 3.2.2) seem to be more in line with this technological
development than law systems that solely rely on fault as the basis for liability of the
driver/operator of the autonomous vehicle.
Fault liability will remain mostly relevant for vehicles at SAE automation-levels 1 to 4.
178
An
example can be derived of the Tesla case that was described in section 1.1, assuming that another
party than the user himself would suffer damage. At SAE automation-levels 5 and 6,
179
there could
be fault liability of the operator of the vehicle, but this will, on the average of cases, be exceptional.
Examples may include the operator's omission to update the vehicle's control system, using it
under special circumstances in which one could foresee that it might cause damage (extreme
weather conditions or driving in crowded places),
180
or even: taking the chance that the vehicle
becomes more vulnerable to hacking. The requirement of personal (human) fault will, from the
injured party's point of view, be more difficult to grasp as motor vehicles become more
autonomous and connected. Logically, as the autonomy (and connectivity) of vehicles increases,
the objective possibility that human behaviour contributes to the accident will generally
decrease.
181
Consequently, fault liability of operators (drivers) of autonomous vehicles will then
play a much less significant role on the average than it does currently, for damage caused by
conventional drivers.
182
In national law systems that have no additional risk-based liability for
motor vehicles and that rely only on personal fault, victims are more likely to pursue a claim for
damages based on product liability.
A crucial question for fault-based liability will be: to what extent may drivers and operators of
autonomous vehicles rely on the hardware and software technology of their vehicle in cases
where it fails on them? And more generally, how 'strict' must the fault requirement be applied in
cases concerning the use of autonomous vehicles?
In several member states, the current case law expects drivers of conventional motor vehicles to
be an experienced driver, even if the individual driver of a motor vehicle in reality was not
experienced.
183
This objective approach requires rethinking for autonomous vehicles, as their
users will generally not be familiar with these new technologies and continuous streams of
information, such as electronic horizon (eHorizon).
184
. To the extent that the driver or operator of
an autonomous vehicle does not follow instructions, the law could maintain the high level of care
('the perfect user') as is currently found in many national traffic liability regimes within the EU
for drivers of conventional motor vehicles. Some circumstances will put strict interpretations of
what constitutes 'fault' to the test: what if the driver or operator of an autonomous vehicle is
confronted with software that is not responding or that misinterprets signals or entirely misses
them, for instance those of a traffic manager? To the extent that users of autonomous vehicles
with high or full automation do not have actual control of the car, the current duties of care will
lose relevance and new, judge-made duties of care must be created.
178
See supra, section 1.3.
179
Supra, section 1.3.
180
Tjong Tjin Tai and Boesten, 2016, p. 660.
181
Van Wees, 2015.
182
A fatality with a Tesla Model S, on 7 September 2016, appeared to have been caused while its driver did
not use the AutoPilot and was, allegedly, speeding, which caused the vehicle to crash and damaged its main
battery, resulting in a short-circuit and overheating and eventually fire.
183
Cf. Court of Appeal 30 June 1971, [1971] EWCA Civ 6, 2 QB 691.
184
Aon Risk Solutions, 2015, p. 5.

European Added Value Assessment
PE 615.635 72
But not only personal fault as such calls for rethinking, also the division of responsibility between
various parties involved may be an issue. An illustrative case concerns a recent fatality in the
Netherlands with a Tesla Model S, on 7 September 2016. According to the media, this was caused
while its driver did not use the AutoPilot and was speeding. Allegedly, this caused the vehicle to
crash and damaged its main battery, resulting in a short-circuit and overheating and eventually
fire. Suppose now, that rescuers would be electrocuted in their attempt to free the driver from the
vehicle. Could that be attributed to the latter and/or to Tesla for (alleged) defectiveness, or to
both parties?
Other legal attribution complexities may arise in the context of the innovative technique of 'truck
platooning': 'a number of trucks equipped with state-of-the-art driving support systems – one closely
following the other. This forms a platoon with the trucks driven by smart technology, and mutually
communicating.'
185
Assuming all trucks profit from the lower fuel consumption, how fair is it to
hold the driver of the first truck, who is in charge of speed and steering, liable for damage of the
third truck in the column behind him?
186
These examples also illustrate another difficulty in most
of the national traffic liability laws EU-wide: causation. It will not be easy for injured parties to
show that new (connected) technologies incorporated in autonomous vehicles or new forms of
using it, were in fact the cause of their damage.
So far is clear, the new automotive technologies will generate a number of legal and factual
questions and uncertainties such as those aforementioned. These will be faced in all EU member
states, to the extent that they rely on fault liability. If these are left to the creation of case-law by
courts, particularly national courts under national fault rules, it seems safe to predict a
considerable period of legal uncertainty, resulting in legal transaction costs and 'gaps' in terms of
adequate protection of traffic victims.
3.2.2 Claims for damages against the owner/keeper: risk-based
In addition to fault liability of the driver, a number of EU member states impose risk-based
liability on the owner, possessor and/or keeper of conventional motor vehicles that cause damage
to another person. In his capacity as owner, possessor or keeper of the motor vehicle, he must carry the
risk that the motor vehicle causes damage, regardless of his (or the driver's) personal conduct or
blameworthiness. Technical defects of the motor vehicle are typically regarded as being part of
the risks borne by its owner, possessor and/or keeper.
187
If the motor vehicle causes damage,
whether due to technical defects or to the person driving it (aside from specific circumstances
such as joyriding or theft), its owner, possessor and/or keeper is in principle liable. Below, several
national regimes of risk-based liability will be explored.
Two particular gaps and challenges in national regimes of risk-based liability for motor vehicles
can already be considered in advance here, for the coming of autonomous vehicles.
The first gap builds on the discussion above: many risk-based liability regimes exclude (or: limit
the protection of) the driver and the owner/possessor/keeper of conventional motor vehicles, if
these parties suffer damage themselves. In the Netherlands injured passengers of motor vehicles
are also excluded from risk-based liability for motor vehicles, but this has recently been
185
https://www.eutruckplatooning.com/About/default.aspx.
186
AonRisk Solutions, 2015, p. 6.
187
This can be seen in the countries under review that have a strict liability for motor vehicles: Germany, the
Netherlands, Belgium and France (and similarly in Sweden).

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 73
compromised by insurers.
188
'Motorised' victims are less protected than other traffic members;
they have to base their claim for damages on fault liability (or call in voluntary insurance of the
car owner or themselves). This is based on the fact that using a motor vehicle creates Betriebsgefahr:
the danger inherent to mass and speed. But if it would appear that autonomous vehicles in fact
decrease the accident rate, as is expected, it could be more appropriate to offer 'motorised' victims
similar protection as non-motorised victims. One might argue that using any motorised vehicle,
even CAVs, will negatively impact the seriousness of the harm, once it does come to an accident,
compared to other, non-motorised forms of transport. Even then, national legislators may want
to reconsider the fact that the rules for risk-based liability currently treat the injured driver of a
motor vehicle different from injured passengers of that same motor vehicle. In cases of (almost)
full automation (SAE-levels 4 and 5), the 'driver' will not have a much different role to play in the
vehicle than other passengers in the vehicle. Why should he be treated any less favourable?
The second point relates to the fact that rules on risk-based liability for motor vehicles differ from
country to country. These rules vary as to whether, how and to what extent defects of the vehicle
and human conduct are relevant circumstances to avoid risk-based liability of its owner,
possessor or keeper (next to other national differences with regard to the scope of protected
persons and heads of damage and the level of compensation).
189
In some countries, the owner,
possessor or keeper of a motor vehicle may avoid liability with a force majeure defence whereas in
other countries the same circumstances do not have that effect. If the cost of liability is off-set in
the price (or in other ways passed onto the consumer), this price effect will vary with the
particular national rules at hand.
Both points made above, call for a closer discussion of national risk-based liability systems,
varying from quite absolute systems, in which fault hardly plays any role anymore, to mixed
systems, that are risk-based but that still use fault elements. Below, the discussion will start with
personal liability for motor vehicles that is almost similar to insurance, as currently exists in
France.
France. French law has adopted an almost absolute liability for keepers of motor vehicles in the
so-called Loi Badinter.
190
The keeper is liable vis-à-vis all traffic members (non-motorised and
motorised), with the exception of the driver of his motor vehicle (if the latter was another person
than the keeper). If the victim was the driver of another motor vehicle, the keeper is automatically
liable, but he may avoid liability by proving that he or the driver of his motor vehicle was not at
fault (fault liability with a reversed burden of proof). Other victims (pedestrians, cyclists,
passengers) profit from an even more favourable risk-based liability. These victims must only
claim and, if needed, prove that they suffer damage from a traffic accident and that the motor
vehicle was directly 'involved' in that accident. Mere involvement (implication) will suffice; a
causal role between the operation of the motor vehicle is not necessary to establish strict liability
under the Loi Badinter. This is intended to relieve victims of causality issues.
188
Per 1 January 2017 the Dutch Association of Insurers has declared that liability motor insurers shall
compensate passengers of the insured motor vehicle on a no-fault basis.
189
See supra, section 3.4.
190
Loi de 5. Juillet 1985, tendant à l'amélioration de la situation des victimes d'accidents de la circulation et à
l'accélération des procédures d'indemnisation.

European Added Value Assessment
PE 615.635 74
The available defences under the Loi Badinter are limited. Absence of fault, an external cause or
Act of God are not valid defences. Moreover, the contributory negligence defence is limited if the
victim was non-motorised or a passenger: he only loses his claim if he intentionally got hurt or
committed an 'inexcusable fault' which was the exclusive cause of the accident. The faute
inexcusable defence cannot be raised by law if the victim was, at the time of the accident, younger
than 16, older than 70 or disabled over 80 percent. For property damage, the traditional
contributory negligence defence applies: the victim's right to compensation will be limited in
accordance with his own contribution to the damage. In 2005 it was proposed to extend the
victim-friendly approach regarding contributory negligence to the injured driver,
191
but this has
not been followed up by the legislator.
This regime of risk-based traffic liability, in its current form, could equally to autonomous motor
vehicles. Mere involvement (implication) of the vehicle is the necessary ingredient to establish
liability; this would avoid causation issues as mentioned above. The French model seems most
fit at levels 5 and 6, as it also protects the user (driver). It does not allow the keeper of the
autonomous vehicle to raise an Act of God (or external cause) defence, for example by arguing
that the vehicle had lost its telecom connection. In less strict systems, as exist in Germany and the
Netherlands for example,
192
such no-fault defences are allowed, different from France (and
Belgium and Sweden, see below). But these defences will only be successful in certain
circumstances as there is a high standard of care for the driver: the owner, possessor or keeper of
the motor vehicle can avoid liability if the accident was caused by external circumstances (e.g.
weather, third parties or a deer on the road). These must have been unforeseeable and
unavoidable to the driver. The latter may also invoke the contributory negligence defence, which
can reduce the amount of compensation or even exclude the risk-based liability for motor vehicles
altogether.
Germany. The German legislator currently considers the need for amendments to its liability law
and this is being discussed in round tables sessions initiated by the German Transportation
Ministry.
193
However, as new laws have not yet been initiated, the producer and other parties
such as the owner or keeper of the motor vehicle will risk liability under the general rules of civil
liability law. Section 7 of the Road Traffic Act (Strassenverkehrsgesetz vom 19 Dezember 1958, StVG)
holds the keeper of a motor vehicle liable for its 'operational risk' (Betriebsgefahr), both if the risk
has materialised from a driving error or from a technical defect. In itself, this may equally be
applied to autonomous vehicles.
194
Different from France and Belgium, the keeper of the motor
vehicle can avoid liability by proving an external cause (höhere Gewalt): this means an
unforeseeable and unavoidable external cause of the traffic accident, such as extreme weather
conditions or the intervention of a third party.
195
Damage related to personal injuries, death and
191
See Avant project de réforme du droit des obligations (Articles 1101 à 1386 du Code civil) et du droit de la
prescription (Articles 2234 à 2281 du Code civil), www.justice.gouv.fr/art_pix/RAPPORT
CATALASEPTEMBRE2005.pdf.
192
Other countries that are said to follow this route (strict liability for motor vehicles) are Czech Republic,
Estonia, Greece, Hungary, Lithuania, Poland, Slovenia, Slovakia, and Spain, see Albert, 2008, pp. 98-99.
193
Norton Rose Fullbright Whitepaper, July 2016, p. 45.
194
Gasser, Arzt and Ayoubi, 2013, p. 18.
195
Van Dam, 2013, p. 412.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 75
property damage are equally protected by the Strassenverkehrsgesetz, but the amount of
compensation is limited to maximum sums.
196
One justification ground for this risk-allocation to the keeper of the motor vehicle is that,
generally spoken, motor vehicles create the risk of mass and speed (Betriebsgefahr), to which other
traffic members are exposed. This risk is still present in autonomous vehicles, although the
accident rate is expected to drop significantly in time. Other justifications are that the keeper
profits from the use of his vehicle and has 'the power to decide for what purposes and at what times
the vehicle may be used'. These justification grounds are said to also apply to autonomous vehicles
with the result that the keeper would still be liable under this clause for damage caused by the
automation of his vehicle.
197
Section 18 of the StVG holds the driver liable on the basis of a rebuttable presumption of fault. It
has been asserted that this last section is less appropriate for vehicles with a high level or even
full automation but that 'this does not result in a legally unsolvable situation, because the driver still has
the option to provide proof of exoneration'.
198
The Netherlands. According to Article 185 of the Dutch Road Traffic Act (Wegenverkeerswet 1994),
the owner and the keeper of a motor vehicle are liable for damage caused to non-motorised
persons and objects not being a motor vehicle. Different from German law, passengers are not
protected by this risk-based liability, which must be reconsidered for autonomous vehicles. A
point of similarity between Dutch and German law is that risk-based liability is imposed
regardless of the cause of the accident and that it covers both driving errors and technical defects
of the motor vehicle. In the absence of legislative intervention, of which there are currently no
concrete signals, this provision will apply to autonomous vehicles.
199
For conventional motor vehicles, it has been established in case law that the owner or keeper, in
the absence of gross negligence or intent of the non-motorised victim, is in principle always liable
for at least 50 percent of the damage.
200
'In principle', because the owner or keeper of the motor
vehicle may convince the court that there was an 'unforeseeable and unavoidable'
201
external
cause of the accident (such as extreme weather conditions). However, for non-motorised victims
who were under the age of fourteen years old at the time of the accident, the owner/keeper
cannot avoid liability by proving an external cause. For these minors, the owner or keeper is fully
liable, unless there was gross negligence or intent of the victim (the child).
202
These rules are all
judge-made and are referred to as the '50 percent rule' and the '100 percent rule'. These rules apply
equally to damage related to personal injuries and death and to property damage of the non-
motorised victim.
196
A maximum capital of around 300,000 Euro for damage to the person, see section 12 StVG. Beyond that
amount, the claimant can invoke the rules on fault liability.
197
Gasser, Arzt and Ayoubi, 2013, p. 19.
198
Gasser, Arzt and Ayoubi, 2013, p. 19.
199
Vellinga, 2014; Tjong Tjin Tai and Boesten, 2016.
200
HR 28 February 1992, NJ 1993, 566 IZA/Vrerink (as interpreted by later case-law).
201
HR 22 May 1992, NJ 1992, 527 ABP/Winterthur.
202
HR 1 June 1990, NJ 1991, 720 Ingrid Kolkman (no contributory negligence defence); HR 31 May 1991, NJ
1991, 721 Marbeth van Uitregt (no 'external cause' defence).

European Added Value Assessment
PE 615.635 76
It appears from the overview above, that various national differences exist as to the availability
and interpretation of fault-based defences to avoid the strict liability for motor vehicles (external
cause, Act of God, force majeure and contributory negligence). Other national differences exist,
inter alia, in respect of the kinds of damage: not all national regimes of risk-based liability for
motor vehicles (fully) protect property damage and the meaning of heads of damage and what
they may include, let alone the assessment and/or calculation of the damage, differ widely.
Furthermore, serious national differences exist as to the categories of protected victims. For
example, in the Netherlands non-motorised traffic members benefit exclusively from risk-based
liability for motor vehicles, whereas passengers are included in Germany and France (and
Belgium and Sweden, see below). France even includes victims that were the driver of another
motor vehicle than the motor vehicle under the third-party insurance, with a reversed burden of
proof regarding fault. German and Dutch law (and also Belgium, see below) exclude any driver
of a motor vehicle from this risk-based liability for motor vehicles.
3.2.3 Claims for damages against the no-fault insurer: objective liability
Within the EU the victim can obtain compensation directly through the liability insurance which
rests on the motor vehicle. In the risk-based liability systems as discussed above (French, German
and Dutch law), this means that the traffic victim can obtain compensation from the liability
motor insurer regardless of fault. But these risk-based rules are based on personal liability: the
keeper of the motor vehicle or his liability insurer can still invoke defences to escape liability. One
step further towards improving victims' right to recovery is to make the insurer's obligation to
pay compensation more objective: independent of personal liability. Examples of objective liability
can be found in Belgium, Sweden and in a legislative proposal specifically designed for
autonomous vehicles currently pending in the UK. These will be discussed below.
Belgium. The Belgian Deputy prime minister and minister of Employment, Economy and
Consumer Affairs, in charge of Foreign Trade declared recently that, in the near future, a special
working group on Liability Insurance of the advisory Commission for Consumer Safety will
consider whether legislation for the responsibility and insurance of self-driving vehicles would
be feasible.
203
He also asserted that until then, the current liability regime will govern accidents
caused by automated vehicles. The current traffic liability ruling is Article 29bis of the 'Code
concerning mandatory liability insurance for motor vehicles' (Wet betreffende de verplichte
aansprakelijkheidsverzekering inzake motorrijtuigen, WAM-wet). Art. 29bis was created in 1995 in the
context of the need to reduce social insurance payments: this insurance system would not just
benefit the injured party; it would also relieve his social insurance carrier. Medical costs caused
by motorised traffic would then, ultimately, not be borne by the social insurance carriers, but
instead by the liability motor insurer.
204
Art. 29bis was directly inspired by the French model: it too introduced a direct obligation for the
motor liability insurer to pay compensation to victims of traffic accidents in which the insured
motor vehicle was (merely) 'involved'. Absence of fault, an external cause or Act of God is not a
valid defence. Belgian law offers this special protection solely for damage consequential to
203
Answer to question 7 of a Member of Parliament, Questions et réponses écrites 2016-2017, 30 November
2016, 4th session of the 54th legislative period, p. 126.
204
Gedrukte Stukken, 1993/94, nr. 980/no. 3 (Verslag Aarts), p. 16; Engelhard, 1998, p. 23.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 77
personal injuries and death of the victim. Property damage is not protected with the exception of
the victim's cloths.
From the victim's perspective, art. 29bis is even more favourable than French law if the victim
was non-motorised (pedestrians, cyclists) or a passenger who claims personal injuries: his fault
(contributory negligence) does not take away or reduce liability in any way, unless the victim has
acted intentionally (for example to commit suicide).
205
On the other hand, it is narrower than the
French Loi Badinter: Article 29bis excludes all drivers of motor vehicles from the right to
compensation, also those from another motor vehicle than the one under the paying insurance.
Sweden. On 31 March 2017 a proposal was presented to the Minister for Infrastructure for the
regulation of trials using self-driving vehicles on roads. In this proposal it is stated that the current
laws on compensation for traffic accidents can be applied to all levels of automated vehicles.
206
In
Sweden, and for example (slightly different) Norway, a regime of no-fault insurance applies
which is not based on fault, nor even on risk or other forms of personal (human) liability, but on
solidarity. Under the Swedish Traffic Damage Act (Trafikskadelagen, 1975/1410), victims injured
by the operation of a motor vehicle can seek recovery from the liability-motor-insurance taken
out by its keeper. The right to recovery is directly based on the insurer's objective liability: it is
not dependent on personal responsibility of the driver or owner, possessor or keeper of the motor
vehicle. Liability has been transferred from the owner, possessor or driver of the vehicle, onto his
liability insurer. In Sweden, the rules on fault-based liability can still be invoked, at the victim's
choice, but in practice this option is hardly ever used.
Although this is similar to the French and Belgian system of 'automatic compensation', as
discussed above, the latter have kept more characteristics of the adversarial model: the liability
insurer of the liable party may raise defences that contest the facts, for example by claiming that
the accident was caused by inexcusable fault of the claimant himself. The Swedish insurance
model rests, as said, on a community basis: the principle that all traffic members equally have the
right to compensation for damage related to personal injury or death caused by motor vehicles.
This explains why it differs from countries with personal, risk-based liability with regard to: (a)
contributory negligence, and (b) the legal position of drivers of motor vehicles who suffer
damage.
207
(a) In cases of contributory negligence (the injured party's own fault), the right to compensation
is only reduced with 'usually' 30 to 50 percent
208
, and even no reduction at all for income losses,
unless the accident was caused by the injured party's intent or gross negligence or through drunk-
driving in combination with negligent driving.
(b) Different from the other countries, the Swedish Traffic Damage Act equally protects motorised
and non-motorised traffic victims. Both have a direct right to compensation against the insurer:
it is the insurer's liability, not the insured's personal liability that is the basis of the claim for
compensation. This is based on the social believe that the injured party 'should not regard the
motorist responsible for the accident or anyone else as his adversary as far as compensation is concerned'.
209
205
Engelhard, 1998, p. 38ff and p. 47; cf. Van Dam, 2013.
206
Vägen till självkörande fordon – försöksverksamhet, Stockholm 2016.
207
Köhler, 1997, p. 71.
208
Köhler, 1997, p. 71.
209
Hellner, 2001, p. 257.

European Added Value Assessment
PE 615.635 78
Rather, traffic victims should 'turn to the insurer as the party that handle[s] the administration of the
compensation system'.
In cases where two or more motor vehicles are concerned, non-motorised victims may choose to
whom they direct their claim. The risk of personal injury or death of motorised victims (the driver
and passengers) is covered by the liability motor insurer of their motor vehicle. The latter has a
right to reimbursement against the liability insurer of another party who was at fault or, if the
latter cannot be identified or is uninsured, against the Guarantee Fund. Most remarkably, and
different from other EU member states, drivers are even entitled to compensation if theirs was
the only motor vehicle involved in the accident (single-vehicle accidents). In academic writings it
is admitted, that this right to recovery of the driver against his own liability motor insurer is
inconsistent: one cannot be liable towards himself.
210
Nevertheless, it is upheld based on the
argument 'that the driver is as much in need of insurance protection as anyone else injured by motor
traffic'.
211
The Swedish experience, prior to the existing law, was that the level of protection
offered by the voluntary insurance for drivers 'was not sufficient for cases of serious injury'.
212
Both pecuniary and non-pecuniary damage related to personal injury or death fall directly under
the liability motor insurance that rests on the motor vehicle. This is, however, supplementary to
the highly developed social insurance, which lies at the basis of personal injury compensation.
213
To the extent that victims (also) suffer property damage (car, bicycle, cell phone, etc.), they must
bring an action for damages based on fault liability. However, their right to compensation is then
not limited by their own contributory fault. Following the Tort Damages Act (Skadeståndslagen,
1972), the right to compensation can only be reduced by the victim's intent or gross negligence.
214
If the traffic accident has led to medical disability or death, the liability motor insurer must
request a recommendation (non-binding advice) from an impartial body, albeit maintained and
financed by liability insurers, the Road Traffic Injuries Commission (Trafikskadenämden).
United Kingdom. Currently the UK is a frontrunner in initiating legislation that introduces a
special compensation system for damage resulting from accidents with autonomous vehicles. On
22 February 2017 a special legislative proposal was laid before the UK House of Commons that,
in addition to less relevant issues here such as electric driving and aviation, seeks to address
liability for fully autonomous (driverless) motor vehicles. According to this proposal,
215
the
liability motor insurer incurs liability for the damage that results from an accident 'caused by an
automated vehicle when driving itself' if 'an insured person or any other person suffers damage as a result
of the accident'. For certain motor vehicles for which there is no liability insurance, because these
are owned by public bodies or alike, the proposal shifts liability onto the owner (the public body).
The liability insurer is only liable for death, personal injury and – very limited – to property
damage: the property damage does not include damage to the automated motor vehicle, nor, inter
alia, property in the custody or under the control of the insured person.
210
Hellner, 2001, p. 258.
211
Ibid.
212
Ibid.
213
Hellner, 1988, p. 17. I.e. to the extent that it is not already covered by social insurance or another insurance.
214
Hellner, 2001, p. 255.
215
Subsection 2 (1) of Part 1 of the (proposed) Vehicle Technology and Aviation Bill of 22 February 2017
currently laid before the UK Parliament.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 79
Interestingly, the contributory negligence defence will, according to this proposal, not be applied
any different than in regular cases. This means that the claim for compensation of the injured
person is limited in accordance with his own contribution to the accident or to the damage. To
this extent, this proposed UK bill still has characteristics of personal responsibility: the victim's
own contribution to the accident will limit his entitlement to obtain compensation. Thus, the
proposed UK bill offers less protection than French, Belgian and Dutch traffic liability law do
(and is, to this extent, similar to traditional fault-based liability for motorised traffic in the UK).
Furthermore, subsection 4 of the proposed bill allows liability insurers to exclude or limit their
liability in their policies (thus contractually) against an insured person if the latter has failed to
install software updates or has made alterations to the vehicle's operating system that were
prohibited under the policy.
Also important to note is that, according to this proposed bill, liability of the insurer (or in some
cases the vehicle owner) 'does not affect any other person's liability in respect of the accident'.
216
Subsection 5 ensures that the liability insurer has a right of action against 'any other person liable
to the injured party in respect of the accident'. This will entitle the liability insurer to seek
repayment from the producer, in cases of defectiveness, or from other traffic members who were
at fault.
3.3 Back to the six scenarios
Below, the aforementioned law systems will be applied to the six scenarios as described in
Chapter 1. The focus will be on the main results, the scenarios will not be worked out in detail.
Further, the discussion will exclusively focus on traffic liability and its meaning and relevance for
each of these scenarios.
Scenario 1 – The failing sensor
The first scenario concerns the malfunctioning of one of the sensors of an autonomous vehicle,
due to which a sudden lane closure was not properly detected, causing the car to slip. It was
argued that a product liability claim will depend on whether the sensor was defective at the time
of production, which necessitates the parties to gain knowledge in respect of the precise cause of
the malfunctioning. If the producer is able to show that it was caused by the normal 'wear and
tear' or that the malfunctioning is due to a risk that could not have been discovered at the time of
production, the product liability-route will not lead to compensation.
But to whom can the damage be allocated if the victim's personal injuries claim is based on
liability for traffic accidents? If the driver/operator himself suffers damage, there will, with the
exception of Sweden, not be special protection. He could only obtain compensation from the car
owner or his liability insurer (e.g. if the owner has allowed a relative or a friend to use his car), if
there is personal fault. In the Swedish model as well as in the proposed 'Vehicle Technology and
Aviation Bill' pending in the UK, drivers receive automatic compensation from the liability
insurance that rests on their motor vehicle, even in single-vehicle accidents. Motorised victims
hold the same position as other traffic victims do.
In countries that impose risk-based liability on the owner/keeper of a motor vehicle, only non-
motorised traffic members are protected, and in France and Germany also passengers. In Germany
and the Netherlands, the owner or keeper may avoid liability by proving an 'external cause'. In
216
Subsection 2 (7) of Part 1 of the (proposed) Vehicle Technology and Aviation Bill.

European Added Value Assessment
PE 615.635 80
Belgium, France and Sweden he will not have such defences to his avail. However, defects of the
motor vehicle will often not bar liability. In countries with a mere fault-based traffic liability, such
as currently the UK and Malta, victims will not be entitled to compensation, unless they can prove
fault.
Scenario 2 – Sudden interruption of the software
The second scenario is only different from the former to the extent, that it is not one of the sensors,
but instant malfunctioning of the software (undefinable symptoms on the driver's or operator's
display) that causes the autonomous vehicle to slip. It was argued in the context of product
liability, that the software producer and the producer of the vehicle may contest the defectiveness
and can possibly raise the development risks defence. As for traffic liability, this scenario will
have different outcomes throughout the EU. Countries that exclusively have fault-based liability,
such as (currently) the UK and Malta, will not impose liability on the driver/operator or owner
of the autonomous vehicle, unless he must have been aware of this risk and could have prevented
it. The onus of proof is on the injured party.
In countries that impose a risk-based liability on the owner, possessor or keeper of the
autonomous vehicle, with the exception of Sweden, the scope of protection is limited to specific
categories of victims: non-motorised traffic members and, in some countries, passengers. See
scenario 1. As argued, some of these countries may allow the defence of external cause, but this
often does not include defects of the motor vehicle. Whether the sudden interruption of the
vehicle's software will be treated as such, is yet uncertain. In Sweden and the UK's legislative
proposal all victims will in principle receive compensation. But this proposal allows the insurance
carrier to use contract clauses that exclude or limit liability if the insured person has failed to
update the software or alike.
Scenario 3 – Unavailability of wireless network frustrates download
In the third scenario, the autonomous vehicle is unable to obtain data regarding unplanned
construction works. The producer will be liable if 'being connected' is part of the package offered
by him or if there is defectiveness in any way, for example in the absence of a back-up system.
Traffic liability law will produce very different results within the EU. Under Swedish law and the
UK's legislative proposal, all traffic members are entitled to compensation vis-à-vis the motor
insurance in this scenario. In the other countries under review victims will have a much less
favourable position, for two reasons. First, the victim-driver/operator does not receive equal
protection compared to other traffic members. In fact, in the other countries under review
(including currently the UK), he does not fall within the scope of protection of risk-based liability
for motor vehicles.
217
Other traffic members can invoke risk-based liability for motor vehicles
(except currently in the UK), but Germany and the Netherlands
218
allow the keeper to escape
liability based on the defence of external cause (provided the network lapse was unforeseeable
and unavoidable for the driver/operator of his autonomous vehicle).
Scenario 4 – Driver/operator neglects instructions
217
The French Loi Badinter does impose liability on the keeper of a motor vehicle against the victim-driver of
another motor vehicle, but only if the latter was not at fault himself.
218
Exceptions are Sweden, France and Belgium.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 81
In scenario four, the driver/operator of the autonomous vehicle did not follow the vehicle
instructions properly. This could lead to a product liability claim if there was a defect, for example
an information defect; even then, damages could be reduced on the basis of contributory
negligence.
In France, Sweden and the UK's legislative proposal that is currently pending, the
driver/operator in this scenario will be entitled to full compensation. The fact that he has
neglected instructions will not limit his claim, albeit the UK's proposal allows insurers to use
contract terms to the contrary (see scenario 2). In all other law systems under review (including
currently in the UK), he will have to prove that another traffic member was at fault, which is not
apparent from the scenario as sketched.
219
Even then, his right to compensation could be reduced
for the fact that he has neglected the instructions.
Scenario 5 – Hacking of software by third parties
Scenario five concerns the 'hacking' of the programming software of the autonomous vehicle by
third parties. The producer would incur liability if there is defectiveness in any way, for example
in the absence of a back-up system. Claims based on traffic liability will produce outcomes very
similar to those as were indicated for scenario 3. The UK's legislative proposal, in its current form,
would allow the insurance carrier to use contract clauses that exclude or limit liability if the
insured person has failed to update antivirus software and alike.
Scenario 6 – Injuring a pedestrian when trying to avoid a house
Scenario six presents a case in which the autonomous vehicle has severely injured a pedestrian
when it tried to avoid hitting a house. It was argued above, that this could constitute a design
defect, but could this scenario, aside from product liability, (also) give rise to traffic liability?
In all law systems under review except currently in the UK, the pedestrian will in principle be
entitled to compensation from the owner, possessor or keeper of the vehicle. In Germany and the
Netherlands, the latter can, in theory, escape liability based on an external cause defence, but
programming choices will most likely fall within their own sphere of risk. In the UK, as it
currently stands, the pedestrian would not be entitled to compensation from the user or car
owner, unless there was objective fault (e.g. if the user should have managed to regain control to
avoid the crash). That would depend on the factual circumstances of the case and the standard of
care demanded of the driver/operator, which is still uncertain.
3.4 Possible constraints, gaps and regulatory challenges
The discussion above, concretised in the six scenarios, points to three concerns. Firstly, it was
found that many national differences still exist between the liability rules for traffic accidents
within the EU. The UK currently only resorts to fault-based liability; other law systems are risk-
based. Both Sweden and the current legislative proposal for the UK offer direct insurance
payments based on objective liability. Belgium and France are similar, but exclude/limit the right
to compensation of the injured driver of a motor vehicle. German and Dutch law also exclude the
driver and for other traffic victims both law systems allow defences to avoid liability by proving
219
A few countries (the Netherlands, France) also have risk-based liability for 'dangerous objects', that would
cover, for example, bicycles that carry no light, etcetera.

European Added Value Assessment
PE 615.635 82
an Act of God, external cause or contributory negligence of the victim. Property damage receives
less protection. In the Netherlands all injured passengers are excluded from risk-based liability for
motor vehicles. Some countries limit the liability for motor vehicles to a maximum statutory
capital, whereas most others do not.
Secondly, particularly the risk-based law systems use concepts such as driver, passenger, owner,
possessor and keeper for important legal consequences: passengers are in most countries
protected by risk-based liability whereas drivers are not. This deserves reconsideration with the
coming of autonomous vehicles, dependent by whom exactly these vehicles will be owned or
kept in the future. Related to this, the exclusion of the victim-driver from the protection offered
by risk-based liability requires attention in light of the increased safety level introduced by
autonomous vehicles. Both the more traditional risk-based liability systems (Germany and the
Netherlands) and the 'insurance modelled' liability systems (France and Belgium) may want to
reconsider their limitations with regard to the driver-victim.
Thirdly, exclusively fault-based systems are ill-suited for autonomous vehicles at SAE
automation-level 3 and particularly at levels 4 and 5.
220
The role of the driver/operator changes
drastically and is reduced to a mere 'turning on and off' at levels 4 and 5. In the absence of human
activity, there can be no fault. At the very least, new standards of care must be developed.
Similarly, the more traditional risk-based traffic liability systems (Germany, the Netherlands)
seem ill-equipped for automation-level 3 and particularly the levels 4 and 5 as these systems still
use fault-based elements. A more revolutionary approach to find 'solutions', that is currently
debated, would be to attribute fault to the vehicle. But even then, it will be problematic for victims
to prove a causal link between (failure of) the technology of the vehicle and their damage. The
risk-based liability systems of France and Belgium relieve victims of the requirement of causality
as they refer to the motor vehicle's 'mere involvement'.
3.5 Conclusion
All in all, the following can be concluded. With the exception of Sweden, the national rules on
traffic liability are based on personal responsibility of the driver for driving the motor vehicle and
of the keeper for material defects in the vehicle (concerning its engine, brakes, etc.). However, the
central concepts of driver, owner and possessor must be critically reconsidered for their
applicability in cases involving autonomous vehicles. By whom will these vehicles be owned
and/or kept? To what extent is the user still in control? Particularly, if the current national rules
for risk-based liability are applied to these cases, these concepts are currently used as justification
grounds: the 'user' is, in the context of conventional vehicles, seen as the creator of risks and the
'driver' as the one being in control. In the context of autonomous vehicles, these roles, however,
will change, which makes these justification grounds for imposing liability less convincing:
autonomous vehicle are also seen as 'risk minimisers', although these too have a higher impact in
terms of damage than non-motorised vehicles. Dependent on the degree of automation, the
'driver' cannot automatically be treated as the one being in control.
For the risk-based national liability regimes for motor vehicles, this also calls for serious
rethinking of the current position of the driver-victim: drivers of motor vehicles, who suffer
damage, are generally excluded from risk-based liability for motor vehicles. Only in the Swedish
no-fault model they receive equal protection, compared to the protection of other traffic members.
220
See supra, section 1.3 for an overview of the SAE-levels of automation.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 83
Especially in cases of full automation, it will no longer be obvious to offer less protection to the
user of the vehicle than to other traffic members.
For the fault-based rules on traffic liability, particularly at the SAE levels 2 to 4 (limited
autonomous driving),
221
new judge-made duties of care will have to be created to assess the
driver's or operator's availability, monitoring and alertness to signals that he should resume
driving the vehicle in particular circumstances. These involve the question to what extent the
driver/operator may rely on hardware and software technology of his autonomous vehicle. Also
for fully autonomous vehicles, new duties of care will need to be developed for the operator and
for the owner/possessor/keeper, on the basis of which they or parties responsible for them (i.e.
their employer) may incur liability. Inevitably, countries in which liability is exclusively based
on fault (in the absence of risk-based liability), will not be able to offer satisfying solutions at
SAE-levels 4 and 5 (almost full and full automation).
222
A revolutionary approach to find
'solutions', that is currently debated, would be to attribute fault to the vehicle itself. That,
however, would still not relieve the victim of the difficulty of determining if and when there is
'fault', and the subsequent onus of proof, nor does it solve causality issues (viz. the question
whether the vehicle's alleged omission to respond differently was in fact the cause of the victim's
damage).
221
See supra, section 1.7.
222
See supra, section 1.3.

European Added Value Assessment
PE 615.635 84
4. Hacking and privacy issues
4.1 Introduction
This chapter focuses primarily on cases of hacking or cybercrime. Autonomous vehicles are
vulnerable to hacking, due to the fact that they rely heavily on software for their operation and,
as for CAVs, the fact that they are connected to each other through vehicle-to-vehicle
communication technology (hereinafter referred to as V2V), or to a larger infrastructure using
vehicle-to-infrastructure communication technology (hereinafter referred to as V2I). Clearly, this
has implications as to the liability for damage caused by hacked autonomous vehicles. This will
be discussed in the first part of this chapter.
Secondly, this chapter will pay attention to another, yet related issue, viz. data and the protection
of privacy. Autonomous vehicles will be equipped with software and hardware able to process
and store several forms of data and information, to collect this in black boxes and/or share it real-
time with road users and other third parties. Data generated, stored and communicated could
help in solving liability issues, for instance in determining the precise cause of accidents after
these have occurred, who was at fault, and who may be held responsible. Data and information
sharing technology could even prevent accidents from happening. Privacy of operators of
(connected and) autonomous vehicles and other citisens in the vicinity of those vehicles must,
however, be taken into account at all times. To what extent may personal data be processed using
autonomous vehicles under the current and forthcoming rules on personal data protection? And
what regulatory challenges lie ahead when data and information sharing technology will be
deployed in autonomous vehicles?
First, hacking will be discussed (section 4.2), followed by privacy issues (4.3) and the conclusion
(section 4.4).
4.2 Cyber liability and hacking of autonomous vehicles
4.2.1 Introduction
For the purposes of this research, hacking can be understood to include all activities in which
autonomous vehicles' technology is used in other ways than was intended by the producer.
223
Hacking can have problematic consequences. This can be seen, for example, in cases in which
third parties other than the producer, distributor or 'legitimate' operator (such as drivers, owners,
keepers and license holders) circumvent security measures and access the computer systems that
operate an autonomous motor vehicle, and/or the data gathered by, stored in and processed
through autonomous vehicles. Already, hackers have proven in practice that they are able to
break through the technological security measures currently implemented in cars, alter the
software and take over the vehicles' operation.
224
It is self-evident that when (connected and)
autonomous vehicles are being hacked into, and third parties become in control of their operation,
this may lead to accidents, and damage.
Civil liability for hacking in general is not harmonised in the EU. Under the national jurisdictions
of the member states a hacker may be held liable for the damage caused after hacking into
autonomous vehicles. However, since hackers often are highly skilled in the 'job', they may be
223
See a.o. Stallman, and http://cyber.laws.com/hacking.
224
See Greenberg, 2015.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 85
able to hide their tracks and be hard to identify and locate. It will therefore often be hard to
establish who is responsible and should be held liable for breaking into the vehicle's software.
Therefore, the following sections will explore which consequences third-party hacking of
autonomous vehicles may have for the liability position of producers in terms of the PLD, and
for operators of (connected and) autonomous vehicles (in the broad sense: drivers, license
holders, owners or keepers of the autonomous vehicle) in terms of specific national regimes
addressing liability for motor vehicles. A distinction is made between physical damage resulting
from hacking, and non-physical damage in the form of personal data breaches. Furthermore,
some suggestions will be posed to the European regulators in order to mitigate the identified
challenges.
4.2.2 Liability of the producers of hacked autonomous vehicles
Producers of autonomous vehicles can be liable for the damage resulting from defects of the
vehicle after they have put it into circulation. It was established in section 2.2 that autonomous
vehicles will generally fall under the scope of the PLD, but that it is questionable when these
vehicles are deemed not to provide the level of safety which the public may reasonably expect.
As for the risk of hacking, to a certain extent, it is accepted that software will always contain
certain faults (bugs), and that, while these bugs must be avoided as much as possible, a software
producer has ample opportunity to fight off a product liability claim based on the development
risks defence.
225
That is the case if the defect could not have been discovered taking all available
scientific and technical knowledge into account. Thus, it can be construed that autonomous
vehicles' software is defective when it contains bugs that could have been avoided which enabled
the hacking thereof; taking into account all relevant information present at the moment the
autonomous vehicle was marketed. The producer must then compensate damage following from
death, personal injury and, more limited, damage to goods. When an autonomous vehicle hack
for instance leads to an accident, the resulting material damage may have to be remunerated by
the producer of the autonomous vehicle.
The Data Protection Directive (hereinafter also referred to as DPD) and the new General
Regulation on Data Protection (hereinafter referred to as GDPR, which has been adopted by the
European Parliament and the Council in April 2016, and will likely enter into force in 2018,
226
by
then replacing the DPD) provide that controllers or processors can be held liable to compensate
both material and immaterial damage resulting from their infringement of the harmonised rules
as set forth.
227
Producers of (connected and) autonomous vehicles are controllers of personal data, when they
determine the purposes and the means of processing personal data, or processors when they
process personal data under the responsibility of a controller. When a controller or processor for
instance fails to take appropriate technical and organisational measures to protect the data from
being hacked into;
228
or when a system is hacked and this causes a personal data breach, fails to
notify the supervisory authority and/or the people whose data have been revealed by the hack,
229
225
See supra, section 2.2.5; ibid. Vihul, 2014, pp. 9-10 and Alheit, 2001, pp. 203-204.
226
See European Commission, 2015c and the final text of the GDPR can be accessed here: http://eur-
lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CONSIL:ST_5419_ 2016_ INIT, until publication in the
Official Journal of the European Union.
227
Article 82 (1) of the GDPR and Article 23 of the DPD.
228
Article 5 (1) (f) and Chapter IV (Article 24ff) on data security in the GDPR.
229
Article 33 of the GDPR.

European Added Value Assessment
PE 615.635 86
this may invoke his liability. When an autonomous vehicle-producer is however not a processor
or a controller in the sense of the DPD and GDPR, he cannot be held liable for damage resulting
from a personal data breach caused by a hack of the autonomous vehicle that he marketed.
4.2.3 Liability of operators of hacked autonomous vehicles
National law, again, determines whether the operator of an autonomous vehicle has the
obligation to install software (security) updates and whether, if he did not comply, he could be
held liable for the damage a hack causes. In general, under the national jurisdictions that have
installed risk-based liability of drivers (such as France) or of owners/keepers (such as France and
the Netherlands) for damage caused by their motor vehicles, it is likely that also damage caused
by third-party hacking of autonomous vehicles is included in the scope of the regimes. In order
to establish whether or not the operator of an autonomous vehicle can be held liable in the UK, it
must be assessed if, and to what extent, he has breached his duty of care in relation to taking
measures to prevent hacking.
When operators of autonomous vehicles qualify as controllers or processors of personal data,
they can be liable to compensate material and immaterial damage when they act in conflict with
the DPD or the GDPR. This will not often be the case, since they will be mostly using just their
own personal data for operating autonomous vehicles.
4.3 Issues concerning sharing of data and information
4.3.1 Introduction
CAVs are expected to be equipped with software and hardware able to process and store several
forms of data and information, to collect this in black boxes and share it, using V2V and/or V2I
technology. Traditional motor vehicles are often fitted with black boxes, which are also referred to
as event data recorders.
V2V technology connects vehicles to each other in a decentralised way, and shares car data such
as speed, acceleration and braking, vehicle location and other driving activity real time with other
road users. The same types of data can be shared using a centralised infrastructure through V2I
technology.
230
Based on vehicle data shared through V2I and/or V2V communication (hereinafter
referred to as V2X communication), motor vehicles can adapt their own driving behaviour. If, for
instance, a traffic incident happens, other vehicles on the road can be warned through V2X
communication, and cars fast approaching the incident location can be instructed to activate
emergency brakes. Furthermore, V2X communication may facilitate platooning (road trains,
where cars automatically follow a lead vehicle, see supra, section 3.2.1), which leads to reduced
fuel usage, less carbon dioxide emissions less congestion.
Benefits of CAVs equipped with event data recorders, and/or communicating through V2X
technology (hereinafter referred to as tracing technology, or TT) in terms of liability include the
following: logged vehicle and driving behaviour data could be used to help determining the
precise cause of accidents after these have occurred, who was at fault, and who may be held
responsible.
231
Moreover, V2X communication could even prevent accidents from happening by
sharing real-time information on the whereabouts of other autonomous vehicles on the roads.
Information privacy of CAV operators, drivers, owners, keepers, passengers and other citisens in
the vicinity of those vehicles must be taken into account when deploying tracing technology.
230
See for a concise typology Glielmo, 2011.
231
De Bruin, 2016. See supra, section 2.5.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 87
When TT-data are personal data in sense of European regulatory framework on data protection,
232
these must be stored and processed in conformity with current (strict) rules from inter alia the
DPD.
233
Even stricter forthcoming rules will become applicable in the EU after the GDPR has
come into force.
In the following sections, it will be (1) explored to what extent TT-data may be processed using
CAVs under the current and forthcoming EU data protection regime, and (2) which are the most
problematic regulatory challenges that lie ahead when tracing technology will be deployed by
autonomous vehicles in terms of stimulating innovation on the one hand, and facilitating societal
acceptance by protecting the privacy rights of citizens on the other hand.
234
4.3.2 Legal conditions for processing TT-data in the EU
4.3.2.1 Applicable legal framework
There are a number of harmonisation directives providing rules on information privacy of
citizens in the EU. Currently, the DPD forms the core of EU legislation on data protection.
Furthermore, the Directive on Privacy and Electronic Communications (DPEC)
235
is applicable,
however materially less relevant to be discussed into detail than provisions of the DPD. The DPD
and the DPEC have been implemented in national regimes of the member states.
As was already mentioned, the DPD will be replaced by the GDPR, which will likely enter into
force in 2018.
236
Therefore, primarily the DPD will be discussed in the next sections. References
are made to corresponding provisions of the GDPR. Some novelties in the GDPR applicable to
TT-data will be discussed.
4.3.2.2 TT-data, personal data?
'Any information relating to an identified or identifiable natural person'
237
is understood as personal
data in sense of the DPD and the GDPR. A person is identifiable when he can be identified, directly
or indirectly, 'in particular by reference to an identification number or to one or more factors specific to
his physical, physiological, mental, economic, cultural or social identity'.
238
The GDPR explicitly adds,
amongst other things, 'location data' to be included in the realm of personal data.
239
A distinction
is made between regular personal data, and special categories of personal data. The latter include
232
http://ec.europa.eu/justice/data-protection/law/index_en.htm, viewed 28 March 2016.
233
Directive 95/46/EC of the European Parliament and of the Council of 24 October 1995 on the protection
of individuals with regard to the processing of personal data and on the free movement of such data.
234
The text of the next sections is partly on the findings in De Bruin, 2016 (forthcoming). References to that
text will be made where necessary, and to sources used in that article accordingly.
235
Directive 2002/58/EC of the European Parliament and of the Council of 12 July 2002 concerning the
processing of personal data and the protection of privacy in the electronic communications sector, as
amended by Directive 2009/136/EC .
236
See European Commission 2015c, and the final text of the GDPR can be accessed here: http://eur-
lex.europa.eu/legal-content/EN/TXT/PDF/?uri=CONSIL:ST_5419_2016 _INIT, until publication in the
Official Journal of the European Union.
237
Article 3 (1) of the DPD; Article 4 (1) of the GDPR.
238
Article 2 (a) of the DPD.
239
Article 4 (1) of the GDPR.

European Added Value Assessment
PE 615.635 88
information revealing for example someone's race, ethnicity, political opinions, religion, health
and sex life.
240
Data gathered, processed and stored through TT will often in some way relate to a natural person.
Most technical data (such as motor behaviour, fuel use- and actuator data) fall outside the scope
of the privacy rules, while other forms qualify as personal data (describing the behaviour of the
driver). Most types of user introduced data will be personal data in sense of the DPD and the GDPR.
Also, when, for example, (audio)visual recordings are made in side or around the vehicle, from
which people can be recognised, these are personal data. Video recordings will even qualify as
special category data, as these reveal the race of the depicted persons.
241
Furthermore, location
data, indicating the whereabouts of the CAV and those transported inside the car can be personal
data. These do not directly represent a natural person. However, it can be construed that when
data from different sources are combined, for instance location data of the CAV on working days
between 8.00 and 8.30, plotting the route from Y (a house address) to Z (a certain office address),
these can identify the owner of a vehicle who happens to live at Y and work at Z, which qualifies
the location data as personal data.
242
The same applies for example to location data of a rental car,
which reveal the identity of the renter when combined with the rental company's customer
administration. When data cannot be related to a natural person, the EU framework on data
protection will not apply.
4.3.2.3 Controllers, processors and data subjects
The individuals, to which personal data relate, are defined as data subjects.
243
The drivers, keepers,
owners, passengers and all other people in the vicinity of autonomous vehicles, whose personal
data are gathered, processed and stored, are thus data subjects. Those who determine the
'purposes and the means of the processing of personal data' are controllers.
244
Processing is defined as
'any operation or set of operations which is performed upon personal data, whether or not by automatic
means'.
245
If the processing of personal data takes place by another party, on behalf of the
controller, that party is referred to as processor.
246
Producers of autonomous vehicles who incorporate tracing technologies in the vehicle, can be
controllers when they determine which (personal) data are processed, when and how these will
be stored, and under which conditions these data can be retrieved at a later stage. Third parties,
such as insurers using the TT-data to inter alia calculate insurance premiums, are also controllers.
When controllers use services of third parties in order to, for example, communicate and/or store
TT-data to enable V2X communication, the latter (third parties) are processors in sense of the
DPD and the GDPR.
240
Article 8 (1) of the DPD; Article 9 (1) of the GDPR.
241
See also Article 29 of the Data Protection Working Party 2007, p. 8.
242
This example was also illustrated in De Bruin, 2016.
243
Article 2 (a) of the DPD; Article 4 (1) of the GDPR.
244
Article 2 (d) of the DPD, Article 4 (7) of the GDPR.
245
Article 2 (b) of the DPD; Article 4 (2) of the GDPR.
246
Article 2 (e) of the DPD; Article 4 (8) of the GDPR.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 89
4.3.2.4 Fair and lawful processing
Personal data may only be processed 'fairly and lawfully'.
247
Processing personal data is only
considered fair when this is done in a transparent way for the data subject, which means that the
persons concerned must be aware of the processing.
248
The DPD and the GDPR provide limitative
criteria to determine the lawfulness of data processing.
249
Lawful data processing includes, for
instance, processing in accordance with freely given informed consent for specific purposes;
250
processing that is necessary for the performance of a contract to which the data subject is party.
251
Or
processing that is necessary for the purposes of the legitimate interests pursued by the controller or
a third party, except where such interests are overridden by the interests or fundamental rights
and freedoms of data subjects,
252
especially those of minors. Rules for processing special
categories of personal data are even stricter.
253
Personal data may only be 'collected for specified, explicit and legitimate purposes'.
254
This implies that
before processing takes place, the purposes must have been determined, and brought to the
knowledge of data subjects. Any processing beyond the original purposes is illicit. Furthermore,
the data minimisation principle
255
explicates that no more data than necessary for the original
purposes may be processed. Personal data may in principle not be stored longer 'than is necessary
for the purposes for which the personal data are processed'.
256
The GDPR requires that when personal
data are processed using 'new technologies', while there is a 'high risk for the rights and freedoms of
individuals', a so-called 'data protection impact assessment' must be carried out before processing
takes place.
257
Also, when developing new technologies that enable the processing of personal
data, principles of data protection by design and by default must be obeyed.
258
Thus, CAV tracing
technology must be aimed at processing as little personal data as possible and privacy settings
should avoid collection and processing of personal data by default as much as possible.
4.3.2.5 Rights of data subjects
Data controllers must make sure that data subjects are informed of: a) the identity of the controller
(and processors); b) the purposes for which personal data are processed; c) any further information
such as (types of) recipients of personal data; their rights in terms of whether or not they should
provide certain information, and their rights to access and rectify processed data.
259
247
Article 6 (1) (a) of the DPD; Article 5 (1) (a) of the GDPR.
248
Article 5 (1) (a) of the GDPR; See also Article 29 of the Working Party 2014, p. 16.
249
Article 7 of the DPD; Article 6 of the GDPR.
250
Article 7 (a) of the DPD; Article 6 (1) (a) of the GDPR.
251
Article 7 (b) of the DPD; Article 6 (1) (b) of the GDPR.
252
Article 7 (f) of the DPD; Article 6 (1) (f) of the GDPR.
253
Article 8 of the DPD; Article 9 of the GDPR.
254
Article 6 (1) (b) of the DPD; Article 5 (1) (b) of the GDPR.
255
Article 5 (1) (c) of the GDPR. See also Article 29 of the Working Party 2014, p. 16.
256
Article 6 (1) (e) of the DPD; Article 5 (1) (e) of the GDPR.
257
Article 35 of the GDPR.
258
Article 25 of the GDPR.
259
Articles 10 and 11 of the DPD (see sections 2 for the relevant exemptions); Article 12 of the GDPR.

European Added Value Assessment
PE 615.635 90
Data subjects have the right to access the personal data processed that relate to them, in an
intelligible form, also regarding the sources from which data are obtained.
260
Persons whose data
are processed using TT, have the right to access the obtained data, either in raw format,
261
or as
provided in the GDPR, 'in a structured and commonly used machine-readable format' while the data
subject has the right to transmit those data to another controller, which embodies the right to data
portability.
262
Furthermore, data subjects have the right to revoke earlier given consent, and the right
to rectification of wrong data entries.
263
The GDPR introduced the right to be forgotten, which entails
the right to restrict further processing, when for instance the accuracy of data is contested, or
when processing is unlawful.
264
This implicates that individuals whose location data are
processed via TT, may inter alia claim insight in the logged data, may request a usable copy of
these data in order to have these stored and processed elsewhere, and may require that their
personal data are not further processed.
4.3.2.6 Data security
Controllers are responsible for the integrity and the confidentiality of personal data they process.
Therefore, they must take 'appropriate technical and organizational measures to protect personal data
against accidental or unlawful destruction or accidental loss, alteration, unauthorised disclosure or access,
in particular where the processing involves the transmission of data over a network, and against all other
unlawful forms of processing'.
265
The GDPR provides a non-limitative indication of appropriate
protection measures. Pseudonymisation and encryption of data; the ability to ensure the ongoing
confidentiality, integrity, availability and resilience of (electronic) systems and services which are
used for processing; swift possibilities for back-up and restore of access to and availability of
personal data after an incident took place; and an ongoing process for testing, assessing and
evaluation of technical and organisational measures are listed in Article 32 (1) of the GDPR.
Both the DPD (implicitly) and the GDPR (explicitly) leave room for certain forms of non-public
regulation in order to further fill in inter alia which protection measures are appropriate. Article
40 (1) of the GDPR states that the European Data Protection Board (hereinafter referred to as
EDPA) and the European Commission 'shall encourage the drawing up of codes of conduct intended to
contribute to the proper application of this Regulation, taking account of the specific features of the various
data processing sectors […]'. Eventually, the European Commission may decide that a code of
conduct should have general validity within the EU.
266
A similar system is in place for 'the
establishment of data protection certification mechanisms and of data protection seals and marks for the
purpose of demonstrating compliance with this Regulation of processing operations carried out by
controllers and processors'.
267
Currently, several initiatives are taken to prepare codes of conduct for CAV tracing technology
as mentioned above. In Germany for example, the 'Verband der Automobilindustrie' has issued
260
Article 12 of the DPD; Article 15 of the GDPR.
261
See also Article 29 of the Working Party 2014, pp. 19-20.
262
Article 20 of the GDPR.
263
Article 14 of the DPD; Article 16 of the GDPR.
264
Article 17 of the GDPR.
265
Article 17 (1) of the DPD; see also Article 5 (1) (f) and Chapter IV (Article 24ff) on data security in the
GDPR.
266
Article 40 (9) of the GDPR.
267
Article 42 (1) of the GDPR.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 91
'Data Protection Principles for Connected Vehicles'.
268
On a broader level, the 'European
Automobile Manufacturers Association' has drafted their 'ACEA Principles of Data Protection in
Relation to Connected Vehicles and Services'.
269
However, the results of both initiatives so far
merely comprise principles and starting points; eventual codes of conduct that fit the
requirements of the GDPR will have to be more extensive and detailed than the documents that
are available to date.
4.3.2.7 Personal data breaches, liability and fines
Controllers must notify a supervisory authority within 72 hours after they became aware of a
personal data breach, unless it is not likely that this data breach would 'result in a risk to the rights
and freedoms of natural persons'.
270
Processors must inform controllers likewise 'without undue
delay'.
271
A personal data breach likely resulting in 'a high risk to the rights and freedoms of natural
persons' must also be reported to the data subject by the controller.
272
A personal data breach is
defined as 'a breach of security leading to the accidental or unlawful destruction, loss, alteration,
unauthorised disclosure of, or access to, personal data transmitted, stored or otherwise processed'.
273
Data breaches are thus defined rather broadly; they can include, inter alia, the accidental or
deliberate disclosure of the contents of a database in which TT-data are stored located at the
controllers' or a processors' premises. And also when an event data recorder gets hacked into, or
when an individual accidentally discloses his login credentials to the user data he introduced,
this may be included in the scope.
Any person, who suffers damage resulting from an infringement of the GDPR by a controller or
a processor, may claim damages from the respective controller or processor.
274
Liability primarily
rests with the controller to compensate damage caused by an infringement; a processor can only
be held liable for infringements of the GDPR that are specifically directed to processors, or when
they have acted 'outside or contrary to lawful instructions of the controller'.
275
Article 82 (4) of the
GDPR creates a one-stop-shop to request full compensation for persons who suffered damage
resulting from infringements by multiple actors in controller – processor chains, who have a right
of reimbursement vis-à-vis other infringing actors.
276
The GDPR stipulates in Article 83 that supervisory authorities are entitled to impose
administrative fines that are 'effective, proportionate and dissuasive' on controllers or processors
infringing it. In certain circumstances, these fines may add up to 20 million Euro, or, whenever
higher, 4 percent of the total annual worldwide turnover.
268
Verband der Automobilindustrie, 2015.
269
European Automobile Manufacturers Association, 2015.
270
Article 33 (1) of the GDPR.
271
Article 33 (2) of the GDPR.
272
Article 34 (1) of the GDPR.
273
Article 4 (12) of the GDPR.
274
Article 82 (1) of the GDPR.
275
Article 82 (2) of the GDPR.
276
Article 82 (3) of the GDPR.
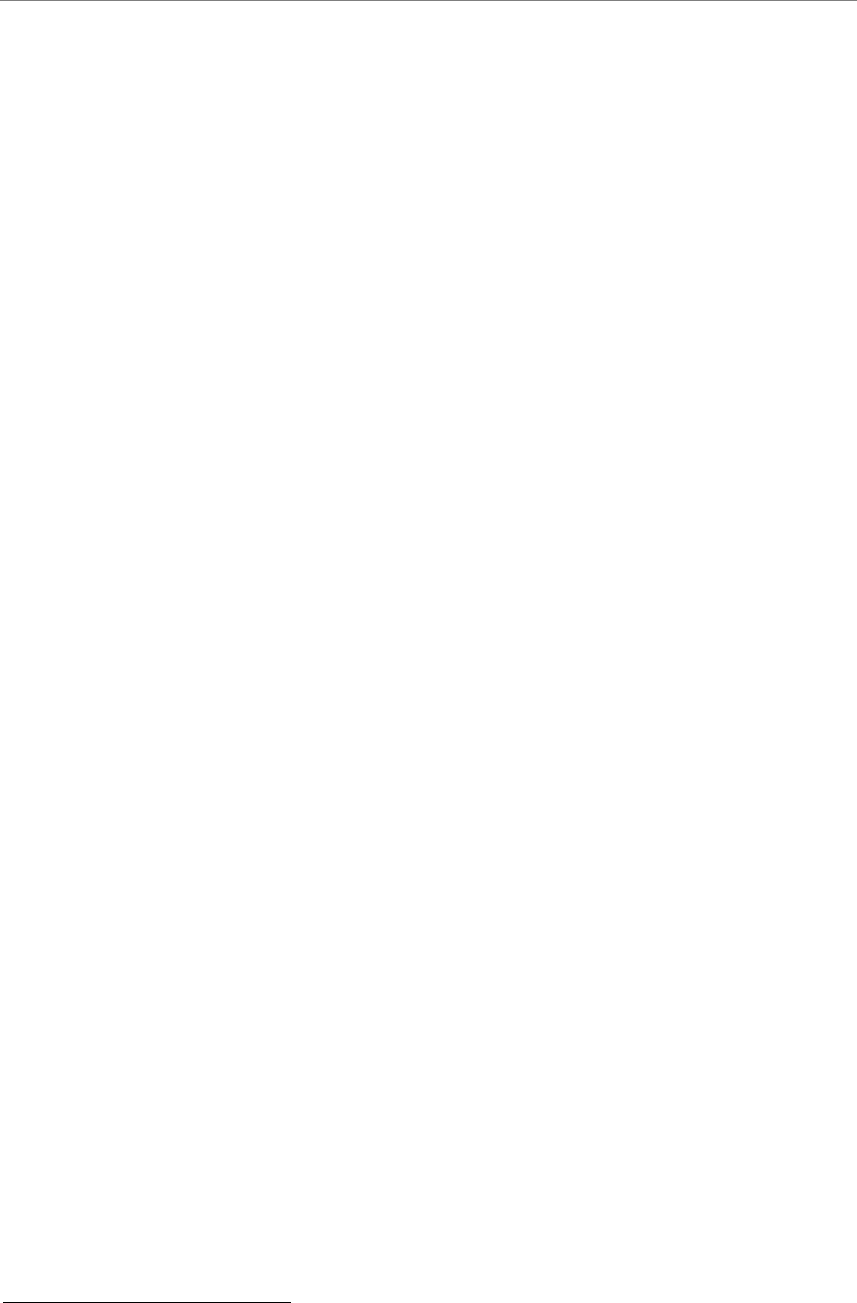
European Added Value Assessment
PE 615.635 92
4.3.2.8 Concluding remarks
Surely TT could, when widely deployed, assist in preventing accidents. When nonetheless
accidents do happen with autonomous vehicles, TT may help assessing how these originated,
who was responsible, and in – at least in some jurisdictions – who could be held liable. However,
the question whether or not CAV TT-data may actually be used as evidence to establish liability,
is not harmonised on the EU level. One trade-off from the deployment of TT is that drivers will
have virtually no other option than to choose CAVs with tracing technology,
277
which probably
comes at the cost of the information privacy of drivers, passengers and other people in the vicinity
of CAVs, since the use of TT will often result in processing personal data. While massive amounts
of personal data can be obtained, stored and otherwise processed in conformity with the rules,
these large data sources will be vulnerable to hacking and other unintended uses in practice,
278
which may have a negative impact on the societal acceptance and the deployment of autonomous
vehicles in society.
279
Rationales behind the current strict and even stricter future harmonised framework on
information privacy include that intercommunal trade is facilitated, while at the same privacy
rights are guaranteed, also when the data of EU citizens are exported to non-EEA countries.
Strongly safeguarded information privacy, as well as transparency regarding the processing of
personal data, favours consumer protection, contributes to consumers' trust, and therefore
societal acceptance of autonomous vehicles.
280
Principles laid down in the GDPR concerning, for
example, privacy-by-design, privacy enhancing technologies and privacy by default, will
challenge producers to develop and incorporate TT that is aimed at protecting the privacy of CAV
operators and bystanders.
4.4 Conclusion
Under the DPD and the new GDPR producers could be liable in their capacity of controllers of
personal data, when they determine the purposes and the means of processing personal data, or
as processors of personal data under the responsibility of a controller. But this will only be the
case if a controller or processor for instance fails to take appropriate technical and organisational
measures to protect the data from being hacked into or infringes other obligations under the DPD
or GDPR. Most types of user introduced data and even location data (if for example as combined
data these can reveal one's identity) will be personal data in sense of the DPD and the GDPR.
Personal data may only be processed 'fairly and lawfully' and be 'collected for specified, explicit and
legitimate purposes', that are brought to the knowledge of the data subjects. CAV tracing
technology must be aimed at processing as little personal data as possible and privacy settings
should avoid collection and processing of personal data by default as much as possible.
Several regulatory challenges regarding the EU privacy framework must be addressed in the light
of emerging CAV tracing technology. First, considering the probable length of CAV data
processing chains and the number of actors involved, all individual controllers and processors
should be stimulated to actively participate in the drafting process codes of conduct and
certification mechanisms that comply with the GDPR. The current data protection principles
endorsed by European automotive producers yet available may provide a good starting point. It
277
See Acharya, 2014, p. 11; also Glancy, 2012 , p. 1172; De Bruin, 2016.
278
See Glancy, 2012, p. 1196-1197.
279
See Glancy, 2012, p. 1225.
280
De Bruin, 2016.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 93
is likely that whenever controllers and processors of personal data are involved throughout the
whole process, they will better adhere to these rules, then when they are left out of the regulatory
loop, which serves privacy protection in general. The European regulator could therefore take on
an active role in the interplay between private actors, national supervisory authorities and the
EDPA, which is nicely facilitated in the (new) GDPR.
Second, since many processors of CAV data will be based in the United States, attention must be
drawn to the export of personal data to the US. The Max Schrems decision has led to the annulment
of the 'safe harbour framework', which was largely used as a basis for the processing of EU
personal data in the US.
281
It is still possible to rightfully exchange personal data with the US,
when for instance standard contractual clauses of the EC are incorporated in agreements with
processors based in non-EEA countries, or in case processing takes place within a multinational
company, binding corporate rules apply ensuring inter alia the lawfulness of the processing
activities.
282
However, a more generic new system which builds upon certain (still valid)
principles of the safe harbour framework, taking due account of the findings of the Court of
Justice of the European Union in the Max Schrems decision, is required to practically and
efficiently facilitate the exchange of CAV data with the US. The Courts' decision was partly based
on the findings that US legislation permits public authorities (such as the National Security
Agency) to have access to (personal) data incorporated in electronic communications on a general
basis, which is contrary to the right to privacy of EU citizens.
283
After the Schrems ruling, the EC
and the US have in close collaboration drafted the text for an 'EU-US Privacy Shield' (hereinafter
referred to as Privacy Shield).
284
According to the Commission, the Privacy Shield inter alia: will
provide stronger obligations on US companies to protect personal data of EU citizens; will enable
stronger monitoring and enforcement of the rules by the US Department of Commerce and
Federal Trade Commission; should no longer enable the generalised access by US public
authorities and provide clear conditions, limitations and oversight for (incidental) access to
personal data; and will install an Ombudsperson for EU citizens to raise enquiries or
complaints.
285
Despite these ambitions, the Electronic Frontier Foundation first observed that the
Privacy Shield still holds openings for generalised access to personal data.
286
Robert Litt, general counsel of the US Office of the Director of National Intelligence,
declared in his letter which is part of the text of the Privacy Shield, that whenever
practicable 'U.S. Signals intelligence activity must always be tailored as feasible […] This
means, among other things, that whenever practicable, signals intelligence collection
activities are conducted in a targeted manner rather than in bulk'.
287
The opinion that this
statement actually still enables mass surveillance is shared by among others the
Electronic Privacy Information Center, who also observe that 'the US must formally
commit to substantial reforms respecting human rights and international law in order to
meet the standards set forth by the CJEU and the Article 29 Working Group', and that the
281
CJEU, Case C-362/14, Schrems.
282
See also European Commission, 2015b.
283
European Commission, 2015b, p. 3; Schrems, paras. 90-94.
284
United States Department of Commerce, 2016; European Commission, 2016; and the Draft Commission
Implementing Decision, 2016.
285
European Commission, 2016, second section ff.
286
O'Brien and Reitman, 2016, p.1.
287
Litt, 2016, p. 3.

European Added Value Assessment
PE 615.635 94
Privacy Shield should include 'provisions to ensure appropriate redress and
transparency' for EU citizens whose data are processed in the US.
288
The Article 29 Working Party in this respect observes that the Privacy Shield indeed
sets a large step forward compared to the Safe Harbour framework by identifying
that 'possible access to data processed under the Privacy Shield for purposes of national
security and law enforcement' is extensively addressed. However, recalling its 'long
standing position that massive and indiscriminate surveillance of individuals can never be
considered as proportional and strictly necessary in a democratic society', the Working
Party takes notice of the aforementioned letter of Robert Litt, which does not exclude
mass surveillance, and states to look forward to 'forthcoming rulings of the CJEU in
cases regarding massive and indiscriminate data collection'.
289
Third, a regulatory answer may be sought to the question whether or not a producer of CAV TT
could be held liable if a data breach occurs due to insufficient security measures taken by him,
while he is not a controller or a processor under the DPD or GDPR, and taking sufficient security
measures by him would thus not be required based on these rules. Neither the GDPR or the DPD,
nor the PLD seems to provide satisfactory outcomes in this respect. The GDPR institutes, from a
consumer protection perspective, a fair system for appointing liability to controllers and
processors who infringe its provisions. For example, the CAV producer who collects and stores
personal data through tracing technology for the improvement of 'his own' CAV driving
technology, and who does not obey the GDPR, will be liable for compensating damage resulting
from a data breach. The same producer however, cannot be held liable when he has provided just
the same – unsafe – tracing technology, where he does not determine the means and purposes for
data processing nor processes under the responsibility of a controller. When for example the
consumer himself decides to share certain personal data with others using tracing technology,
the producer of the technology cannot be held liable under the GDPR, as long as he is not an actor
in the data processing chain.
The PLD provides that a producer can be held liable when a defective product he has put into
circulation causes damage to persons or goods. It may thus be that the CAV producer, who
marketed tracing technology that lacks the level of information safety the public may reasonably
expect, could be liable for the resulting damage. But damage resulting from unsafe tracing
technology does not consist of personal injury or death or damage 'intended and/or used for
private consumption'
290
by the injured person, will not have to be compensated by the producer.
Thus, a significant portion of potential damage resulting from the abuse of vulnerabilities in CAV
tracing technology is not covered within the EU regulatory framework on liability and data
protection to date.
288
EPIC, 2016.
289
Article 29 of the Working Party 2016, p. 4.
290
As stipulated by the PLD, see supra, section 2.3.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 95
5. Conclusions of part 1
In this chapter the conclusions of the previous chapters will be presented and brought together
so as to reflect on the current legal framework as a whole.
5.1 Product liability presents serious points of concern
As for the PLD, the conclusion is that, generally and in its current form, its practical relevance
may in fact be more limited than is often heard. It is rather demanding for consumers in cases
that involve high-tech products such as autonomous vehicles. Defectiveness is determined on the
basis of what the user group may 'reasonably' expect and this is assessed by the standards at the
time of production. Dependent on the legal interpretation of 'reasonableness', this will limit the
scope of the PLD. This calls for calculable legal standards: 'In how far can users expect their
autonomous vehicles to be free from shortcomings or imperfections?' In the absence of such
standards, that alone, may take years or decades of legal uncertainty, and costly proceedings
through which the law will be shaped, case-by-case.
Also, a number of risks are excluded from the PLD. It does not extend to 'new' risks that at the
time of production were not yet foreseen by the legislator and could not be detected by the
producer. Nor does it cover defects that only came to existence after it was launched on the
market or that were not yet captured by safety regulations that the producer has complied to.
Most defects causing casualties will therefore, in our estimation, not be included.
5.2 Alternative route: traffic liability. Concern: not harmonised
It follows, that the current framework for defective products liability presents, if applied to
damage caused by autonomous vehicles, important gaps and limitations. In certain EU member
states, these may be 'circumvented' rather easily by consumers who choose to direct their claim
for damages against the liability motor insurance and base it on traffic liability. Liability insurance
for motor vehicles is mandatory EU (and EEA)-wide and victims enjoy an 'action directe' and other
forms of protection, which may give them a good incentive to turn to the liability motor
insurance. Whether they will in fact do so, will depend on the substantive law (traffic liability
legislation).
Traffic victims under Swedish, French and Belgian law,
291
and those covered by the UK's
legislative proposal for the 'Vehicle Technology and Aviation Bill', are most likely to follow the
route of traffic liability. Product liability claims will, in these countries, remain relevant for the
eventual financial arrangement: recourse (repayment) claims by liability motor insurers vis-à-vis
the producer of the autonomous vehicle involved. Risk-based liability for autonomous motor
vehicles may prove to be an easier route to obtain compensation than the PLD currently provides
for. Under Belgian, French and Swedish law (as well as in the aforementioned bill, proposed in
the UK), the liability motor insurer will de facto, in its relation towards the victim, take over many
technical risks that are excluded from the PLD.
At the same time, the preceding chapters reveal a highly fragmented outcome, which could be
detrimental to the internal market for autonomous vehicles. Here lies an interest for the EU to
regulate traffic liability at least for the extra restraints in the insurance modelled systems (France,
Belgian, Sweden): producers' risks will - at least prima facie – easily be borne by the liability motor
insurers. The exact route chosen (will the injured party's claim be directed against the industry or
291
For Belgium an exception must be made for the driver-victim.

European Added Value Assessment
PE 615.635 96
will it be directed against the liability motor insurer?) ultimately determines who bears the financial
risk. If risk-based liability for motor vehicles is an easier route to compensation than the product
liability-track, then this could – inter alia – impact liability motor insurance premiums in the
particular countries. If the paying motor insurer does not pursue its recourse claim, the producer's
risk of liability will be smaller than in countries that have less 'victim-friendly' traffic liability laws.
Liability motor insurers may well refrain from civil actions because of the constraints of the PLD,
next to private international law issues (foreign court, enforcement mechanisms).
Summarising the above, there may be good arguments for harmonising a basic level of risk
allocation. These arguments also oppose to regulatory interventions that focus solely on the
product liability, overlooking the impact of the risks introduced by autonomous vehicles on
liability motor insurance. The consumer may then, in some countries, in fact be paying twice, if
one-and-the same risk is calculated in the price of autonomous vehicles and in their
motor insurance premium. Ultimately, this could have implications for the roll-out of autonomous
vehicles and might then create locational disadvantages for new developers of their technology.
5.3 Fault liability rules: limited role for damage caused by CAVs
Local differences regarding (general)
292
rules on non-contractual and contractual fault liability
must not be underestimated. Aside from the fact that conventional vehicles may stay on the roads
for years to go, even with fully autonomous vehicles there will always be some human behaviour.
Also others may incur fault or strict liability, such as telecom providers, public authorities and
transport companies.
293
If the software in the vehicle is hacked, these cases too are governed by
different rules and will be treated differently across the internal market.
292
I.e. fault liability rules that are not specifically designed for particular damage causing activities or objects
such as products, traffic and alike.
293
Cf. for the latter, next to the national liability rules, the Convention on the contract for the international
carriage of goods by road (CMR).

Scheme of the basic findings in Part 1
BOX I. PRODUCT LIABILITY DIRECTIVE (PLD)
• Imposes liability on: a) automotive manufacturer,
b) developer/tester whose brand is on the vehicle,
c) importer, d) supplier (if producer is unidentified)
and e) component producer (for manufacturing
defects only), including the software producer.
• Autonomous vehicle or component part has
manufacturing defect, design defect or information
defect. Although PLD-liability is risk-based, the idea
seems to be that the risk presented by the defect was
or should have been avoidable by these parties.
• The PLD only protects damage consequential to
personal injuries, death and property > 500 €.
BOX II. CASES NOT (OR PARTIALLY) PROTECTED BY THE PLD
The PLD does not offer protection in 7 cases and only limited in case 8:
1. The claim is directed against a party who is not liable under the PLD
(e.g. software programmers 'behind the scenes', rental companies, etc.).
2. The defectiveness cannot be proven.
3. It is 'probable' that the autonomous vehicle or its technology became
'defective' after being on the market.
4. The defect concerns scientifically unknown and unforeseen risks at
the time of production or was due to mandatory regulations.
5. The case is for property damage ≤ 500 € or purely financial harm.
6. The case is for damage to the vehicle itself or professional property.
7. The producer lacks financial resources and the vehicle has a design
or information defect (component makers are not liable). Or:
8. the victim was contributory negligent (partially loses protection).
BOX III. NATIONAL TRAFFIC LIABILITY RULES
BOX IV. NOT PROTECTED BY SPECIAL TRAFFIC LIABILITY RULES
BOX V. CASES/CIRCUMSTANCES IN BOX IV (AND BOX II, IF NOT COVERED BY BOX III): RELY ON GENERAL (FAULT) LIABILITY
BOX VI. NO SOLUTIONS FOUND
A. CLAIM AGAINST THE PRODUCER
The producer may, inter alia, incur
fault liability, if he:
- knew or ought to have known
of serious risks to body/health; or
- did not provide information, or
- did not properly update/protect
the software.
B. CLAIM AGAINST THE
DEVELOPER OR TESTER
The developer or tester
may, inter alia, incur
fault liability, if he:
- acted as under A, or
- was negligent in the
design/testing.
C. CLAIM AGAINST DRIVER/OPERATOR
The user may, inter alia, incur fault
liability, if he:
- violated instructions/legal duties, or
- took unacceptable risks (vehicle use in
extreme weather, crowded places), or
- for bad maintenance of the vehicle
and/or its technology (ignoring
messages to update software, etc.).
D. PUBLIC AUTHORITY
Public authorities may,
inter alia, incur fault
liability, if they:
- grant permits for
unacceptable risks, or
- do not protect road safety
(e.g. connectivity unstable
or road signs not yet fit).
A. COUNTRIES WITH RISK-BASED TRAFFIC LIABILITY:
- Sweden, the UK's proposed Vehicle Technology
and Aviation Bill, France and Belgium generally
offer protection in the circumstances 1, 2, 3, 4, 7and 8
that are mentioned in Box II above.
- The other strict liability systems may 'cover' the
cases 1, 2, 3, and 7 in Box II. Case 4 in Box II is
covered if the 'external cause' defence cannot be
invoked for any defects of the motor vehicle (as is the
case in several countries). As for case 8 in Box II, in
most rules on risk-based liability for motor vehicles,
the victim partially loses his right to compensation if
the liable party proves contributory negligence.
B. COUNTRIES WITH FAULT-BASED TRAFFIC LIABILITY:
only if driver/user (operator) knew or should have
known about defects or was otherwise to blame (see
Box V.C).
A. COUNTRIES WITH RISK-BASED TRAFFIC LIABILITY:
Except in Sweden and the UK's proposed Vehicle Technology and
Aviation Bill and, more limited, France and Belgium, strict liability for
motor vehicles generally excludes:
- certain 'external cause' situations (e.g. sudden lapse of connectivity),
- damage to driver (French Loi Badinter offers fault presumption),
- property damage more limited, purely financial harm excluded, and
- contributory fault/intent of victim (degree of protection varies).
B. COUNTRIES WITH FAULT-BASED TRAFFIC LIABILITY:
Cases of Box II will not be protected, unless fault of either
operator/driver, the producer or others can be proven (see Box V).
C. SINGLE-VEHICLE ACCIDENTS:
Except in the Swedish insurance and the UK's proposed Vehicle
Technology and Aviation Bill, the national traffic liability laws under
review offer no protection for single-vehicle accidents. For such
accidents, the PLD must be invoked (see Box I).
Except in Sweden and the UK's proposed
Vehicle Technology and Aviation Bill,
single-vehicle accidents are not protected by
any of the systems for traffic liability under
review. This means that in the 8 cases
mentioned in Box II, these accidents are left
uncompensated (or, in case 8 mentioned in
Box II), partly uncompensated).
RISK-BASED TRAFFIC LIABILITY
Some countries excepted,* there is no
protection for cases 5, 6 and 8 in Box II
and excluded are:
1. damage of the driver,
2. an 'Act of God' or 'external cause',
3. contributory negligence.
* In Sweden, the UK's proposed Vehicle
Technology and Aviation Bill, France and
Belgium cases 4 and 8 in Box II are covered.
FAULT-BASED REGIME FOR TRAFFIC LIABILITY
- Entire Box II not protected, unless fault can
be proven (see Box V).
- None of the situations gives rise to
compensation, if the actual, concrete facts of
the individual case at hand remain unclear.

European Added Value Assessment
PE 615.635 98
PART 2
ANALYSIS AND EVALUATION OF NEW WAYS TO
REGULATE CIVIL LIABILITY FOR CAVS
Part 2 of the current report focusses on future law. It seeks to investigate both the added value of
action taken by the EU regulator and different manners in which the right to compensation for
accidents with autonomous vehicles could be regulated most effectively. Different from Part 1,
the following part of this report is thus not concerned with the current positive law rules. Rather,
it asks whether and how new laws could provide solutions for the constraints and gaps that were
found in the analysis of the current laws. This is based on a normative analysis that aims to find
a balance between stimulating (or at least not discouraging) innovation and safeguarding
personal safety, property and privacy.
The set-up of this part is as follows. Chapter 6 will explore the European added value and the
possibilities for regulatory action at EU-level. In Chapter 7, three different solution models will
be investigated with the goal to resolve the main current legal constraints and gaps in the form
of regulatory action at EU level and/or national level respectively. The focus and nature of these
two chapters is therefore different. Chapter 6 seeks to investigate what regulatory role the EU
could play; the analyses are partly of a meta-legal nature (as to the European added value) and
partly legal-technical (as to possible regulatory interventions at EU-level). Chapter 7 presents a
theoretical analysis of three solution models and a normative evaluation of each model's pros and
cons. What follows, lastly, is the over-all conclusion of this report.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 99
6. European added value
6.1 Introduction
This chapter focuses on the question whether and how regulatory intervention at EU-level could
solve the legal gaps and challenges as were discussed in Part 1 of the current report. First, the
European added value and policy reasons for intervention will be explored (section 6.2). Then,
the legal-technical grounds, limits and scope of regulatory intervention by the EU will be treated
(section 6.3), also in light of the principles of subsidiarity and proportionality (section 6.4). Lastly,
the main findings of this chapter will be presented (section 6.5).
6.2 European added value
The feasibility of EU intervention can be translated into the value that would be 'additional to the
value otherwise created by actions of Member States alone', so-called European Added Value.
294
To determine added value is challenging, as the added value of EU regulatory intervention in the
current context can hardly be monetised on a sound basis, given its intangible nature. Below, it
will be expressed and investigated in terms of its attainment to common European objectives.
Further, empirical research could only be conducted after regulatory intervention at EU-level has
been undertaken or initiated. In the absence of any actual initiatives, the European added value
can be fairly assessed on the basis of expectations provided these are supported by the relevant
facts, arguments and assumptions. Some of these are contested or cannot simply be accepted or
extrapolated to the current question as to the added value; this calls for a critical discussion.
For example, it has been suggested that EU regulatory intervention which aims to
relieve consumers of the onus of proof under the PLD would strengthen their legal
position and therefore protect their economic interests under Article 169 of the
Treaty on the Functioning of the EU (hereinafter TFEU).
295
That, by itself, is not
persuasive as there could be other, far more urgent obstacles that withhold
consumers from pursuing a claim for damages under the PLD than those for which
the EU-intervention creates relief.
Determining the (expected) European Added Value is further challenging as it can be approached
from different perspectives. If the political choice was made to exclusively prioritise consumer
protection (and protection of traffic victims), the added value would be assessed by focusing on
the consumers' health and safety. If, on the other hand, priority would be given to the industry
interests concerning the internal market, a level playing field could be seen as imperative for
liable parties such as automotive producers and, ultimately, for the Member States since it helps
to eliminate distortions within the Community.
296
Both arguments were combined, one could say,
to extend the PLD to agricultural products after the Mad cow disease. Consumer protection was
294
See Commission Staff Working Document, SEC (2011) 867 final, p. 2.
295
Article 169(1) of the TFEU reads: 'In order to promote the interests of consumers and to ensure a high level of
consumer protection, the Union shall contribute to protecting the health, safety and economic interests of consumers,
as well as to promoting their right to information, education and to organise themselves in order to safeguard their
interests'.
296
Cf. Commission Staff Working Document, SEC (2011) 867 final, p. 26.

European Added Value Assessment
PE 615.635 100
considered vital to restore consumer confidence in the safety of agricultural products, thereby
protecting the market as well.
297
The more convincing approach, advocated by the EC and to be found in other European Added
Value assessments,
298
is to investigate added value resulting from multiple factors: promoting
legal certainty, the effectiveness of consumer protection and a level playing field. This is
consistent with the fact that the current report aims at balancing the strive for innovation and
respecting the fundamental values of personal safety, property and privacy of traffic victims.
Harmonising (certain aspects of) the current legal framework for compensation, either through
civil liability or through insurance, must:
a. promote legal certainty for developers of (the software for) autonomous vehicles as to
their risk and the cost of civil liability;
b. create a harmonised level of effective consumer protection within the common market
and
c. create a level playing field for the member states,
thus enabling the successful rollout of autonomous vehicles, with all its possible economic
benefits. These three factors will be explained further below.
The first factor concerns legal certainty. From the preceding chapters it follows, that there is
currently uncertainty as to the legal position of automotive and software producers' and of
liability motor insurers, and the related financial risk. Our expectation is that this increases
transaction costs for producers and it is inefficient as to the determination of the price of liability
insurance. Partly, this uncertainty is due to national diversity, for which not one member state in
particular could be held accountable, and which are easily compromised in the political process
of each member state. Regulatory action at EU-level could thus be a necessary means to decrease
the related transaction costs and subsequently add to the EU's goal to be a competitive player on
this market.
Secondly, serious legal gaps and constraints were found that frustrate effective consumer
protection. Given the fact that the PLD is community law, and that it is interpreted by the CJEU
as providing 'total harmonisation',
299
the member states have no discretion to solve these issues.
As to EU-regulatory action to alter national traffic liability laws, the added value lies in the fact
that this concerns a topic of political controversy that is best not made dependant of the legislative
process of each member states as this will result in different laws. The main legal gap found in
chapter 3 is that the victim-driver is currently excluded from the scope of protection of many
national risk-based laws. This legal gap will, if left to the national legislatures, be addressed
differently around the EU. In fact, some member states have already announced that their
national laws will suffice, whereas the UK's proposal for a 'Vehicle Technology and Aviation Bill'
introduces a legal arrangement through insurance (in which the victim-driver is protected). To
the extent that EU regulatory intervention would address these legal gaps or constraints in the
substantive product and traffic laws, this could strengthen victims' rights and, indirectly,
297
Directive 1999/34/EC of the European Parliament and of the Council of 10 May 1999, OJ June 4, 1999, L
141, pp. 20-21 (at Recital 5).
298
Commission Staff Working Document, SEC (2011) 867 final, p. 3.
299
Supra, section 2.2.6.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 101
complement the added value of the ECC-net, which supports consumers in more practical ways
to seek redress from traders in cross-border cases.
300
Thirdly, Chapters 2, 3 and 4 point to great national diversity regarding the risk of liability: in
some Member States automotive and software producers and/or motor insurers can be expected
to run significantly higher risks of civil liability than in others. Given the EU's high ambitions on
technological innovation,
301
this gives strength to the argument to create a level playing field for
producers and thus member states. This, in its turn, could facilitate the distribution of
autonomous vehicles technology throughout the internal market.
302
These three factors do not necessarily call for full harmonisation to the extent that
the actual amounts of compensation would be made similar within the EU. That
would not only be difficult to achieve without harmonisation of social security laws,
private insurance policies, civil procedural law and the litigation costs as well but it
would also not be in line with variable standards of living. Rather, this report would
support the idea of harmonising the allocation of the risks inherent to the technology
used in autonomous vehicles and the legal position of the parties concerned.
Clearly, the decision to create an EU programme to take regulatory action based on the expected
added value is at the discretion of EU institutions and resulting from the underlying political
process.
303
6.3 Legal basis, limits and scope
The options for regulatory action at EU-level also deserve attention from a legal-technical
viewpoint. The institutions of the EU can bring about legislation if it has been granted the
authority to do so. This 'principle of conferral' has been laid down in the Treaty on the European
Union (hereinafter: TEU). It means that 'the Union shall act only within the limits of the competences
conferred upon it by the member states in the Treaties to attain the objectives set out therein. Competences
not conferred upon the Union in the Treaties remain with the member states'.
304
For the drafting as well
as its choice for the policy instrument used to provide legislation, the principles of subsidiarity
and proportionality must be respected (Article 5(1) of the TEU). For the principle of subsidiarity,
in areas which do not fall within its exclusive competence, such as rules or mechanisms for
damage caused by autonomous vehicles, the TEU stipulates that:
'the Union shall act only if and in so far as the objectives of the proposed action cannot be
sufficiently achieved by the member states, either at central level or at regional and local level,
but can rather, by reason of the scale or effects of the proposed action, be better achieved at
Union level' (Article 5(3) of the TEU).
National initiatives to introduce rules on the compensation of damage caused by autonomous
vehicles will show great differences, leading to different legal outcomes. This may disturb the
internal market to the extent that the risks involved with car driving will be allocated differently
300
Commission Staff Working Document, SEC (2011) 867 final, p. 38.
301
See Communication from the Commission Europe 2020, A strategy for smart, sustainable and inclusive
growth, COM (2010) 2020 final.
302
In these words also De Bruin, 2016.
303
Commission Staff Working Document, SEC (2011) 867 final, p. 3.
304
Sections 1 and 2 of Article 5 of the TEU.

European Added Value Assessment
PE 615.635 102
within the EU. Intervention on the supranational level thus seems necessary in order to
harmonise these rules and/or mechanisms, at least to a minimum level of protection.
Under the principle of proportionality, the TEU holds that:
'the content and form of Union action shall not exceed what is necessary to achieve the
objectives of the Treaties' (Article 5(4) of the TEU).
This means that both in respect of substance as well as the chosen instrument EU-intervention
must not go further than necessary to enable harmonisation. The instrument chosen and its
content must leave as much scope for national decision as possible while achieving satisfactorily
the objectives test as set out below.
6.4 Policy instruments, subsidiarity and proportionality
According to Article 289 of the TFEU, legislative acts in the EU-context can take the form of
regulations or directives (or decisions, but these generally concern specific addressees and/or
issues).
305
The merits of these policy instruments must be carefully considered for the topic at
hand, particularly in the light of the aforementioned principles of subsidiarity and
proportionality. Both instruments are different and have different effects. Yet, the chosen
instrument must be proportionate given the size and nature of the identified problem, which
means here: given the national private law differences with regard to the nature, requirements
and scope of monetary compensation for the damage caused by autonomous vehicles.
306
Generally, it can be noted that regulations are directly applicable as part of domestic
law from the moment they gain force and are then binding to citizens in the member
states, without any transposition, whereas directives are only binding on the member
states themselves and impose an obligation on the latter to create a certain result.
Directives are more flexible since the member states have the power to choose how
and in what specific form to transform them into their national laws.
307
This also
means that regulations are typically regarded as more appropriate than directives if
the topic of EU-intervention would demand a high level of precision and uniformity.
Legislative interventions from the EU to harmonise private law rules, aiming at no more than to
wash away some of the national differences, usually take the form of a directive. In fields of
community intervention where a true uniform implementation of the chosen policy is necessary,
such as in the internal market or, for private law, the field of civil procedural law and the field of
private international law, this may also take the form of a regulation. A directive that imposes on
member states the duty to introduce a no-fault insurance to cover the damage caused by
autonomous vehicles, would probably be most fit to achieve the goals as aforementioned (and
not exceed them).
305
See more in depth Eijsbouts c.s., 2012, p. 56ff.
306
http://ec.europa.eu/smart-regulation/guidelines/tool_15_en.htm#sdfootnote120anc
307
Article 288 and 289 of the TFEU; Craig and De Burca, 2011, p. 112, Chalmers, Davies and Monti, 2014, p.
112.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 103
If the purpose is to harmonise – rather than to regulate in detail – the different laws
in respect of a particular topic, such as liability for defective products, choosing the
form of a directive is found to be more appropriate than to opt for the form of a
regulation.
308
In regulations 'every't' must be crossed and every 'i' must be dotted.
309
As for the introduction of a no-fault insurance, member states need room to
determine its technicalities and to incorporate it in their framework of liability
and/or insurance rules.
6.5 Conclusion
The European Added Value of regulatory action at EU-level was assessed through a multi-
factor approach, as advocated by the EC and common practice in other assessment reports.
This approach is consistent with the current report's aim to find the balance between
technological innovation and respecting and protecting safety of traffic victims.
The added value in the current context results from three factors. Firstly, regulatory action
at EU-level seems imperative to promote legal certainty within the Community, which in
its turn could reduce transaction costs related to dealing with different national liability
laws for damage caused with autonomous vehicles. This will support the competitive gains
of the EU in autonomous vehicle technology. Secondly, EU-action is imperative to further
increase the effectiveness of consumer protection, given the serious legal gaps and
challenges that product liability law will prove to have after the roll-out of autonomous
vehicles. As the PLD is community law and entails 'total harmonisation', it cannot be left
to the discretion of the member states to solve these legal issues. Regulatory action to alter
national traffic liability laws and particularly to include the victim-driver in the scope of
protection, cannot be left to the member states as some have yet announced that their
national laws will suffice, whereas the UK is considering a bill that will offer automatic
compensation to the victim-driver. That would mean that the driver's legal position will be
entirely different under some law systems than under others. Related to this is, thirdly, the
added value argument that regulatory action at EU-level is necessary to create a level
playing field for automotive producers and member states to facilitate the distribution of
this means of transport as one of the driving forces of the internal market.
Legislative interventions from the EU in order to harmonise private law rules come in the
shape of directives. In fields of community intervention where a uniform implementation
of the chosen policy is necessary, such as in the internal market or, for private law, the field
of civil procedural law and the field of private international law, this may also take the
form of regulations. The technical form depends on the solution chosen. This will be treated
in the next chapter.
308
Craig and De Burca, 2011, p. 106.
309
Craig and De Burca, 2011, p. 106.

European Added Value Assessment
PE 615.635 104
7. Three legal ‘solution models’
7.1 Introduction
This chapter presents an analysis of possible legal solutions. Three models will be highlighted:
the model that comprises modifications (or revisions) of product liability law, the model that
comprises modifications in traffic liability laws, and the no-fault insurance model. These three
solution models will be explored and evaluated based on their respective pros and cons and
regulatory challenges. Yet another option would be, in theory, to do nothing: to leave the current
legal framework for liability and insurance untouched. But since that would bring us back to the
gaps and constraints as discussed in Part 1, it will not be treated.
The set-up of this chapter is as follows. The three legal solution models will be set out (section
7.2). Each model will be treated: product liability reform (section 7.3), traffic liability reform
(section 7.4) and no-fault insurance (section 7.5).
7.2 Three legal 'solution models' (with combinations and variations)
Solutions for the legal gaps and constraints found in Part 1 of this report can be found in product
liability law, traffic liability law and/or insurance. Each of these three areas may present a variety
of solutions, of which several may also be combined. Calling them legal solution models brings
out that these are three separate directions to find legal-technical solutions, more particularly:
These three models will be treated separately, including the pros and cons and regulatory
challenges. For the evaluation each model will be assessed on the bases of three criteria: legal
certainty, the scope of protection and efficient claim handling as were set out in section 1.2 of the
Introduction.
7.3 Model 1: Product liability reform
7.3.1 Basic model
The first model in which to find solutions consists of modifications of product liability law, to
make it more fit for the coming of connected and autonomous vehicles. In Chapter 2, various
legal aspects were discussed that are in need of clarification or substantive improvement.
310
Several points of uncertainty under the PLD were mentioned above: is software a product, when
310
See supra, sections 2.4 and 2.5.
1. product liability reform, and/or
2. traffic liability reform, and/or
3. no-fault insurance, drafted for autonomous vehicles (or
with a larger scope: for autonomous objects).

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 105
is it defective, to what extent are paying automotive producers entitled to reimbursement vis-à-
vis producers of the software or hardware of the vehicle, etcetera.
As for substantive modifications, our main conclusion was that the current product liability
regime has a rather limited role to play for autonomous vehicles as, generally spoken,
311
it is
limited to defects or risks that already existed prior to production and, more particularly, those
that were scientifically known to or detectable for the producer, while also its scope of protection
is limited (e.g. not all property damage is recoverable, the 500 Euro threshold, and, in some
countries, monetary caps for compensation). The main
312
constraints are the practical burdens
(financial and technical) and normative uncertainty to establish 'defectiveness' and fault to the
extent that some available defences introduce fault elements. Several modifications are thus
necessary, if the current product liability-regime will be destined as the main source of
compensation for damage caused by autonomous vehicles complementing the injured party's
entitlement to social benefits and (in a number of cases) conventional private insurance.
7.3.2 Ways (and degrees in which) to change product liability law
Several modifications must be considered for this purpose. The first would be to submit a
proposal to include software of connected and autonomous vehicles or software as such in the
concept of 'product' under the PLD. This alone would not suffice as it would leave the other gaps
and constraints untouched. It could also be considered to replace the 'reasonable expectations'-
test that constitutes 'defectiveness' by a stricter criterion (or to abandon this test), at least for
design-defects. US experience also shows that 'in most design-defect situations, this determination (of
defectiveness) turned out to be extremely complicated'.
313
The excluded kinds of property damage and
monetary thresholds under the PLD may be reconsidered, to improve its accessibility as a
compensation system for injured parties.
To increase the relevance of product liability, more fundamentally, the question must be
addressed to what extent new technological risks can be attributed to the industry. The PLD
relieves producers from liability for risks that were objectively unknown or that were
scientifically not detected at the time of production, for compliance to existing rules and every-
day's-risks (of 'wear and tear', vandalism, bad repair, etc.). The latter category of risks is rather
obvious, as these risks are not industrial. But the former two categories, unknown and
undetectable risks, consist of professional business risks and producers may in fact already treat
them as such, albeit not in the context of their liability. It sees to technological vulnerabilities,
software bugs, design risks, and alike, that were not yet known or detectable at the time of
production. To include these in the PLD implicates changing its concept of defectiveness and
abandoning the development risks defence (Article 7, sub e of the PLD).
These are not mere technical but in fact fundamental adjustments. Embedding risks scientifically
unknown or identifiable means: to let go of a fault element in the PLD, that expects no more of
the producer than to comply with the state-of-the-art. If producers will no longer avoid liability
by conforming to the state-of-the-art, that may encourage their research and development (which,
ultimately, will be calculated in the price of the product).
311
The focus will be on the law as it is in almost all member states. Exceptions are those member states that
have abandoned the development risks-defence.
312
Various constraints for the claimant could be mentioned here, such as the relatively short prescription
period, but we have focused on the constraints typically relevant for the specific case of autonomous
vehicles.
313
Rapaczynski, 2016, p. 19.
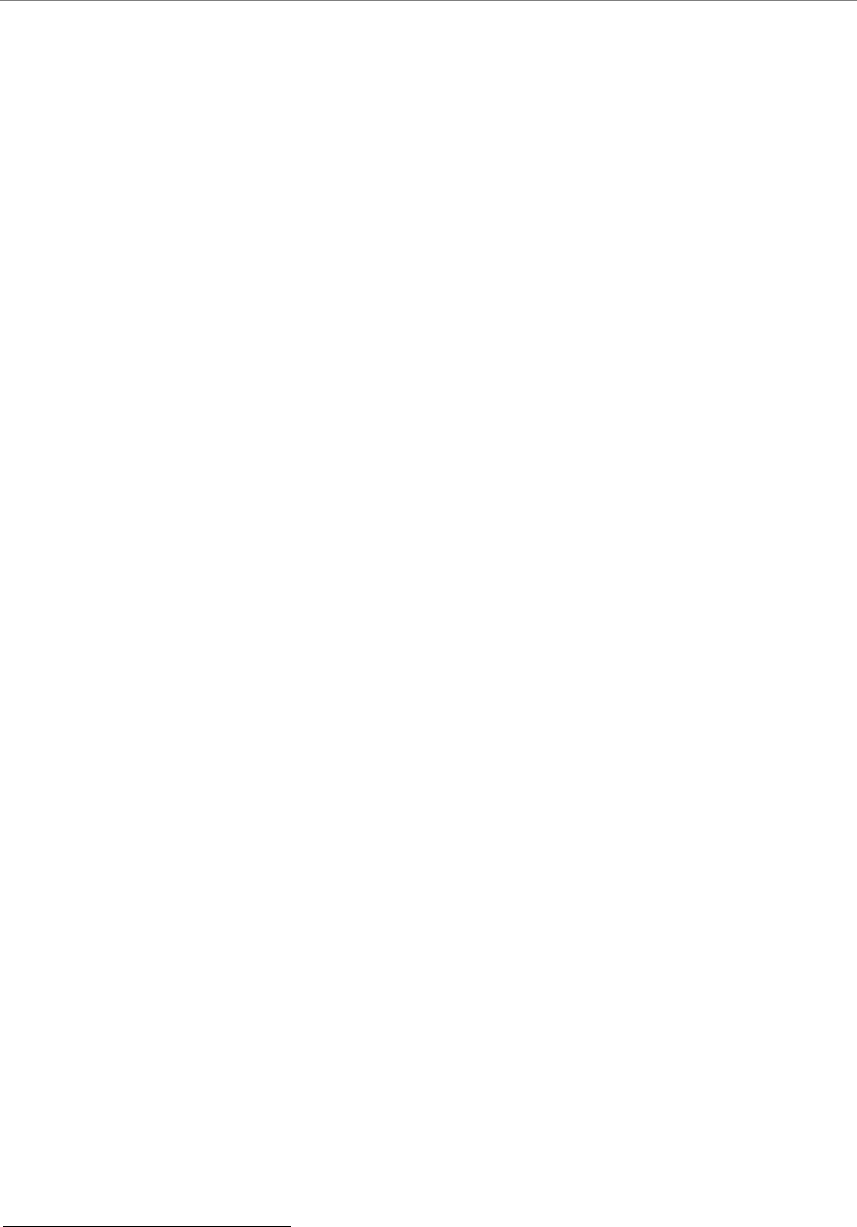
European Added Value Assessment
PE 615.635 106
Opposite that, it would seem difficult to justify making fundamental changes exclusively for
autonomous vehicles and not for the other products covered by the PLD (including conventional
motor vehicles). More importantly, even if the risks as aforementioned would be brought under
the producer's liability, the practical relevance of the PLD will be limited: it will always, to some
degree 'compete' with the applicable national liability rules for motor vehicles, if these are risk-
based. In some countries, the latter rules are much more advantageous to traffic victims than
product liability. This is partly so, because some national systems of risk-based liability for motor
vehicles are close to a 'guarantee' to traffic victims that they are entitled to compensation (as for
instance in Swedish, French, Belgian and partially Dutch traffic liability). For the other part, it is
a procedural matter: in the context of traffic liability, the liable party (liability motor insurer) is
bound to make the victim a compensation offer (or a provisional offer), within certain time
periods and sanctioned by the law.
314
Indirectly, this may frustrate the 'level playing field' of
producers in the market for autonomous vehicles: in some countries their liability risk is high (viz.
in countries with traffic liability laws that offer a moderate or low level of protection) and in other
countries producers may hardly face claims due to the strict liability for motor vehicles imposed
on the owner or keeper of the vehicle (viz. in countries with a high level of protection through
traffic liability, such as France, Belgium and Sweden).
It follows, that if the regulator wishes to canalise liability to the industry (the producer), he must
consider substantive and procedural improvements within the regulatory framework of the PLD,
that weigh up against the benefits of the strict liability rules for motor vehicles (and liability motor
insurance directives). For example, by eliminating or modifying the requirement of defectiveness
and/or by eliminating certain defences of the PLD, particularly its development risks defence. By
strengthening the claimant's procedural position, for instance through the imposition of time-
limits for claim-handling on producers and sanctioned by an obligation to pay statutory interest.
7.3.3 Pros and cons of allocating the damage to 'the' producer
The question will be whether it is considered feasible to impose liability on the industry for yet
unknown risks related to autonomous vehicles, more than under the current law. First,
arguments in favour of improving (and extending) producer's liability will be discussed, and then
the arguments against it.
One reason to shift the burden of liability onto the producer is that the latter is, according to
proponents, 'the cheapest cost avoider'.
315
Producers are viewed as being in the best position to
provide full information in term of risks warnings and instructions to avoid accidents, to control
the manufacturing process, prevent abnormalities and to establish future design improvements.
Producers 'have by far the best access to information about the safety of their products, the best technical
expertise necessary to assess the areas of possible improvement, and the best ability to devise new
technological solutions to safety problems' and 'access to the capital necessary for the implementation of
all the safety decisions'.
316
Imposing liability on them by abandoning the development risks defence
forces producers to internalise all the costs of product-related accidents. This gives them an
314
See e.g. France (Articles 12ff of the Loi Badinter) and Belgium (Articles 13 and 14 of the Wet betreffende de
verplichte aansprakelijkheidsverzekering inzake motorrijtuigen). The procedure prescribed by EU Directive
2009/103/EC for international traffic claims is also sometimes seen as 'best practice' for purely national
claims, Van Boom, 2011, p. 81.
315
A.o. Rapaczynski, 2016.
316
Rapaczynski, 2016, p. 6.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 107
incentive to assess and properly outweigh the product's costs and its benefits and to take safety
measures to efficiently minimise risks.
317
Secondly, some would argue that it would be more 'fair' or 'just' to canalise liability to the
producer, since he benefits from the market launch and sales of the product.
318
This may be most
convincing with regard to technological risks that could not be detected at the time of production:
that entails a typical 'business' risk. The argument would be that since it is the producer who
develops the autonomous vehicle, he must be the party carrying the costs if it later appears to
have risks.
Thirdly, modifying product liability would mean that the costs will ultimately be borne by the
consumers who benefit from its use. The producer may pass these costs onto the consumer, for
example by raising the initial purchase price.
319
This way, the price of the product reflects its 'true'
social costs, also to the consumer who may have too high expectations of its safety. Related to
this, is the consideration that by including the expected cost of accidents in the price of the
product, strict products liability might affect the demand for autonomous vehicles, which could,
in the long run, (further) reduce the number of casualties with motorised vehicles (less cars, even
if autonomous, means less related incidents concerning motorised traffic).
320
On the other hand, a short-term effect of the latter might also be that any contributions to the
relatively high price of autonomous vehicles, may make consumers more hesitant to replace their
own conventional vehicles by autonomous vehicles (and subsequently would only delay the
safety benefits expected of autonomous vehicles). Actually, even the proponents cast doubt
whether including the expected cost of accidents in the price would actually – substantively –
affect the demand for motor vehicles in the European context. The correlation between price and
demand may be complex already, but the argument is even more complicated by the fact that the
increased safety of autonomous vehicles is expected to bring down the premiums for the liability
motor insurance. For consumers, the costs of their liability motor insurance will then be 'replaced',
one could say, by the increased purchase price, at least if producers pass their cost of risk-based
liability onto the consumer.
321
Furthermore, holding the producer liable does not necessarily incentivise the industry to improve
ethical choices. This refers to choices that are made by software developers and 'installed' in
operating software for driverless vehicles. If producers are driven by the fear or costs of being
held liable, that may encourage them to make safety improvements but it will not necessarily
improve their choice of whether the vehicle should stop for a deer crossing the road. To this
extent, liability will only have a limited role to play; rather it is for public intervention, next to
market mechanisms, to give direction here.
322
As for deterrence, this is best be left to public regulation. An interesting point in this regard,
relates to the current expectation that producers of autonomous vehicles (and perhaps service-
providers) may be able to monitor the vehicle and how it is being used after the sale. Rapaczynski
317
Rapaczynski, 2016, p. 6.
318
Cf. Graham, 2012, p. 1260, who warns that 'responsibility for the harm may be shifted away from the technology
itself and toward the user's decisions vis-à-vis the innovation'.
319
Rapaczynski, 2016, p. 7.
320
Rapaczynski, 2016, p. 26.
321
Ibid. Rapaczynski, 2016, p. 26.
322
Which may not at all be easy, as Bonnefon, Shariff and Rahwan, 2016 illustrate. Their study indicated that
consumers may not buy cars that do not protect them at all costs. This could mean 'regulating for utilitarian
algorithms may paradoxically increase casualties by postponing the adoption of a safer technology'.

European Added Value Assessment
PE 615.635 108
claims that 'the computerization involved is also likely to enable manufacturers to maintain a detailed
driving record of each self-driving automobile, registering (and perhaps storing in a general database) not
just the amount of driving, but also its quality, external conditions, passenger behaviour, and a host of
other potentially relevant factors'.
323
For the current purposes, the question must be to what extent
competing developers and producers will have the proper incentive to react or intervene vis-à-vis
their shared target group of customers. The relevance of the ability of producers to monitor is,
that through public regulation or alike, specific duties to update software, monitor, control,
etcetera could be imposed on them and on mere developers. The possibility to act upon the
aforementioned information in terms of internalising it in the cost of autonomous vehicles
however, would probably be better left to insurers, who do not benefit from any market share in
the sales, but are faced with the cost of accidents and thus have a proper incentive to minimise
that cost.
Aside from the debatable issue of deterrence, there are strong voices, particularly amongst US
academics that propose limitations or forms of immunity for the industry.
324
Fears are 'that the
existing tort law may slow down technological progress and that a reasonable reform is necessary',
325
although US practice differs from the European position. The argument could be upheld that
product liability would have a 'chilling effect', if extended to products that are not defective or to
scientifically unknown risks.
In its basic form the argument holds that autonomous vehicles are socially desirable as they make
the roads safer,
326
and that if the industry contributes to that, it should not be confronted with
more claims than before it introduced these advantages.
7.3.4 Regulatory challenges
Modifications of product liability law to include and improve the protection of traffic victims
against possible risks of autonomous vehicles, would require regulatory intervention of the EU.
What perhaps could be used as a point of departure here, is that every five years the Commission
must present a report to the Council on the application of the PLD and, if necessary, it 'shall submit
appropriate proposals' to the directive. But admittedly, the last report, of 2011, does not demonstrate
the desire to modify the PLD in respect of the development risks defence and a small number of
other critical points that had been noted in a previous report. On the contrary, the conclusion
highlights the importance of having a liability instrument that balances the interest of consumer
protection and the producers' interests and expresses the belief 'that the Directive strikes this balance
by reconciling the said interests'.
327
Moreover, canalisation of liability to producers could have adverse effects. To the extent that the
financial risk of damage related to the testing, deployment and use of autonomous vehicles would
be carried by producers, the costs of production will be affected. That could have 'chilling' effects
on innovation, as aforementioned, in the EU in this field, which could be seen as disadvantageous
to society as a whole. But it may also result in producers offsetting the cost of their risk of liability
through liability insurance or through the price of their vehicles.
328
The latter may have the
323
Rapaczynski, 2016, p. 31.
324
A.o. Colonna, 2012, Duffy and Hopkins, 2013 and Funkhouser, 2013. Further in favour of limitations to
limit producers' liability in Dutch academics Schreuder, 2014.
325
Rapaczynski, 2016, p. 3.
326
Van Wees, 2015, section 3.4.
327
European Commission, 2011, p. 11.
328
Cf. Rapaczynski, 2016, p. 25.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 109
advantage that the price of autonomous vehicles would reflect their actual price (viz. in terms of
the accident risk they still present), yet this may also have negative consequences for the
competitive edge of the EU.
7.3.5 Conclusion
The conclusion is that the PLD has room from improvements, but that other regulatory
instruments must be considered and prioritised to achieve adequate consumer protection against
scientifically unknown risks.
7.4 Model 2: Traffic liability reform
7.4.1 Basic model
The second solution model concerns the harmonisation or unification of national traffic liability
rules, or, ultimately, the imposition of risk-based liability on owners or keepers of autonomous
vehicles for the damage caused by their vehicle, regardless of fault.
7.4.2 Ways to change and harmonise the laws on traffic liability
In theory, this could be achieved in different ways. EU-intervention to move member states in the
direction of a risk-based liability for motor vehicles could be done through regulatory
intervention (hard law, which means binding law, for example in the form of a directive) or more
gradually, by developing common legal ideas (soft law). But given the need for certainty of the
law in this field,
329
the latter option is more theoretical than it is of practical value. A regulatory
intervention could involve exclusively autonomous vehicles by imposing on the member states
the duty to introduce a risk-based liability for these vehicles only, or go as far as to introduce risk-
based liability for all motor vehicles, both conventional and autonomous (and all of the
automation variants in between).
An EU-wide risk-based liability would mean that the damage consequential to accidents with
autonomous vehicles is canalised to the owner or the keeper of the vehicle. If the requirements of
damage and the causal link between the injured party's damage and the motor vehicle (or: its
automation) are left to the member states,
330
this will give rise to serious national differences (e.g.
with the French requirement that the motor vehicle was 'implicated' or involved in some way or
another).
331
To find a middle-way between fault-based and risk-based systems of traffic liability
for motor vehicles, it could be considered to make the available defences optional. This would
create scope for the many national differences that exist throughout the EU: the defence of
external cause is not available in several member states, whereas in others it is. Contributory
negligence and assumption of risk of the injured party are most commonly used as defences. In
light of such defences, recording equipment in the autonomous vehicle might provide electronic
evidence of the accident.
332
329
See supra, section 1.1.
330
As is common, also in the PLD and the Francovich state liability for EU-violations.
331
See supra, section 3.2.
332
Duffy and Hopkins, 2014, p. 122.

European Added Value Assessment
PE 615.635 110
7.4.3 Pros and cons of imposing liability on the owner or operator
Substantively, there are indeed voices that propose to allocate the risk that autonomous vehicles
may introduce to the owner and/or the operator of the vehicle.
333
An argument that has been
used in favour of this solution model is that it confronts the owner and operator with the financial
risk of accidents that will still be present, either in the form of being held personally liable for
damages or through carrying liability insurance. This will help them to 'properly value the expected
cost of accidents', and may even be taken into account in their purchasing decisions.
334
A second argument is that this would offer equal protection to injured parties within the
community. In Chapter 3, it was seen that a number of EU member states have risk-based liability
for motor vehicles whereas other member states currently merely rely on fault-based liability. It
was argued, that the risk-based systems generally give injured parties a much better legal position
to receive compensation in cases involving autonomous vehicles than fault-based systems. By
washing away these national differences through harmonisation or unification, European citizens
would have a (more) similar position in the exercise of their right of free movement.
A third argument to harmonise traffic liability for motor vehicles is that this may 'help protect
innovation and encourage manufacturers to push the adoption of this technology forward'.
335
The idea
behind this is that the differences between the national regimes on traffic liability also have an
effect on the role that is left to play for product liability (and the legal pressure on producers):
injured parties are much more likely to prefer the risk-based liability for motor vehicles over
product liability claims.
336
In the member states that have a fault-based (thus less 'plaintiff
friendly') traffic liability for motor vehicles, injured parties must, on the contrary, resort to
product liability. The argument for harmonisation or unification is that such differences between
national liability rules may hamper the conditions of competition. To the extent that the EU aims
to 'level the playing field' for producers through the harmonisation of national laws, liability for
motor vehicles must also be included in this.
All this is further supported by the presence of liability insurance for motor vehicles; the
owner/keeper already carry conventional liability motor insurance, although it has also been
suggested 'insurance specifically designed for autonomous cars could be created'.
337
The increased
safety that autonomous vehicles are expected to bring, creates an argument to assume that the
cost of liability insurance would be modest.
338
However, there are also strong arguments against the imposition of strict liability on the owners
or keepers of autonomous vehicles. For one, it could be argued that consumer confidence in
autonomous vehicles will be undermined by imposing risk-based liability on consumers, in the
sense that buying these vehicles would make them liable for risks that they cannot control in the
same fashion as they are for conventional motor vehicles. The difference with conventional
vehicles is that the higher the level of autonomy is that autonomous vehicles introduce, the lower
the level of control of the owner and of the user will be. The more technically complicated the
vehicle becomes, the less the owner and the user will be able to take safety measures and to
prevent accidents himself. Also from a deterrence point of view, we could imagine that allocating
333
A.o. Duffy and Hopkins, 2014.
334
Rapaczynski, 2016. A similar point was critically discussed in the previous section.
335
Duffy and Hopkins, 2014, p. 119.
336
Recourse claims by the insurers of injured parties vis-à-vis the producer may also not be effectuated, both
for the fact that the PLD offers limited protection and procedural reasons.
337
Duffy and Hopkins, 2014, p. 121.
338
See Duffy and Hopkins, 2014, p. 118.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 111
the costs to the latter at all times, even in situations where the operator has no or little control,
will not be efficient. On the other hand, the owner and operator have a role to play in terms of
the vehicle's maintenance, performing updates of its software and instructing it to move in certain
places under certain conditions, allowing or enabling others to use it, etcetera. If they know ex ante
that breaching these duties will potentially make him liable, that might give them an (extra)
incentive to conform to these duties. This will depend, inter alia, on the conditions of the insurance
policy (bonus-malus).
7.4.4 Regulatory challenges
But the question, more than anything, is whether harmonising or even unifying the national
regimes on traffic liability within the community is, currently or in the near future, politically
achievable. To date there is a large number of EU regulatory acts in various policy areas related
to motor vehicles. Some of these acts are concerned with matters of civil law, more particularly
with compulsory third-party (liability) insurance. However, there has not yet been a substantive
law on traffic liability at EU-level, although initiatives have been explored and taken in the past.
Taking regulatory action at EU-level to that effect will change the national liability rules for
motorised traffic. As seen in Chapter 3, several EU member states do not (yet) have a risk-based
liability for motor vehicles in their national law system. In some of these countries, the existing
fault-based liability is quite similar to risk-based liability because of the high standard of care
applicable for car drivers, but for SAE-level 5 vehicles
339
personal conduct of the user will be
almost irrelevant. In countries with an exclusively fault-based traffic liability law, such as
currently the UK and Malta, this solution model might thus implicate a serious reform of the law
as it stands. This may not be politically achievable nor may it be considered feasible in these
countries. Introducing one single, EU-wide liability for motor vehicles even seems inconceivable,
given the high level of protection offered to victims of motorised traffic in some countries
(Sweden, France, Belgium, and the Netherlands).
7.4.5 Conclusion
The national regimes of traffic liability are not easily harmonised, particularly in the immediate
future. Traffic victims will continue to have an unequal legal position within the community.
Indirectly, this also frustrates the level playing field for producers of autonomous vehicles: it can
be expected that in member states with a high level of protection of traffic victims through
substantive and procedural law, producers will face less claims than in member states in which
traffic liability is exclusively fault-based.
7.5 Model 3: No-fault insurance
7.5.1 Basic model
In the third solution model, the entitlement to compensation is directly derived from the injured
party's own insurance. Generally,
340
this is different from liability insurance for motor vehicles.
Liability insurance can in principle not be the injured party's own insurance, but stands for an
339
See supra, section 1.3 for an explanation of the SAE-levels.
340
With the exception of the Swedish no-fault model for motor traffic accidents, where a distinction is made
between personal liability of the owner or driver of the motor vehicle and objective, no-fault liability of its
liability insurer.

European Added Value Assessment
PE 615.635 112
insurance taken out by the potential wrongdoer. No-fault insurance could either be taken out by
the owner or operator of the autonomous vehicle or by its producer but it does not rely on any
liability: the risk that persons suffer damage caused by the motor vehicle is directly insured. This
last point may be more theoretical than of practical value, since injured parties within the EU
have a direct action against motor liability insurers (and are also in other ways protected by law
as if it were their own, direct insurance). But the fact that no-fault insurance does not depend on
civil liability lies at the core of the no-fault model and does have meaning: it does not present an
adversarial compensation scheme (as third-party liability insurance does); the mere risk that the
motor vehicle was involved in an accident is the object of insurance. In this respect, it is more
similar to private health insurance; with the difference being that the latter in principle covers the
general risk of medical costs of persons as specified when the insurance was taken out. No-fault
insurance will typically rest on the vehicle and the list of insured persons is not necessarily limited
to concrete individuals known or specified ex ante. The insured risk under health insurance
includes (in principle) all health-related damage regardless of its precise cause, whereas no-fault
insurance may be limited to damage caused by traffic accidents.
7.5.2 Finance, assessment of damage, role left for civil liability
The no-fault model seeks to replace the adversarial model of civil liability law by a system of
direct insurance: the policyholder, appointed by law, takes out an insurance package that covers
the risk of damage of all persons inside the vehicle and possibly of other traffic members. These
are all directly insured, regardless of any civil liability. The policyholder will most likely be the
owner or possessor of the autonomous vehicle or its producer (and/or the producer of its
software). If the producer would take out no-fault insurance for potential victims, then it could
or could not still be for the owner, keeper or user to, separately, take out insurance for other risks
related to the vehicle, for example for the risks of car theft, vandalism, fire, or extreme weather
conditions, etcetera.
There are various degrees in which civil liability could be replaced or complemented by no-fault
insurance and different technical ways in which to do it. It would go beyond the scope of the
research that led to this report to discuss them all, but the main issues will highlighted.
Policyholder and premium payments. The most likely parties to fall under the statutory
obligation to take out the no-fault insurance for autonomous vehicles would be the
owner/operator, the producer (and/or the software producer) or both. As far as the premium
payments are concerned, a variable part of the premiums could be considered, paid by individual
owners/operators, and a fixed part (albeit with risk differentiation) to be paid by the industry.
See below, section 7.5.3.
Mandatory? Different from the United States, in Europe, there are only few and specific forms of
no-fault insurance but these mostly rely on a voluntary basis. For example, the (additional)
insurance coverage that owners of motor vehicles can take out for the financial risk of damage of
drivers or passengers. In the no-fault model for autonomous vehicles, as envisaged in this report,
the motor insurance would be mandatory. Some examples of mandatory no-fault policies exist in
the US;
341
these have been criticised in the past, mainly because they were associated with
341
See Rapaczynski, 2016, nt. 63 who mentions that '[n]o-fault insurance laws are currently in force in twelve
states', referring to http://www.iii.org/issue-update/no-fault-auto-insurance.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 113
increased medical costs.
342
However, that appears to regard specifically the American market for
health services. Further, the no-fault insurance, as envisaged here, would complement the injured
party's entitlement to social security benefits.
Insured risk. No-fault insurance would typically cover both the risk of damage of the persons
inside the motor vehicle, including its operator, and the risk of damage of non-motorised persons
outside the autonomous vehicle. The insured risk could be limited to the specific risks generated
by this new technology. But it could also be as wide as to cover all of the vehicle's software and
hardware and other risks attached to the vehicle, such as non-functioning airbags and alike.
The coverage could further be narrowed down in various other ways. One way would be to
require that the autonomous vehicle or its software was 'defective', but as was argued in section
7.3.2 above, this criterion creates many hurdles for successful claims as it requires significant
expertise. It would appear to be most efficient, if the no-fault insurance would cover all risks
produced by the CAV, including how the vehicle was used. Policy makers could investigate these
(and perhaps other) options in close consultation with experts and representatives of insurers,
the industry, traffic victim/consumer associations and possible other stake holders throughout
the community to explore how workable and feasible these really are.
Role left for liability. Another issue to consider is what role civil liability should and could play
in the no-fault model. One possibility is that all parties that would risk liability but for the
insurance model, still carry that risk to the extent that the damage caused by them exceeds the
maximum insured sum. Another possibility is that the no-fault insurance model leaves civil
liability law untouched. In the latter case, the national differences with regard to traffic (and
product) liability will remain. However, in the Swedish experience most victims will not pursue
a claim for compensation based on civil liability as the no-fault claim requires less of them in
terms of proof, etcetera. The no-fault insurer could be granted the right to seek reimbursement
(repayment) vis-à-vis the liable party for the insurance payments paid to the injured party. To the
extent that the damage is not covered by the no-fault insurance, the injured party could maintain
his right to claim compensation from the liable party.
7.5.3 Pros & Cons of the no-fault insurance model
As was outlined in section, there is currently a legislative proposal pending in the UK to introduce
an insurance model, albeit formally based on objective liability similar to Belgium, but with a
wide no-fault scope of protection. There are several proponents that advocate a true no-fault
compensation scheme, both in the US
343
and in Europe, particularly in the Dutch legal doctrine
and amongst certain Dutch insurers.
344
One main advantage is that, compared to the liability
system, the no-fault model promises to reduce the litigation rate and that payments can be made
quicker than in the adversarial model that liability insurance encompasses.
345
The injured party
will claim payment from his own insurance company. The latter will possibly negotiate any
reimbursement with the faulty party's insurance, but reimbursement claims of insurers typically
do not lead to a lot of litigation.
346
342
Rand report, 2010.
343
Funkhouser, 2013.
344
Association of Insurers, 2015 and Van Wees, 2015.
345
Cf. Albert, 2008, p. 108 (referring to Scandinavian no-fault systems).
346
Albert, 2008, p. 317.

European Added Value Assessment
PE 615.635 114
It must be considered to maintain a co-existing role for liability law, either through the injured
party's free choice to opt for a liability claim instead of claiming payment from the no-fault
insurance or through reimbursement claims from the no-fault insurer vis-à-vis the producer. This
has important advantages. First, it is not yet clear what the near future holds, but different future
scenarios for (connected and) autonomous vehicles are currently thought of.
347
Most of these
scenarios are based on the idea that autonomous vehicles will not, in the near future, be used in
cities or city centres, but rather be used on public highways and alike. Having a dual
compensation system would allow policymakers and insurers to gradually, with time, shift its
internal focus from primarily resting on civil liability insurance (covering fault) to the insurance
that rests on a no-fault basis, in accordance with the increased level of automation. Liability
insurance would initially be the main insurance but with time, as the roads will be filled more
and more with autonomous vehicles, and as their technology will be used all around, it would
make place for no-fault insurance (e.g. for failures of technology), as the main mechanism for
compensation.
But there are also (possible) disadvantages and (potentially) negative consequences. The first to
mention is that if the victim's entitlement to insurance payments merely rests on the CAV's
involvement and not on personal liability, possibly capped by a fixed level of payment and/or
maximum insured sums, it may expose insurers to a potentially high risk of claims, compared to
the cost of claims paid under liability law. The strength of this argument requires further research,
but a few remarks can be made here:
a. The cost of no-fault insurance cannot be based on the current accident rates for conventional
motor vehicles given the fact that a serious reduction of accidents is expected of the use of
autonomous vehicles in the long run.
b. Secondly, the no-fault insurance for the European market would complement the social
security entitlements of the insured victims. This means that it has a secondary role, similar to the
limited role that liability law currently plays for accidents caused by conventional motor vehicles.
c. The supposition that the amount of claims paid under no-fault insurance will be higher than
the amount of claims paid under liability insurance, may be counterbalanced, to some extent, by
reduced legal transaction costs under no-fault insurance.
d. There are ways to narrow down the exact scope of the no-fault insurance.
The second, somewhat related disadvantage of the no-fault model could be that it might attract
'false positives' or even false insurance claims altogether. This argument gains strength from the
idea that insurance claims and their assessment (to examine whether the requirements are met)
will be less regulated, less demanding and less detailed than those for claims under the rules of
civil liability law. At the same time this reveals an advantage of insurance over the legal model,
viz. that it replaces judicial determination by an insurer's investigation of the claim. But so as to
ensure equal treatment of insured parties and possible anomalies that private markets may
induce, a system of public law regulation and control would be in place here. That means that
even though litigation costs will be reduced, the costs of public regulation and enforcement must
not be overlooked in this model.
The third point to consider is the lack of incentives that the insurance model would introduce,
both for the industry and consumers. To date, there is no empirical proof that no-fault insurance
347
See e.g. the English reading report of the KiM, 2015.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 115
reduces the level of care or has negative effects for the behaviour of insured parties.
348
However,
we would imagine that a differentiation of the insurance premiums for consumers could be
possible, based on which premiums would consist of a fixed and a variable part. The fixed part
would then, for example, be borne by the producer whereas the variable part would be borne by
the consumer, inter alia based on the individual's annual mileage, his type of car and its safety
devices and his age.
A fourth point concerns the modest level of compensation. Under no-fault policies, this will
generally be lower than under civil liability law, for example in the sense that non pecuniary
damage is not (or to a smaller extent) covered and that the payments for the monetary damage
(medical costs, income loss, etc.) are modest, compared to the generous level of compensation that
national liability laws tend to offer.
349
The question for policymakers to consider here would be
whether limited standardised insurance awards for relatively many injured parties and fast
payment under no-fault insurance is to be preferred over full compensation in restricted cases
that involve lengthy, costly liability litigation.
7.5.4 Regulatory challenges
Technically there may be various ways and grounds to introduce a no-fault insurance model for
autonomous vehicles (or for all motor vehicles) within the community. But the regulatory
challenge is, aside from the points to consider as were mentioned above, particularly, that this
would force EU member states to impose on their citizens (or on producers) the duty to take out
such insurance. Acceptance by the public at large and/or the industry is imperative. Further, no-
fault insurance is only expected to properly function if the market for this insurance product
would be sufficiently competitive. Whether and how this can be achieved within the community,
may require further, more detailed research as to the technical possibilities and market conditions
as well as a scientific inquiry and analysis as to the feasibility and the demand for such an
insurance.
7.5.5 Conclusion
The new social and technological reality of connected and autonomous vehicles calls for the
development of an EU-wide insurance remedy. Given the rapid developments in the market for
autonomous vehicles, a special no-fault insurance, complementary to the injured party's
entitlement to social security benefits, replacing civil liability claims for damages, may provide
for a flexible and satisfactory solution. Both in terms of legal certainty, its potentially wide scope
of protection and efficient claim handling, it appears to outweigh the adversarial options under
the PLD and the national traffic liability laws. Further investigation would be necessary to
develop the details of a comprehensive insurance in close cooperation with representatives of the
private insurance market and industry. The ultimate choice for solutions must be left to politics.
It involves the choice as to what is socially, economically, politically etcetera the 'right' balance to
be struck between the interests of the parties involved – the industry, potential
victims/consumers, distributors, insurers – and society at large.
348
See the Rand report, 2010, p. and the analysis of Van Dam, 2008, p. 341ff with a similar conclusion on p.
356.
349
Cf. Albert, 2008, p. 108 (referring to Scandinavian no-fault models).

European Added Value Assessment
PE 615.635 116
8. Conclusions
8.1 General remarks
The introduction of autonomous vehicles on the internal market will inevitably give a new
impetus to the policy for the protection of safety of their operators. But with all the advantages
that new technologies of autonomous (and connected) vehicles bring, these can and will also be
responsible for casualties on our roads. Although producers claim that some of the technology is
still in a public beta phase, that itself does not indicate which party legally must bear the damage
that results from such casualties.
8.2 Conclusions regarding the current regulatory framework
Below, our conclusions will be presented in numerical form in respect of the current legal
framework for product liability, traffic liability and a few remaining rules on (and grounds for)
liability.
8.2.1 Legal implications of the current product liability rules
1. The current legal framework for producers' liability has been harmonised at EU-level but this
only concerns cases in which damage was caused by a particular 'defect' in the product. This
means that traffic accidents in which autonomous vehicles are implicated are generally not
covered to the extent that they are caused by the vehicle's wear and tear, bad repair, the way it
was used (in the absence of information defects), the road situation, weather conditions or by
other traffic members, etcetera.
2. Concretely, risk-based liability is imposed on automotive manufacturers and others, such as:
developers that put their name or brand on the vehicle, component makers (producers of sensors,
software, etc.), importers and distributors. They can avoid liability by arguing they have not put
their product into circulation. And component makers, if traceable, will also be excused if they
can argue that the defect in the vehicle concerns its design or the (lack of) information as provided
by its producer. Car-dealers are not liable on this risk-basis if they inform the claimant within
reasonable time of the identity of the producer or the person who supplied them with the vehicle.
3. 'The' industry includes several parties that will not incur this risk-based liability for the
vehicle's defectiveness. These include mainly rental companies and other service providers, pure
developers of the operating technology, testing companies and public bodies that allow and
regulate autonomous vehicles to be on the road. These parties incur fault-based liability (and in
some countries particular other grounds for risk-based liability, such as for dangerous movables
or of motor vehicles).
4. The autonomous vehicle (or its component part) will be defective 'if it does not offer the safety
that a person is reasonably entitled to expect'. This calls for a multifactor test,
350
and is therefore
not easily predicted or applied in concrete cases. Generally, the least of problems can be expected
for manufacturing defects; consumers may not expect the vehicle to be 100 percent free of other
defects. 'Information defects' may also consist of unclear warnings, warnings that give the user
too little time to respond to them, not adequately repeating information, not displaying it on the
dashboard and even credible advertisements that make it appear as if no caution of the user is
needed any longer.
350
See supra, section 2.2.4.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 117
5. The analysis pointed to three factors that make the requirement of a 'defect' challenging or
difficult: this not only requires technological knowledge, but also there is normative (legal)
uncertainty as to what the required safety standard is for the technology, other than that it must
equal 'the perfect driver'. Defect free software is an illusion, but to what extent may users expect
the software to be free of vulnerabilities? Thirdly, without interventions this requirement will be
applied and interpreted differently by national courts and practises throughout the EU.
6. Autonomous vehicles will inevitably introduce new risks: risks unknown at the time of
production. The so-called compliance defence and development risks defences lead to the effect
that risks unforeseen by the legislator and risks that could not be detected by the industry, are
carried by the injured party. That may not be perceived as reasonable, and might negatively
impact consumers' confidence.
7. The PLD does not include compensation for damage to the defective product (the vehicle), nor
for goods intended for professional use or property 'in the public domain' (e.g. lamp posts), nor
for property damage below 500 Euro. The damage related to personal injuries or death may, at
the discretion of the member states, be limited to maximum amounts. Any additional liability
must rest on a fault basis as the PLD involves 'maximum' (total) harmonisation.
8. Procedurally, the PLD does not offer any specifications, which means that private individuals
may await long and costly legal proceedings. The legal procedure may also be burdened by fault-
elements of the PLD, for example if the producer raises a contributory negligence defence (see
infra, at 10).
9. The six scenarios showed highly uncertain outcomes and were illustrative for the limited
practical relevance of the PLD. The sensor missing a lane closure and software malfunctioning
could be seen as defects for which the producer is liable, unless the latter shows that the defect
must have appeared after the vehicle was put in circulation, through normal 'wear and tear' or
other parties' interventions (vandalism, bad repair). It would not be realistic to expect producers
to be able to produce material completely incapable of degradation. Nevertheless, in the latter
cases there is no compensation under the PLD. The same can be said, at least to some extent, for
hacking and network problems: if these were caused by 'bugs', vulnerabilities or other risks that
could not be detected, the PLD offers no remedy. Finally, it will not offer full protection if the
user neglects instructions, unless there was an information defect.
10. Lastly, it was argued that legal uncertainty is a barrier that must be taken seriously as it
increases the legal cost and predictability of (cross-border) claim handling and it may be a barrier
to innovation. Uncertainty can be found with regard to the legal standards to determine
'defectiveness', but also as to the standards of care that apply to users (in terms of a lack of
experience using an autonomous vehicle) and to producers (in terms of the levels of safety and
back-up systems that producers must adhere to in order to avoid liability).
8.2.2 Legal implications of the current traffic liability laws
1. The aforementioned gaps and constraints (supra, in section 8.2.1), will be an argument for a
number of injured parties to primarily direct their claim for damages towards the party who was
involved in the traffic accident, rather than to claim compensation from the manufacturer. It may
come 'naturally' to sue the traffic member who was physically involved and be more practical
too: the motor vehicles based in the EU and EEA are covered by mandatory liability insurance,

European Added Value Assessment
PE 615.635 118
for minimum insurance sums, and the injured party is protected by various 'claimant friendly'
rules.
351
2. Yet, the substantive rules on traffic liability have not been harmonised and vary strongly
between very protective risk-based liability for motor vehicles and fault-based liability. This
means that the insured risk of civil liability will be different around the EU. The claimant's
preference will, ultimately, depend on the member state's rules on traffic liability (and other
sources of compensation, such as voluntary private insurance for the driver and/or passengers).
3. The requirement of personal fault will present more difficulties as vehicles become more
autonomous and connected and the objective possibility that human behaviour contributes to the
accident will generally decrease. Consequently, fault liability of the operator (driver) may play a
much less significant role than fault liability for conventional drivers.
4. Fault liability will mostly remain relevant for autonomous vehicles at SAE-levels 1 to 4.
352
At
levels 5 and 6, there can still be fault liability of the operator of the vehicle, but this will be rather
exceptional.
353
This is not only relevant for true fault-based systems, as currently in the UK and
Malta. In most EU member states, the driver only incurs personal liability on a fault-basis if he
causes damage.
5. Fault liability raises several legal issues and uncertainties. A crucial question is to what extent
operators of autonomous vehicles may rely on their hardware and software technology if national
liability rules are to be applied. And: how strict must the fault requirement be applied to the use
of autonomous vehicles? For example, in many countries case-law expects the driver of a motor
vehicle to be experienced, but this seems out of place if operators, on a large scale, are not familiar
with the new technology and streams of information. The current duties of care will hardly be
relevant; new duties of care must be created by case-law, which means there will be a
considerable period of legal uncertainty, resulting in (extra) transaction costs and a lack of
adequate victim protection.
6. One particular gap must be considered for countries that have a risk-based liability for motor
vehicles. These generally (with the exception of Sweden and the UK's 'Vehicle Technology and
Aviation Bill', currently pending) exclude or limit the recovery of the driver-victim or the owner
of the motor vehicle. Motorised victims are thus less protected than other traffic members, for the
reason that using a motor vehicle creates danger. This reason can no longer be maintained if the
accidents rate is seriously decreased by their vehicle and if the owner and user of autonomous
vehicles are 'risk minimisers'.
7. From the comparative overview, there appears to be another possible challenge for countries
with risk-based motor liability. This relates to the fact that their rules vary greatly as to the
requirements for risk-based liability, the legal defences, the scope of protection, the recoverable
heads of damage, the assessment of damage and the level of compensation. The implications of
this may be visible if the cost of liability is off-set in the price of autonomous vehicles or in other
351
See supra, section 3.1.
352
See supra, section 1.3 for an explanation of the SAE-levels.
353
Supra, section 3.2.1 (with examples).

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 119
ways passed onto the consumer. Currently, legal diversity exists for conventional motor vehicles
and motor insurance, but it has less impact because of the underlying fault-based rules.
8. Different from the principle of personal liability, upheld in other countries within the EU, the
Swedish Traffic Damage Act equally protects motorised and non-motorised victims. Both have a
direct right to compensation against the insurer: the insurer's liability, not the insured's personal
(human) liability is the basis of the claim for compensation. This is based on the social believe
that the parties involved are not each other's adversary and that the driver is as much in need of
insurance protection as anyone else injured by motor traffic. The latter is shared by the UK's
proposed Vehicle Technology and Aviation Bill. Both in Sweden and in this proposed bill (but
different from other, liability-based systems in the rest of the EU), drivers are even entitled to
compensation if theirs was the only motor vehicle involved in the accident.
9. The six scenarios illustrate the significant differences that exist between the national regimes
of traffic liability in the EU. It appeared that the fault-based systems would not offer
compensation in half of these hypotheticals, possible exceptions were scenario 4, as it concerns
the user's fault and scenarios 3 and 5, involving a network interruption (then the claim is directed
against the telecom provider) and hacking (claim against the hacker). The current rules on risk-
based liability that exist in a number of member states, protect non-motorised victims and
passengers.
354
The owner, possessor or keeper is generally liable for any technical defects of the
vehicle or errors of the person using it. But in most of these systems (with the exception of
Sweden, France and Belgium) he may raise the defence of external cause in scenarios 3 and 5 (and
avoid liability). The driver/operator who sustains personal injuries or property damage may
carry voluntary insurance, but is generally (except in Sweden and, more limited, in France) not
protected. Property damage is in most national regimes of strict liability for motor vehicles
excluded or treated less favourable than personal injuries.
10. Lastly, central in the national systems of traffic liability are the concepts of 'driver' and, at least
in some systems, 'owner' (or 'possessor' or 'keeper'). Both of these concepts call for close
reconsideration once autonomous vehicles will be launched or more integrated in society,
dependent on how these vehicles will be owned and shared and which parties are in control of
and benefiting from these vehicles.
8.2.3 Legal implications of the current fault liability rules; hacking and
privacy issues
Fault liability will remain necessary with the coming of autonomous vehicles; this can easily be
underrated. In (at least) five ways fault liability will remain highly relevant.
1. Firstly, to give legal meaning to the operator's ('driver's') availability, monitoring and alertness
to signals that he should regain control over his vehicle if needed and not use devices that could
be hacked or could disturb the vehicle's connectivity. Further, fault liability could protect
354
In the Netherlands injured passengers are, strictly spoken, excluded from risk-based liability that is
imposed on the ower/keeper of a motor vehicle. But per 1 January 2017 the Association of Insurers has
declared that liability motor insurers shall compensate injured passengers of the insured motor vehicle on a
no-fault basis.

European Added Value Assessment
PE 615.635 120
potential victims if the operator uses the vehicle in circumstances in which one could foresee that
it might cause damage, such as extreme weather conditions or driving in crowded places.
2. Secondly, this can also be said for the owner's responsibility (if there will be) to update the
vehicle's control system and to take care of the maintenance of the vehicle, to prevent its use
under the special circumstances as aforementioned, or to prevent that the vehicle becomes more
vulnerable to hacking.
3. Thirdly, fault liability may be used to claim damages from local authorities or other
policymakers and/or supervisory bodies, for example for the damage that is caused while
autonomous vehicles are tested on public roads or operated by a control room. Or for traffic
signals that are ill-fitted for connected vehicles.
4. Fourthly, it can be used against producers (e.g. for property damage below the threshold of 500
Euro) and not-producers outside the scope of the PLD (e.g. testers and mere developers).
5. Five, fault liability will be used for other parties that may be more remotely involved, such as
telecom network providers, but also hackers, and this is not harmonised in the EU. Under the
national liability rules in all of the member states, a hacker may be held liable for the damage
caused after hacking into autonomous vehicles. But hackers may be difficult to identify and
locate. Liability may also befall 'peripheral' parties, such as the producer (for autonomous
vehicles' software that is defective because it contains bugs that could have been avoided, and
which enabled the hacking thereof) and the owner or user of the vehicle.
6. Producers risk liability under the DPD and also the GRDP, that will likely gain force in 2018,
by then replacing the former directive, only if they are 'controllers' or 'processors' of personal
data: in both qualities, producers can be held liable for material and immaterial damage resulting
from their infringement. Illustrative are cases in which a controller or processor fails to take
appropriate technical and organisational measures to protect the data from being hacked into; or
fails to notify the supervisory authority and/or people whose data have been revealed by a hack.
7. The question whether or not drivers/operators (users) of autonomous vehicles have the obligation
to install software (security) updates, and whether they can be held liable for the damage caused
by a hack when they did not comply with this obligation, is governed by national law. It was
argued that hacking is likely to be covered by risk-based liability for motor vehicle, but that fault-
based liability demands that the operator has personally breached his duty of care by not taking
measures to prevent hacking.
8. Autonomous vehicles equipped with event data recorders, and/or communicating through
tracing technology may relieve the parties involved in the liability process. Logged vehicle and
driving behaviour data could be used to determine the exact cause of accidents, who was at fault,
and who may be held responsible. Moreover, V2X communication could even prevent accidents
from happening by sharing real-time information on the whereabouts of other autonomous
vehicles on the roads. When TT-data are personal data in the sense of European regulatory
framework on data protection, these must be stored and processed in conformity with current
(strict) rules from inter alia the DPD. Even stricter rules will be applicable in the EU after the GDPR
has come into force. Most technical data (such as motor behaviour, fuel use- and actuator data)
fall outside the scope of the privacy rules, while other forms qualify as personal data (describing
the behaviour of the driver). Most types of user introduced data will be personal data in the sense
of the DPD and GDPR. Location data, indicating whereabouts of the vehicle and its passengers,

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 121
can be personal data. These do not directly represent a natural person. However, it can be
construed that when data from different sources are combined, these can identify the owner of a
vehicle and where he lives and works, which are personal data. The same applies to location data
of a rental, which reveal the identity of the renter if combined with the rental company's customer
administration.
9. The DPD and the GDPR provide a non-limitative indication of appropriate protection
measures that controllers must take, but they also leave room for self-regulation in order to
further fill in inter alia which protection measures are appropriate. Considering the probable
length of CAV data processing chains and the number of actors involved, all individual
controllers and processors should be stimulated to actively participate in the drafting process
codes of conduct and certification mechanisms that comply with the GDPR. The current data
protection principles endorsed by European car producers yet available need to be made more
concretely, but may provide a good starting point.
10. If persons who suffer damage from an infringement of the GDPR claim damages, liability rests
primarily with the controller. The processor can only be held liable for infringements that are
specifically directed to processors, or when they have acted 'outside or contrary to lawful
instructions of the controller'. A regulatory answer may be sought to the question whether or not a
producer of CAV TT could be held liable if a data breach occurs due to insufficient security
measures taken by him, while he is not a controller or a processor. The PLD may be invoked, but
its limited scope of protection may not be satisfactory.
8.3 Conclusions regarding European added value
1. The European Added Value of regulatory action at EU-level was assessed through a multi-
factor approach, as advocated by the EC and common practice in other assessment reports. This
approach is consistent with the aim to find the balance between technological innovation and
respecting and protecting safety of traffic victims.
2. The added value in the current context results from three factors. Firstly, regulatory action at
EU-level seems imperative to promote legal certainty within the Community, which in its turn
could reduce transaction costs related to dealing with different national liability laws for damage
caused with autonomous vehicles. This will support the competitive gains of the EU in
autonomous vehicle technology. Secondly, EU-action is imperative to further increase the
effectiveness of consumer protection, given the serious legal gaps and challenges that product
liability law will prove to have after the roll-out of autonomous vehicles. As the PLD is
community law and entails 'total harmonisation', it cannot be left to the discretion of the member
states to solve these legal issues. Regulatory action to alter national traffic liability laws and
particularly to include the victim-driver in the scope of protection, cannot be left to the member
states as some have yet announced that their national laws will suffice, whereas the UK is
considering a bill that will offer automatic compensation to the victim-driver. That would mean
that the driver's legal position will be entirely different under some law systems than under
others. Related to this is, thirdly, the added value argument that regulatory action at EU-level is
necessary to create a level playing field for automotive producers and member states to facilitate
the distribution of this means of transport as one of the driving forces of the internal market.
3. Legislative interventions from the EU in order to harmonise private law rules come in the shape
of directives. In fields of community intervention where a uniform implementation of the chosen

European Added Value Assessment
PE 615.635 122
policy is necessary, regulations are in place. Which instrument to opt for thus depends on the
legal solution chosen.
8.4 Conclusions regarding the legal solution models
8.4.1 Three legal solution models
Three models must be considered in which different solutions can be found: the model that stands
for modifications or revisions in product liability law (product liability reform), the model that
stands for modifications in the national traffic liability laws (traffic liability reform), and the
model that presents insurance solutions (no-fault insurance). These are each obvious directions
in which various solutions can be found, that can also be combined.
8.4.2 Solution model 1: product liability reform
1. The first point here, would be to submit a proposal to include the software used in autonomous
vehicles or better yet, software as such, in the concept of 'product' under the PLD.
2. It can be considered to also replace the 'reasonable expectations'-test that constitutes
'defectiveness' by a stricter criterion (or to abandon this test), at least for design-defects.
3. An improvement from the consumer's perspective would be to include in the protective scope
of the PLD technological vulnerabilities, software bugs, design risks, and alike, not scientifically
known or detectable at the time of production.
4. This would be a drastic change of the concept of defectiveness (indirectly also affecting the
reasonable expectations-test) and implicates abandoning the current development risks defence
(sub e). Embedding risks scientifically unknown or identifiable means to let go of a fault element
in the PLD, that expects no more of producers than to comply with the state-of-the-art.
5. However, even if these excluded risks would be brought under the producer's liability, the
practical relevance of the PLD will be limited. The reason for that is that product liability will
always, to some degree 'compete' with the applicable national liability rules for motor vehicles, if
these are risk-based.
6. This divergence of national laws within the EU may frustrate the 'level playing field' of
producers in the market for autonomous vehicles: in some countries their liability risk will be
high (viz. in countries in which traffic liability for motor vehicles relies solely on fault) and in
other countries producers may hardly face claims due to the strict liability for motor vehicles
imposed on the owner or keeper of the vehicle (viz. in countries with risk-based liability for motor
vehicles that is close to a 'guarantee' to receive compensation, such as France, Belgium and
Sweden).
7. It follows, that if the regulator wishes to canalise liability to the industry (the producer), he
must consider both substantive and procedural improvements within the regulatory framework
for product liability, that make the claimant's legal position closer to the benefits that
conventional traffic victims are given in the aforementioned systems of strict liability for motor
vehicles and liability motor insurance directives.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 123
8. However, in its last evaluation report concerning the PLD, in 2011, the European Commission
did not demonstrate the desire to modify the Directive in respect of the development risks
defence.
9. Moreover, canalisation of liability to producers could have adverse effects, such as 'chilling'
effects on innovation and producers offsetting the cost of their risk of liability through liability
insurance or through the price of their vehicles, with negative consequences for the competitive
edge of the EU.
10. The conclusion must be that the current product liability law has room for improvements, but
from a consumer protection perspective other compensation mechanisms must be considered
and prioritised.
8.4.3 Solution model 2: traffic liability reform
1. The second solution model concerns the harmonisation or unification of national traffic liability
rules, or, ultimately, the imposition of risk-based liability on owners or keepers of autonomous
vehicles for damage caused by their vehicle, regardless of fault.
2. Given the much expressed need for clarity of the law, soft law instruments seem more
theoretically relevant than they are of practical value.
3. Regulatory intervention could involve exclusively autonomous vehicles by imposing on the
member states the duty to introduce a risk-based liability for these vehicles only, or go as far as
to introduce risk-based liability for all motor vehicles, both conventional and autonomous (and
all of the automation variants in between).
4. One might consider an EU wide risk-based liability that would canalise the damage caused by
autonomous vehicles to the owner and keeper of the vehicle. Causation and the available
defences could partly be made optional, to create scope for the many national differences that
currently exist throughout the EU.
5. The creation of an EU risk-based liability for motor vehicles would provide more of a level
playing field for producers, preventing victims in member states with less favourable traffic
liability rules to resort to product liability.
6. However, it could be argued that consumer confidence in autonomous vehicles will be
undermined by imposing risk-based liability on consumers, particularly because, dependent on
the exact level of autonomy, they may be much less in control of the vehicle than they are in
conventional motor vehicles.
7. But the question, more than anything, is whether harmonising or even unifying the national
regimes on traffic liability within the community is, currently or in the near future, politically
achievable.
8. For SAE-level 5 vehicles,
355
personal conduct of the user will be almost irrelevant. In countries
with a fault-based traffic liability law, such as currently in the UK and in Malta, this solution
355
See para. 1.3 for the SAE-levels.

European Added Value Assessment
PE 615.635 124
model might thus implicate a serious reform of the law as it stands. This may not be politically
achievable nor may it be considered feasible in these countries.
9. 'Full-fletched' harmonisation in the sense of introducing one single, EU-wide liability for motor
vehicles in fact seems inconceivable, given the high level of protection offered to victims of
motorised traffic in some countries (Sweden, France, Belgium, and the Netherlands).
10. Our conclusion is that the current national regimes of traffic liability are not likely to be
harmonised, whereas harmonising them would promote an equal legal position of traffic victims
within the community and could provide a level playing field for producers (who, in member
states that impose risk-based liability on car owners, will be faced with less claims than in member
states in which traffic liability is exclusively fault-based).
8.4.4 Solution model 3: no-fault insurance
It was indicated that the most plausible solution would be to introduce no-fault insurance. The
conclusions in that regard were as follows.
1. No-fault insurance could be taken out by the owner or operator of the autonomous vehicle or
by its producer, but it is characterised by the fact that is does not rely on any liability.
2. Its value is not so much that the risk that persons suffer damage caused by the motor vehicle is
directly insured, as it is that it does not present an adversarial compensation scheme (as third-
party liability insurance does).
3. The statutory obligation to take out the no-fault insurance for autonomous vehicles would
befall the owner/operator, the producer (and/or the software producer) or both. As far as the
premium payments are concerned, a variable part of the premiums could be paid by individual
owners/operators, inter alia based on the individual's annual mileage, his type of car and age,
and a fixed part (albeit with risk differentiation) to be paid by the industry.
4. This could take the form of a compulsory private insurance, for the part of the damage that is
not covered by social security, thus complementing the injured party's entitlement to social
security benefits.
5. If the producer would take out no-fault insurance for potential victims, then it might still be for
the owner, keeper or user to, separately, take out insurance for other risks related to the vehicle,
such as car theft, vandalism and fire.
6. Although the insured risk could be limited to the specific risks generated by this new
technology, we would suspect it would be most efficient if the no-fault insurance would cover all
risks produced by the car, including how it was used.
7. Policy makers could investigate how workable and feasible these options are, in close
consultation with experts and representatives of insurers, the industry, consumer associations
and other stake holders throughout the community.
8. A complementing role of liability law could be maintained, either through the injured party's
choice to opt for a liability claim instead of claiming payment from the no-fault insurance and/or

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 125
through reimbursement claims from the no-fault insurer. The argument against a litigation mode
in terms of its extra transaction cost seems limited: injured parties will use direct insurance
instead of pursuing a liability claim; reimbursement claims of their insurers are limited and
settled out-of-court. Keeping a residual role for liability law has the practical advantage that it
would facilitate a more gradual shift from liability claims towards no-fault insurance throughout
time, as the market transforms from conventional and semi-autonomous motor vehicles at
present towards, ultimately, fully autonomous vehicles.
9. No-fault insurance replaces judicial determination by an insurer's investigation of the claim. It
can only function well if the insurance market for this product is sufficiently competitive. To
ensure equal treatment of insured parties and possible anomalies that private markets may
induce, a system of public law regulation and control would be in place here. That also means
that even though litigation costs will be reduced, the costs of public regulation and enforcement
must possibly not be overlooked in this model.
10. It must be concluded that, given the rapid developments in the market for autonomous
vehicles, a special no-fault insurance, complementary to the injured party's entitlement to social
security benefits, may provide for a flexible, satisfactory solution. However, the conditions within
the insurance market and public regulation (as aforementioned) as well as acceptance by the
public at large and/or the industry are imperative and require further investigation.
8.4.5 Over-all conclusions
Over-all, it is highly recommended that the details of a no-fault insurance for autonomous
vehicles are investigated, in close cooperation with representatives of the private insurance
market and industry. This would rest on a statutory obligation and would see to the part of the
damage not covered by the injured party's entitlement to domestic social security benefits. A
directive that imposes on member states the duty to introduce a no-fault insurance to cover the
damage caused by autonomous vehicles would probably be most fit to achieve the goals as
aforementioned (and not exceed them).

European Added Value Assessment
PE 615.635 126
Bibliography
Acharya, A., 2014. Are we ready for Driver-less Vehicles? Security vs. Privacy – A Social Perspective.
Submitted to ArXiv.org, December 2014, last viewed on 5 April 2016, http://arxiv.org/abs/1412.5207.
Albert, J., 2009. Compensation of victims of cross-border road traffic accidents in the EU: comparison of national
practices, analysis of problems and evaluation of options for improving the position of cross-border victims. Part
II. Analysis, Report, European Commission. Demolin, Brulard, Barthelemy,
http://ec.europa.eu/internal_market/insurance/ docs/motor/20090129report_en.pdf.
Alheit, K., 2001. The Applicability of the EU Product Liability Directive to software. Comparative and
International Journal of Southern Africa 188.
Aon Risk Solutions, 2015. Als de auto autonoom wordt. Verkennende analyse van de verzekeringsmarkt en
nieuwe risico's bij zelfrijdende auto's. Whitepaper, supported by automotive segment, insurers and the
Ministry of Infrastructure and the Environment, April 2015.
Atkins Ltd., 2015. Connected & Autonomous Vehicles. Introducing the Future of Mobility. Report by
Bradburn, J., Williams, D., Piechocki,R. and Hermans, K. Available at
http://www.atkinsglobal.com/~/media/Files/A/Atkins-Corporate/uk-and-europe/uk-thought-
leadership/reports/CAV_A4_digital_250915_FINAL.pdf
Article 29 Data Protection Working Party 2007. Opinion 4/2007 on the concept of personal data.
01248/07/EN, WP 136, viewed on 28 March 2016,
http://ec.europa.eu/justice/policies/privacy/docs/wpdocs/2007/wp136_en.pdf.
Article 29 Data Protection Working Party 2014. Opinion 8/2014 on the Recent Developments on the
Internet of Things. 14/EN, WP 223, viewed on 28 March 2016, http://ec.europa.eu/justice/data-
protection/article-29/documentation/opinion-recommendation/files/2014/wp223_en.pdf.
Article 29 Data Protection Working Party 2015. Opinion 01/2015 on Privacy and Data Protection Issues
relating to the Utilisation of Drones. 01673/15/EN, WP 231, viewed on 28 March 2016,
http://ec.europa.eu/justice/data-protection/article-29/documentation/opinion-
recommendation/files/2015/wp231_en.pdf.
Article 29 Data Protection Working Party 2016. Opinion 01/2016 on the EU – U.S. Privacy Shield draft
adequacy decision. Viewed 17 April 2016, http://ec.europa.eu/justice/data-protection/article-
29/documentation/opinionrecommendation/files/2016/wp238_en.pdf.
Beiker, S.A., 2012. Legal Aspects of Autonomous Driving. Santa Clara Law Review, Vol. 52:4, pp. 1145-
1156.
Bonnefon, J.-F., Shariff, A. and Rahwan, I., 2016. The social dilemma of autonomous vehicles. Science
2016, Vol. 352: 6293, pp. 1573-1576.
C-ITS Deployment Platform, 2016. Final Report. January 2016, http://.ec.europa.eu
/transport/themes/its/news/doc/c-its-platform-final-report-january-2016.pdf.
Colonna, K., 2012. Autonomous Cars and Tort Liability. Journal of Law, Technology & the Internet, Volume
4 (1), pp. 81-130.
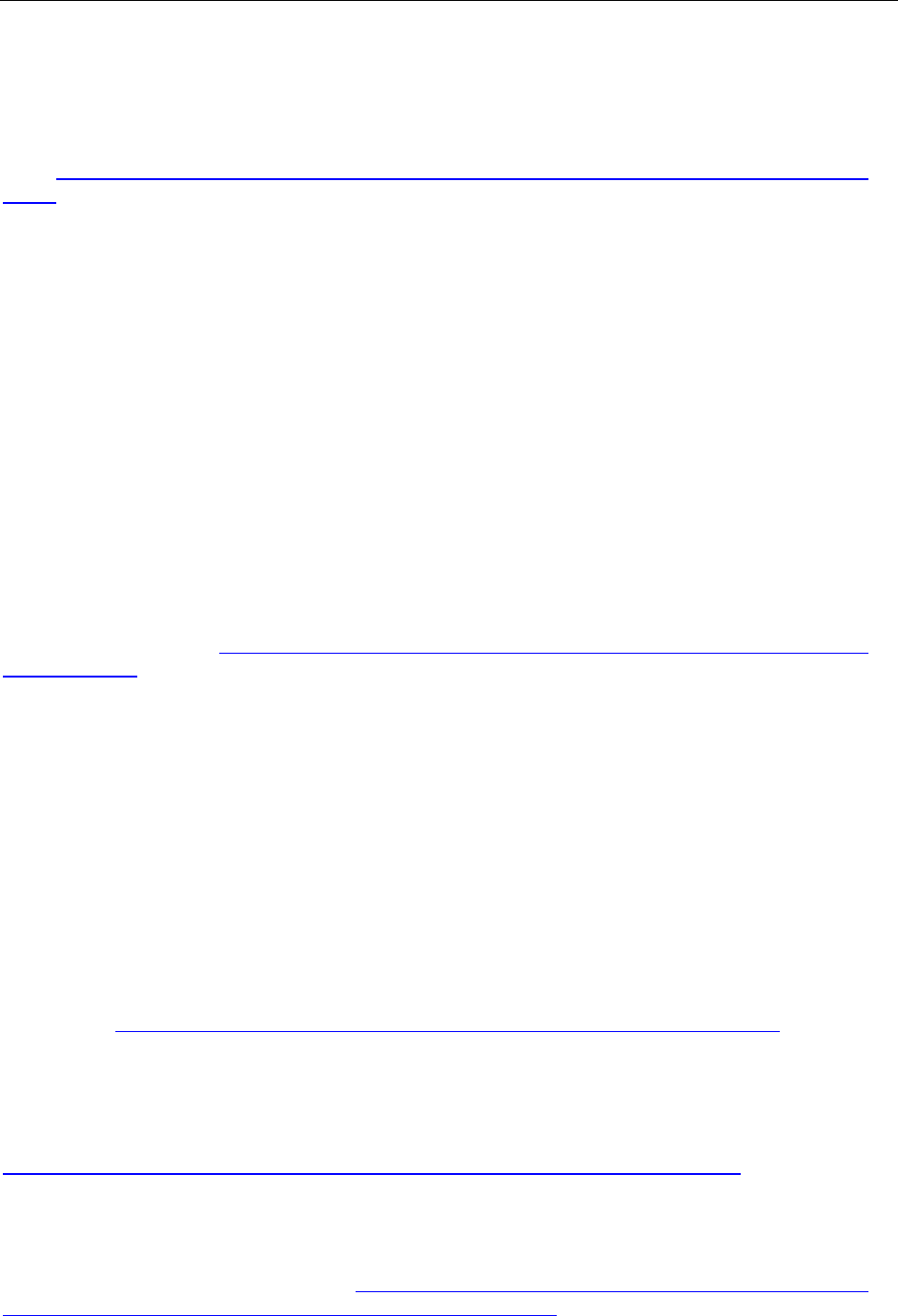
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 127
Commission Staff Working Document, The added value of the EU budget Accompanying the document
Commission Communication A budget for Europe 2020, SEC (2011) 867 final, Brussels 29 June 2011.
Council of the European Union 2015 (15 December), 2012/0011 (COD), 15039/15, viewed on 28 March
2016, http://www.statewatch.org/news/2015/dec/eu-council-dp-reg-draft-final-compromise-15039-
15.pdf.
Craig, P. and De Burca, G., 2011. EU Law, Text, Cases and Materials. Oxford: Oxford University Press.
De Bruin, R.W., 2016. AICs on the European intersection of liability and privacy: regulatory challenges
and the way ahead. European Journal of Risk Regulation.
Chalmers, D., Davies, G. and Monti, G., 2014. European Union Law, Text and Materials. Cambridge:
Cambridge University Press, Third Edition.
De Cock Buning, M., Belder, L. and De Bruin, R., 2014. Mapping the Legal Framework for the
Introduction into Society of Robots as Autonomous Intelligent Systems. In: S. Muller, et al. (Eds.). The
Law of the Future and the Future of Law, Torkel Opsahl Academic EPublishers.
Douma, F. and Palodichuk, S.A., 2012. Criminal Liability Issues Created by Autonomous Vehicles. 52
Santa Clara Law Review, pp. 1157-1169.
Draft Commission Implementing Decision (2016) 'pursuant to Directive 95/46/EC of the European
Parliament and of the Council on the adequacy of the protection provided by the EU', viewed on 17
April 2016, http://ec.europa.eu/justice/data-protection/files/privacy-shield-adequacy-
decision_en.pdf.
Duffy, S.H. and Hopkins, J.P., 2014. Sit, Stay, Drive: The Future of Autonomous Car Liability. SMU
Science & Technology Law Review, Vol. 16, pp. 101-123.
Eijsbouts, W.T., Jans, J.H., Prechal, A. and Senden, L.A.J. (Eds.), 2012. Europees Recht – Algemeen Deel.
4th Edition, Groningen: Europa Law Publishing.
Engelhard, E.F.D., 1998. Aansprakelijkheid voor verkeersongevallen. Nijmegen: Ars Aequi Libri.
Engelhard, E.F.D. and Koudstaal, I., 2014. Directe actie en Gevolg van Erkenningen. In: M.L. Hendrikse,
Ph.H.J.G. van Huizen and J.G.J. Rinkes (Eds.), Verzekeringsrecht. Series Recht en Praktijk, no. VR.2,
Deventer: Wolters Kluwer, pp. 471-498.
EPIC 2016 (16 March), letter to Ms. Falque-Pierrotin, MEP Moraes and Ambassador de Gooijer. Viewed
6 April 2016, https://epic.org/privacy/intl/schrems/Priv-Shield-Coalition-LtrMar2016.pdf.
Ernst, W. (Ed.), 2010. The Development of Traffic Liability. Vol. 5. Cambridge: Cambridge University Press.
European Automobile Manufacturers Association 2015. ACEA Principles of Data Protection in Relation
to Connected Vehicles and Services. Viewed 17 April 2016,
http://www.acea.be/uploads/publications/ACEA_Principles_of_Data_Protection.pdf
European Commission, 2006. Third Report on the application of Council Directive 85/374/EEC of 25 July 1985
on the approximation of laws, regulations and administrative provisions of the Member States concerning liability
for defective products (…), Report to the European Parliament, the Council and the European Economic
and Social Committee. At: https://publications.europa .eu/en/publication-detail/-
/publication/9e838628-6f6e-4351-ac6b-fa1974f6016c/language-en.

European Added Value Assessment
PE 615.635 128
European Commission, 2011. Fourth Report on the application of Council Directive 85/374/EEC of 25 July
1985 on the approximation of laws, regulations and administrative provisions of the Member States concerning
liability for defective products (…), Report to the European Parliament, the Council and the European and
Social Committee. At: http://eur-lex.europa.eu/legal-
content/EN/TXT/?uri=CELEX%3A52011DC0547.
European Commission, 2015a. Black boxes/ in-vehicle data recorders, 19 March. Viewed 28 March 2016,
http://ec.europa.eu/transport/road_safety/specialist/knowledge/esave/esafety_
measures_known_safety_effects/black_boxes_in_vehicle_data_recorders_en.htm#_Journey_
data_recorders.
European Commission, 2015b. Communication to the European Parliament and the Council on the Transfer of
Personal Data from the EU to the United States of America under Directive 95/46/EC following the Judgment by
the Court of Justice in Case C-362/14 (Schrems), 6 November. Viewed 5 April 2016, http://eur-
lex.europa.eu/legal-content/EN/TXT/uri=CELEX%3A52015 DC0566.
European Commission, 2015c. Agreement on Commission's EU data protection reform will boost Digital
Single Market, 15 December. Viewed 28 March 2016, http://europa.eu/rapid/press-release_IP-15-
6321_en.htm.
European Commission, 2016. EU Commission and United States agree on a new framework for transatlantic
data flows: EU-US Privacy Shield, 2 February. Viewed 5 April 2016, http://europa.eu/rapid/press-
release_IP-16-216_en.htm.
Friberg, S. and Dufwa, B.W., 2010. The development of traffic liability in Sweden. In: W. Ernst (Ed.), The
Development of Traffic Liability. Cambridge: Cambridge University Press, pp. 190-227.
Frizell, S., 2014. Meet the Robots Shipping Your Amazon Orders. TIME, available at:
http://time.com/3605924/amazon-robots/.
Funkhouser, K., 2013. Paving the Road Ahead: Autonomous Vehicles, Products Liability, and the Need
for a New Approach. Utah Law Review, No. 1, pp. 437-462.
Gasser, T.M., Arzt, C., Ayoubi, M., a.o., 2013. Legal consequences of an increase in vehicle automation.
Consolidated final report of the project group, BASt-Report F83 (Part 1). Available at:
http://www.bast.de/DE/FB-F/Publikationen/DownloadPublikationen /Downloads/F-
legal%20consequences.pdf?__blob=publicationFile
Glancy, D., 2012. Privacy in autonomous vehicles. 52 Santa Clara Law Review, pp. 1171-1239.
Glielmo, L., 2011. Vehicle-to-Vehicle/Vehicle-to-Infrastructure Control. In: T. Sammad and A.M.
Annaswamy (Eds.), The Impact of Control Technology, IEEECS, available online at
http://ieeecss.org/general/impact-control-technology.
Gogarty, B. and Robinson, I., 2011. Unmanned Vehicles: A (Rebooted) History, Background and Current
State of the Art. Journal of Law, Information and Science, Vol. 21:2, pp. 1-34.
Graham, K., 2012. Of Frightened Horses and Autonomous Vehicles: Tort Law and Its Assimilation of
Innovations. Santa Clara Law Review, Vol. 52: 4, pp. 1241-1270.
Greenberg, A., 2015. Uber hires the hackers who wirelessly hijacked a jeep, viewed March 11 2016, available
at http://www.wired.com/2015/08/uber-hires-hackers-wirelessly-hijacked-jeep/.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 129
Gurney, J.K., 2013. Sue my car not me: products liability and accidents involving autonomous vehicles.
Journal of Law, Technology & Policy, No. 2, pp. 247-277.
Hellner, J., 1988. The Swedish Alternative in an International Perspective. In: C. Oldertz and E. Tidefelt
(Eds.), Compensation for Personal Injury in Sweden and other Countries. Stockholm: Juristförlaget, pp. 17-
39.
Hellner, J., 2001. Compensation for Personal Injuries in Sweden – A Reconsidered View. Scandinavian
Stud. Law, Vol. 41, pp. 249-276.
Hevelke, A. and Nida-Rümelin, 2015. Responsibility for Crashes of Autonomous Vehicles: An Ethical
Analysis. Science and Engineering Ethics, Vol. 21, pp. 619-630.
Jones Day, 2012. Product Law Worldview. Pohl, P.M. a.o. Available at
http://www.jonesday.com/product_law_worldview/ .
KiM-report, 2015. Driver at the wheel? Self-driving vehicles and the traffic and transport system of the future,
Netherlands Institute for Transport Policy Analysis (KiM) of the Dutch Ministry of Infrastructure and
the Environment, The Hague, October 2015 (English translation, available at
http://english.kimnet.nl/publications/ reports/2015/10/14/driver-at-the-wheel).
Köhler, T., 1997. The Nordic Concept of Indemnity to Drivers. NFT 1/1997, pp. 70-72.
KPMG, 2015. Automobile insurance in the era of autonomous vehicles. Survey results, June 2015.
Leenes, R. and Lucivero, F., 2014. Laws on Robots, Laws by Robots, Laws in Robots: Regulating Robot
Behaviour by Design. Law, Innovation and Technology, Vol. 6:2, pp. 193-220.
Lengton, M. et al., 2015. Internet of Things, Connected Cars. Case study 43, European Commission,
February 2015.
Litt, R., 2016. In United States Department of Commerce 2016.
Lovell's report, 2003. Productaansprakelijkheid in de Europese Unie. Een verslag voor de Europese Commissie.
Written by J. Melzer, R. Freeman and S. Thomson. Study on product liability for the European
Commission, February, 2003.
Marchant, G.E. and Lindor, R.A., 2012. The Coming Collision Between Autonomous Vehicles and the
Liability System. Santa Clara Review, Vol. 52, pp. 1321-1340.
Norton Rose Fullbright Whitepaper, Autonomous vehicles. The legal landscape in the US and Germany, July
2016.
O'Brien, D. and Reitman, R., 2016. The Privacy Shield is Riddled with Surveillance Holes. Viewed 5
April 2016, https://www.eff.org/nl/deeplinks/2016/03/privacy-shield-riddled-surveillance-holes.
Palmerini, E., Azzarri, F., Battaglia, F., et al., 2014. D 6.2, Guidelines on Regulating Robotics. 22
September 2014. Available at: www.robolaw.eu/RoboLaw_files/documents /robolaw_d6.2_
guidelinesregulatingrobotics20140922.pdf .
OECD/ITF, 2015. Automated and Autonomous Driving, Regulation and Uncertainty. Available at:
www.internationaltransportforum.org.

European Added Value Assessment
PE 615.635 130
Råman, J., 2006. Regulating Secure Software Development. Analysing the Potential Regulatory Solutions for
The Lack of Security in Sofware. Rovaniemi: University of Lapland Printing Centre.
Rand report, 2009. Liability and Regulation of Autonomous Vehicle Technologies 1. By Kalra, N., Anderson,
J.M. and Wachs, M. California PATH Research Report, UCB-ITS-PRR-2009-28, Berkeley, Calif.:
University of California at Berkeley. Published: Santa Monica, CA: Rand corporation.
Rand report, 2010. The U.S. Experience with No-Fault Automobile Insurance – A Retrospective. By Anderson,
J.M., Heaton, P. and Carroll, S.J. Published: Santa Monica, CA: Rand Corporation.
Rand report, 2014. Autonomous Vehicle Technology. How to Best Realize Its Social Benefits. By Anderson,
J.M. a.o. Published: Santa Monica, CA: Rand corporation.
Rand report, 2016a. Driving to Safety. How Many Miles of Driving Would It Take to Demonstrate Autonomous
Vehicle Reliability? By Kalra, N. and Paddock, S.M. Report no. RR-1478-RC. Published: Santa Monica,
CA: Rand corporation.
Rand report, 2016b. Autonomous Vehicle Technology – A Guide for Policy Makers. Anderson, J.M., Kalra,
N., Stanley, K.D., Sorensen, P., Samaras, C. and Oluwatola, O.A. Published: Santa Monica, CA: Rand
corporation.
Rapaczynski, A., 2016. Driverless Cars and the Much Delayed Tort Law Revolution. Columbia Law and
Economics Working Paper No. 540. Available at: http://ssrn.com/abstract=2764686
Reed, C., 2007. Taking Sides on Technology Neutrality. SCRIPT-ed, Vol. 4:3, pp. 263-284.
Reinmann, M., 2015. Product Liability. In: M. Bussani and M. Sebok (Eds.), Comparative Tort Law,
Research Handbooks in Comparative Law Series, Edward Elgar, pp. 250-278.
Report 'Toekomstvisie Automotive, Onderweg naar morgen', Verbond van Verzekeraars, June 2015.
Available at: www.verzekeraars.nl.
Schaafsma, F., a.o., 2012. Changing insurance company claims handling processes improves some
outcomes for people injured in road traffic crashes. BMC Public Health 2012, 12, pp. 1-9.
Schellekens, M., 2015. Self-driving cars and the chilling effect of liability law. Computer Law & Security
Review, Vol. 31, pp. 506-17.
Schreuder, A.I., 2014. Aansprakelijkheid voor 'zelfdenkende' apparatuur. Aansprakelijkheid Verzekering
& Schade, 20.
SCOR Global P&C, 2013. Motor Third Party Liability: Analysis of Serious Bodily Injury Compensation
from a European Perspective, Paris: SCOR Global. Available at:
https://www.scor.com/PandC_docs/SCORNL_DommagesCorpo_EN_072013b.PDF.
Shears, P., 2007. The EU Product Liability Directive, twenty years on. Journal of Business Law, pp. 884ff.
Stallman, R. On hacking. Viewed 15 April 2016. Available at: https://stallman.org/ articles/on-
hacking.html.
Strömbäck, E., 1988. Insurance in Favour of the Victims of Motor Traffic in Sweden. In: C. Oldertz and
E. Tidefelt (Eds.), Compensation for Personal Injury in Sweden and other Countries, Stockholm: Juristförlaget,
pp. 41-50.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 131
Susskind, R. and Susskind, D., 2015. The Future of the Professions, How Technology Will Transform the Work
of Human Experts. Oxford: Oxford University Press.
Swedish Transport Agency, 2014. Autonomous Driving. Transport Styrelsen, TSG 2014-1316.
Tjong Tjin Tai, E. and Boesten, S., 2016. Aansprakelijkheid, zelfrijdende auto's en andere zelfbesturende
objecten. Nederlands Juristenblad, 495, vol. 10, pp. 656-664.
UK Department for Transport, 2015. The Pathway to Driverless Cars, Summary Report and Action Plan.
United States Department of Commerce, 2016. Letter concerning the EU-US Privacy Shield, 23 February
2016. Viewed on 5 April 2016 at: https://www.commerce.gov/ sites/commerce.gov
/files/media/files/2016/eu_us_privacy_shield_full_text.pdf.pdf.
Van Boom, W.H., 2011. Do insurers have to pay for bad behaviour in settling claims? Journal of European
Tort Law, I, pp. 77-102.
Van Dam, M., 2008. 'Fault en No-Fault'. In: Gedrag en Privaatrecht. W.H. van Boom, I. Giesen and A.
Verheij (Eds.), The Hague: Boom Juridische Uitgevers, pp. 341-366.
Van Dam, C.C., 2013. European Tort Law. Oxford: Oxford University Press.
Van Wees, K.A.P.C., 2015. Aansprakelijkheidsaspecten van (deels) zelfrijdende auto's. Aansprakelijkheid,
Verzekering & Schade, 28, pp. 170-180.
Van Wees, K. A. P. C., Vellinga, N. E., and Vellinga, W. H., 2015. Enkele juridische aspecten van het testen
van autonome of zelfrijdende auto's op de voor het openbaar verkeer openstaande weg: Onderzoek in opdracht van
het Ministerie van Infrastructuur en Milieu. The Hague: Ministry of Infrastructure and the Environment.
Vellinga, N.E., 2014. De civielrechtelijke aansprakelijkheid voor schade veroorzaakt door een autonome
auto. Verkeersrecht, 151.
Vellinga, N.E., Vellinga, W.H. and Van Wees, K.A.P.C., 2016. Testen van autonome of zelfrijdende auto's
op de openbare weg. Verkeersrecht, 64, 6, pp. 218-227.
Verband der Automobilindustrie 2015, 'Data Protection Principles for Autonomous Vehicles', viewed
on 17 April 2016, https://www.vda.de/dam/vda/Medien/EN/Themen/Innovation-und-
Technik/Vernetzung/Datenschutz-Prinzipien /vda-data-protection-principles.pdf.
Vergès, E., 2014. Scientific and Technological Evolution through the Legal Prism. Law, Innovation and
Technology, Vol. 6:1, pp. 74-93.
Vihul, L., 2014. The Liability of Software Manufacturers for Defective Products. CCDCOE The Tallinn
Papers Vol. 1, No. 2, viewed 15 April 2016, https://ccdcoe.org/publications /TP_Vol1No2_Vihul.pdf.
Yeomans, G., 2014. Autonomous Vehicles – handing over control: opportunities and risks for insurance.
Viewed 28 March 2016 at: https://www.lloyds.com/~/media/lloyds/reports/
emerging%20risk%20reports/autonomous%20vehicles%20final.pdf.

ANNEX II
Socio-economic analysis of the EU Common
approach on liability rules and insurance related to
connected and autonomous vehicles
Research paper
by RAND Europe
Abstract
This study provides an evidence-based assessment of the possible added value of
developments of EU rules on liability and insurance related to the testing, deployment and
use of connected and autonomous vehicles in the European Union. The research focuses on
the liability and social and economic impacts of fully autonomous or self-driving vehicles.
It also focuses on the Product Liability Directive. We adopt a mixed method approach for
assessment. First, we undertake qualitative interviews with key stakeholders (including car
manufacturers, insurers, those from connected industries, those who provide services or
supervise compliance, as well as consumer agencies) to explore the appropriateness of the
existing liability regulation as well as amendments to European liability law on the
deployment and take-up of connected and autonomous vehicles. Second, we conduct
quantitative (economic) analysis of the possible added value of these legislative changes on
deployment. We find that while product liability legislation is seen to be of critical
importance for producers in developing and bringing new technologies to market, pre-
emptive legislation of the Product Liability Directive (PLD) to account for connected and
autonomous vehicles is not required at this time.

European Added Value Assessment
PE 615.635 134
AUTHOR
This study has been written by Charlene Rohr and Fay Dunkerley at RAND Europe and by
Professor David Howarth from the University of Cambridge, at the request of the European
Added Value unit of the Directorate for Impact Assessment and European Added Value,
within the Directorate General for Parliamentary Research Services (DG EPRS) of the General
Secretariat of the European Parliament. This report has been peer-reviewed in accordance with
RAND's quality assurance standards.
ADMINISTRATOR RESPONSIBLE
Tatjana Evas, European Added Value Unit.
To contact the Unit, please e-mail EPRS-EuropeanAddedVa[email protected]
LINGUISTIC VERSIONS
Original: EN
DISCLAIMER
This document is prepared for, and addressed to, the Members and staff of the European
Parliament as background material to assist them in their parliamentary work. The content of
the document is the sole responsibility of the author(s) and any opinions expressed herein
should not be taken to represent an official position of the Parliament.
Reproduction and translation for non-commercial purposes are authorised, provided the
source is acknowledged and the publisher is given prior notice and sent a copy.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 135
Contents
Contents ..................................................................................................................................... 135
List of Tables .............................................................................................................................. 137
List of Figures ............................................................................................................................. 137
Abbreviations ............................................................................................................................. 137
Executive summary ................................................................................................................... 138
Acknowledgements ................................................................................................................... 140
Chapter 1 Introduction ............................................................................................................. 141
I - Background .......................................................................................................................... 141
1. Definitions and context ....................................................................................................... 142
2. Key liability and insurance issues ..................................................................................... 143
II - Objectives and scope of this paper .................................................................................. 147
III - Structure of the paper ...................................................................................................... 148
Chapter 2 Stakeholders' views of amendments to the Product Liability Directive ...... 149
I - Proposed legislative policy options .................................................................................. 150
II - Stakeholders' views on the legislative options .............................................................. 152
Chapter 3 Quantifying the socio-economic costs and benefits of the legislative options
157
I - Background .......................................................................................................................... 158
II - Framework for quantifying the socio-economic costs and benefits ........................... 158
1. Cost-benefit methodology .................................................................................................. 158
2. Establishing the baseline and scenarios............................................................................ 159
III - Findings from the cost-benefit analysis ......................................................................... 165
Chapter 4 Assessing the legislative policy options ............................................................. 171
I - Analysis of policy options .................................................................................................. 171
II - Recommendations ............................................................................................................. 174
References ................................................................................................................................... 177
Appendix A: Background information for interview participants .................................. 179
Appendix B: CBA Methodology, data and assumptions for quantitative assessment . 180
List of tables
Table 1: SAE and NHTSA levels of automation ..................................................................... 143
Table 2: Summary of impacts by stakeholder group included in the CBA ........................ 162
Table 3: Proportion of new cars and all cars that are FAVs, by scenario (%) ..................... 166
Table 4: Summary CBA impacts of scenarios for the EU (€bn in 2015 prices) ................... 169
Table 5: Assessment of legislative policy options .................................................................. 173
List of figures
Figure 1: Baseline Market Penetration Rates for FAVS ......................................................... 160
Abbreviations
ACEA European Automobile Manufacturers Association
CBA Cost-benefit analysis
DfT Department for Transport
EC European Commission
EU European Union
FAVs Fully Autonomous Vehicles
GHG Greenhouse gas
MID Motor Insurance Directive
MS Member State(s)
NHTSA US National Highway Traffic Safety Administration
OECD Organisation for Economic Co-operation and Development
PLD Product Liability Directive
SAE Society of Automotive Engineers
VKT Vehicle Kilometres Travelled
VOT Value of Time

European Added Value Assessment
PE 615.635 138
Executive summary
The objective of this research paper is to provide an evidence-based assessment of the possible
added value of development of EU rules on liability and insurance related to the testing,
deployment and use of connected and autonomous vehicles in the European Union.
The research focuses on the liability and social and economic impacts of fully autonomous or self-
driving vehicles (referred to as FAVs).
It also focuses on the Product Liability Directive (PLD). The PLD Directive, as interpreted by the
Court of Justice of the European Union, sets rules for the liability of producers and rights of
consumers. This framework is based on a moderately strict liability regime, and is applicable to
car manufacturers.
We adopt a mixed method approach for the analysis, using both qualitative and quantitative
approaches. First we undertake qualitative interviews with key stakeholders (including car
manufacturers, insurers, those from connected industries, those who provide services or
supervise compliance, as well as consumer agencies) to explore how the appropriateness of
existing liability regulation as well as amendments to European liability law on the deployment
and take-up of connected and autonomous vehicles might be influenced by amendments to
European liability laws. Second we conduct quantitative (economic) analysis of the possible
added value of these legislative changes on deployment.
We find that while product liability legislation is seen to be of critical importance for
producers when considering whether to bring new technologies to market, pre-emptive
legislation of the Product Liability Directive (PLD) to encourage deployment of connected and
autonomous vehicles is not required at this time.
While there is a preference for harmonisation, or minimisation of variation, of national liability
laws between manufacturers, insurers and those in connected industries, it was felt that such
harmonisation would not have a manifest impact on the roll-out of connected and autonomous
vehicles, given the substantial market pressure to roll out these vehicles. Moreover,
manufacturers will be planning to roll out FAVS in a number of countries, inside and outside the
EU, with differing liability laws.
Moreover, the quantitative analysis indicates that even if amendments to the PLD were able to
bring forward or speed up roll-out of FAVs, given the size of likely impacts, the social and
economic benefits to society are relatively small (noting that the quantitative analysis is sensitive
to assumptions regarding traveller productivity and sharing of vehicles, with higher levels of
productivity and sharing leading to higher societal benefits). It is noteworthy that the quantitative
analysis uses quite optimistic values for traveller productivity and even with higher levels of
vehicle sharing the societal benefits are still relatively small.
Further, the qualitative research with stakeholders found that most stakeholders felt that the
existing legislation was appropriate for connected and autonomous vehicles, particularly if
existing legislation and international treaties were interpreted in an open-minded way. Many felt
that it was simply too early in the innovation process and that it was important to learn what may
happen before introducing new legislation that could be detrimental to the roll-out and use of
these vehicles. There was also a view that it was not feasible to foresee and legislate for every

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 139
possible outcome, and that policymakers should not be afraid of the judicial process to determine
benchmarks.
Thus, we recommend no amendment to the PLD at this time.
However, there was near-unanimous agreement on the need for the PLD to work alongside other
Member States' regimes to ensure timely compensation for road accident victims.
Moreover, there are areas that could require legislation, particularly with regard to the use of
connected and autonomous vehicles, for example whether young children could travel
independently in these vehicles, as well as clarification of interpretation of specific issues, for
example whether the concept of 'a driver' in the Vienna Convention could encompass
autonomous driving, or whether individuals could be charged with criminal negligence if in an
accident in an autonomous vehicle they were not driving.
There will also be new risks, such as cyberattacks, hacking, etc., which will need to be taken into
account in assessment of liability.
During the research, stakeholders identified a number of areas where intervention would be
useful to improve the effectiveness of connected and fully autonomous vehicles. The first of these,
mentioned by nearly all interviewees, was in terms of access to accident and driving data to
enable accurate and timely liability judgements, including such areas as data standards, sharing,
and storage, as well as in terms of data privacy and protection. Such access may be required by
manufacturers, insurers, public authorities and travellers themselves. The second was in the area
of setting of vehicle standards more generally.

European Added Value Assessment
PE 615.635 140
Acknowledgements
We are grateful to all who contributed to this study. First we are grateful to Dr Tatjana Evas, from
the Directorate-General for Parliamentary Research Services, for her guidance throughout the
study. We also thank our quality reviewers – Mr. James M. Anderson of RAND and Professor
Simon Deakin of the University of Cambridge – for their helpful feedback on the report draft.
Most importantly, we are indebted to the host of external experts who so generously gave us their
time, expertise and insights in this important policy area. We emphasise, however, that the views
reflect in this report are those of the project team, who remain responsible for any errors or
omissions herein.
We would like to thank all of the people from the following agencies who agreed to participate
in interviews, including:
AGCOM
AGEAS
BMW Group
Dutch Ministry of Infrastructure and Environment
ERTICO – ITS Europe
FIA, Federation Internationale de l'Automobile
Hewlett Packard
Insurance Europe
Inter Mutuelles Assistances
Thatcham Research
Transport for London
Uber
Volvo Group

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 141
Chapter 1 Introduction
Background
The EU has a population of 501 million, who own some 252 million passenger cars. According to
the European Automobile Manufacturers Association (ACEA), there are 2.2 million people
directly employed in automotive manufacturing in Europe and a further 5.1 million jobs depend
on the related manufacturing, sales, maintenance and services sectors.
356
In addition, there were
2.3 million people working in high-tech manufacturing, and, for the EU28, the value of high-tech
exports represented 15.6 % of all exports in 2014.
357
According to some studies, 30 to 40 per cent
of the value in the automotive supply chain will pass through digital platforms in the near future
(EC, 2016). With the EU28 accounting for 21% of global passenger car production and almost 75%
of inland freight transported by road in Europe, the deployment of connected and autonomous
vehicles is likely to have a significant impact on the European economy. The deployment of
connected and autonomous vehicles is also expected to save lives as over 90% of road accidents
are a result of human error. A recent study has estimated that the overall future economic and
social benefits of connected and autonomous vehicles in the UK (only) could be in the region of
EUR 67 billion per year by 2030, generating 320,000 new jobs and saving over 2,500 lives.
358
Motor vehicles and road transport are already fairly heavily regulated, with the European Union
alone responsible for 1,776 regulatory acts related to 'motor vehicles'. In terms of civil liability
and insurance, the major area of interest for the Committee of Legal Affairs and this study, there
are two main pieces of EU legislation covering liability rules relating to motor vehicles. The first
of these, Directive 2009/103/EC (Motor Insurance Directive), is an EU framework establishing
third-party liability insurance cover for victims of road traffic accidents. This works alongside
national traffic accident rules on liability and the calculation of damages for victims, which vary
across Member States. The second, Product Liability Directive (85/374/EEC), is based on the
highly harmonised EU framework on liability of a producer of a defective product. Under this
Directive, the producer of a defective product must compensate personal injuries and damage to
private property irrespective of the negligence of an individual.
While some regulatory frameworks are being developed to cover road testing of autonomous
vehicles, there is little co-ordination between jurisdictions, and no evidence of anticipatory
legislative regimes for large-scale deployment.
359
For example, the UK Department for Transport
(DfT) has drawn up an action plan that includes a review of the existing set-up as regards liability,
vehicle use and safety that will also be informed by real-world testing.
360
It has also published a
Code of Practice for the testing of automated vehicle technologies. The European Commission's
GEAR discussion paper reports that it is now time to gain experience of real traffic conditions
with large-scale testing on EU roads and that, although currently no legal obstacles are foreseen,
for higher levels of automation, changes in EU legislation concerning the liability framework may
be needed.
361
There is concern that this lack of co-ordination could lead to unnecessary barriers
356
University of Buckingham Business School. 2014. The used car market report 2014. A report for BCA.
357
Eurostat (http://ec.europa.eu/eurostat/statistics-explained/index.php/High-tech_statistics)
358
KPMG. 2015. Connected and Autonomous Vehicles – the UK Economic Opportunity.
359
OECD. 2015. Automated and Autonomous Driving: Regulation under uncertainty.
360
DfT. 2015. The Pathway to Driverless Cars: Summary report and action plan.
361
European Commission. 2016. GEAR 2030 Discussion Paper, Roadmap on Highly Automated Vehicles.

European Added Value Assessment
PE 615.635 142
for the development and deployment of new technical solutions. Further, there is concern that
liability legislation may be a significant barrier for manufacturers and designers of autonomous
vehicles.
362
1. Definitions and context
According to an Organisation for Economic Co-operation and Development (OECD) study,
363
automated driving encompasses a wide range of technologies and infrastructures, capabilities
and contexts, use cases and business cases, and products and services. Many cars sold today are
already fitted with some degree of automation technology, while the deployment of fully
autonomous vehicles will depend on continued development of technical innovations and policy
choices. The OECD and KPMG (2015) reports both use the Society of Automotive Engineers'
(SAE) definition of automation, with six levels of automation (L0-L5), L5 being fully automated
with no driver required. Anderson et al (2014)
364
use a similar five-point classification scale from
the US National Highway Traffic Safety Administration (NHTSA); in this case the car can drive
itself without a human driver at Level 4. None of these scales makes a distinction between
connected and autonomous vehicles, because whether a vehicle is connected or not is only
roughly correlated with its level of automation.
An EPRS (2016)
365
briefing document on automated vehicles distinguishes between connected
vehicles on the one hand – for which communication between vehicles and infrastructure is made
via the internet – and cooperative Intelligent Transport Systems (ITS) on the other – which enable
direct communication between vehicles and infrastructure. Hence, while a vehicle may be
capable of driving without a human driver (i.e. travel autonomously), the method by which this
is enabled, i.e. whether it is not at all connected, or connected to other vehicles and/or
infrastructure, may have quite different implications for liability. Vehicles that connect with the
infrastructure will involve different actors than those that sense the environment around them;
they may also have different safety characteristics.
In this study we focus on the liability and social and economic impacts of SAE L5 fully
autonomous vehicles or self-driving vehicles (referred to as FAVs throughout this
document).
366
We do not distinguish between the different options for how the automation is
enabled, insofar as the social or economic benefits; although we will examine the role of the
suppliers of subsidiary or component parts that enable the automation in the consideration of
liability.
362
DfT, 2015. OECD, 2015.
363
OECD, 2015.
364
Anderson, James M., Nidhi Kalra, Karlyn D. Stanley, Paul Sorensen, Constantine Samaras & Oluwatobi
A. Oluwatola. 2016. Autonomous Vehicle Technology: A Guide for Policymakers. Santa Monica, Calif.:
RAND Corporation. RR-443-2.
365
European Parliament. 2016. Briefing. Automated vehicles in the EU.
366
This paper therefore does not deal with 'semi-autonomous vehicles' or with issues arising specifically out
of the testing phase for the technology. It is assumed that although some Member States consider that they
will face legal difficulties in testing FAVs, for example arising out of the Vienna Convention on Road Traffic
of 1968 (see next section), since five Member States are not bound by that Convention, testing of FAVs will
be permitted within the EU and the liability issues that arise are matters solely for those Member States.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 143
Table 1: SAE and NHTSA levels of automation
SAE level
Definition
NHTSA
level
Definition
Zero – no
automation
The full-time performance by the human
driver of all aspects of the dynamic driving
task, even when enhanced by warning or
intervention systems.
Zero – no
automation
The driver is 'in complete and sole control of
the primary vehicle controls (brake, steering,
throttle and motive power) at all times and is
solely responsible for monitoring the roadway
and for safe operation of all vehicle controls'.
One – driver
assistance
The driving mode-specific execution by a
driver assistance system of either steering or
acceleration/deceleration using information
about the driving environment and with the
expectation that the human driver perform
all remaining aspects of the dynamic driving
tasks.sk.
One –
function-
specific
The vehicle is able to 'assist or augment the
driver in operating one of the primary controls
– either steering or braking/throttle controls
(but not both)'.
Two –
partial
automation
The driving mode-specific execution by one
or more driver assistance systems of both
steering and acceleration/deceleration using
information about the driving environment
and with the expectation that the human
driver perform all remaining aspects of the
dynamic driving task.
Two –
combined
function
The vehicle is able to coordinate two or more
'primary functions' simultaneously, but a
driver remains in overall control.
Three –
conditional
automation
The driving mode-specific performance by
an automated driving system of all aspects of
the dynamic driving task with the
expectation that the human driver will
respond appropriately to a request to
intervene.
Three –
limited self-
driving
The vehicle is able to control all 'safety-critical
functions under certain traffic or
environmental conditions', but would need to
relinquish control to a driver on occasion to
deal with more complex driving scenarios.
Four – high
automation
The driving mode-specific performance by
an automated driving system of all aspects of
the dynamic driving task, even if a human
driver does not respond appropriately to a
request to intervene.
Four – full
self-driving
'[V]ehicle is designed to perform all safety-
critical driving functions and monitor roadway
conditions for an entire trip'. The vehicle may
be occupied or unoccupied, and is solely
responsible for safe operation.
Five – full
automation
The full-time performance by an automated
driving system of all aspects of the dynamic
driving task under all roadway and
environmental conditions.
Sources: based on OECD (2015), adapted from SAE Standard J3016 (SAE, 2014) and NHTSA,
2013, 4–5.
2. Key liability and insurance issues
The large-scale adoption of autonomous vehicles would in practice transform the basis of liability
for road traffic accidents. At present, liability focuses on the individual driver or owner of the
vehicle.
367
The applicable rule varies from Member State to Member State. In some, the traditional
367
Note that the current state of the law on these topics is dealt with in extensive detail in the following
paper, commissioned at the same time as this study:
E.F.D. Engelhard and R.W. de Bruin, EU Common Approach on the liability rules and insurance related to
Connected and Autonomous Vehicles: Legal Analysis, Annex I in Evas, T., European Added Value
Assessment: EU Common Approach on the Liability Rules and Insurance related to Connected and Autonomous
Vehicles, European Parliament Research Service, Brussels, 2016. We provide only a summary here.

European Added Value Assessment
PE 615.635 144
rule that there is no liability without fault still applies (e.g. UK, Ireland and Cyprus). In many
other Member States, fault has been replaced by strict liability,
368
but with significant variations
in its application (for example, in some Member States fault on the part of the victim is irrelevant
whereas in others it results in a reduction in the compensation awarded). In others still, although
the underlying rule might be strict liability, in practice losses arising out of injuries from road
accidents are dealt with by the social security system. EU law does not require any approximation
of these regimes, in the sense that the substance of the law is changed, but it does require Member
States to establish compulsory insurance against whatever form of liability is locally in force. In
addition, the Rome II regulation governs cross-border accidents, guiding the choice of legal
regime to apply when accidents occur outside the habitual residence of the participants. Some
Member States, however, continue to apply instead the older Hague Conventions.
369
One issue of international law will, however, need to be dealt with before FAVs can be deployed
in many parts of Europe. Twenty-three out of 28 Member States are bound by the Vienna
Convention on Road Traffic of 1968, which is widely (though not necessarily correctly)
interpreted as imposing a requirement that all road vehicles must have a human 'driver'. That
requirement would rule out FAVs in those countries. Even the amendment to the Convention
proposed by Austria, Belgium, France, Germany and Italy in 2014 that it should be sufficient that
a 'driver' can override or switch off the autonomous system would pose problems for full level 5
autonomy, which is usually understood as removing human intervention even as a back-up
system. The possible solutions include: further amendment of the Convention to allow full
autonomy; reinterpretation of the term 'driver' under the Convention to include remote control
by a non-human driver (for example a service company); and inclusion in all FAV vehicles of an
'off-switch'. The third solution is not only technically unsatisfactory – the sudden turning off of
the system is likely in many situations to be more dangerous than leaving it on – but also likely
to give rise to domestic legal problems. Could non-use of the off-switch count as negligence in
states operating a fault system? Would all occupants of a FAV within reach of the off-switch count
as having 'control' of the vehicle in Member States imposing strict liability on that basis? In
Member States that impose liability on 'holders' of vehicles, would the existence of an off-switch
render any of the occupants of the vehicle potentially liable? The other solutions would be
preferable. Such issues, however, are not discussed in this research paper, which focuses on EU
liability rules.
The widespread use of autonomous vehicles would shift attention to the liability not of the owner
of the vehicle (or its 'driver', a concept that loses its engineering if not its legal meaning in a fully
autonomous vehicle) but to the liability of the manufacturer of the vehicle. Accidents might be
attributable to the design of the vehicle, or its manufacture, or to the design or manufacture of its
component parts, including the software it uses. That is the world of product liability, which is
governed by existing law at the European level requiring Member States to adopt essentially the
368
In law, strict liability is a standard for liability which may exist in either a criminal or civil context. A
rule specifying strict liability makes a person legally responsible for the damage and loss caused by
his/her acts and omissions regardless of culpability. Under strict liability, there is no requirement to prove
fault, negligence or intention.
369
See the following for a discussion of the Rome II regulation and Hague convention:
http://www.europarl.europa.eu/document/activities/cont/201212/20121219ATT58306/20121219ATT58
306EN.pdf
http://www.biicl.org/files/5200_graziano_27-09-10_biicl_1.pdf

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 145
same system of strict liability for personal injury and damage to personal property caused by
'defective' products.
In Member States currently operating regimes based on fault for road traffic accidents, the
liability of owners or drivers will become very difficult to prove since the owner or driver would
have done no more than a passenger on a train or an aeroplane to affect the way the vehicle
operates. In those states, the principal recourse of victims will be against manufacturers in
product liability. An additional possible defendant would be commercial suppliers of FAV
services who hire the services of their vehicles out to individuals. Those suppliers are also
potentially liable in product liability, but they might also be liable under general Member State
civil responsibility regimes (again often fault-based) or consumer protection regimes. In Member
States operating strict liability regimes, victims might still be able to sue owners (or 'keepers' or
'holders' or 'users') of motor vehicles, although that might depend on precisely how the strict
liability regime works. One can, for example, imagine that regimes, such as the French, which are
based on concepts of 'control', might conclude that the owner of an autonomous vehicle is not in
'control' of it in any relevant way and that the relevant 'controller' is the manufacturer or designer
of the vehicle or the commercial supplier of FAV services. But even where strict liability regimes
continue to hold owners of vehicles liable, and the ultimate private customers for FAVs rather
than the service providers continue to own their vehicles (a scenario that might be thought
unlikely), those owners, or their insurers, would seek to join manufacturers or suppliers as
defendants using product liability or the local civil liability regime, thereby reducing their own
exposure. In both sorts of regime one would therefore expect insurance premiums for private
customers of FAV vehicles to fall, perhaps radically.
The main issue to consider is whether the Union's product liability regime (under the Product
Liability Directive) is appropriate for autonomous vehicles.
The Product Liability Directive (PLD) establishes a framework for liability regime for producers
that, inter alia, is applicable to car manufacturers.
370
The PLD Directive, as interpreted by the
Court of Justice of the European Union, set rules for the liability of producers and rights of
consumers. This framework is based on a moderately strict liability regime.
371
A producer of a
defective product must compensate personal injuries and damage to private property
irrespective of the negligence of any individual. Defectiveness is defined as failing to provide the
degree of safety persons generally are entitled to expect. The rights of consumers to claim
damages under provisions of the PLD cannot be limited by the contractual clauses included by
the producer.
372
The PLD, however, provides a limited list of defences in Article 7 PLD, including
the development risks defence that there is no liability if 'the state of scientific and technical
knowledge at the time when he put the product into circulation was not such as to enable the
existence of the defect to be discovered'. Another defence may arise under Article 8(2), which
permits Member States to provide for contributory fault on the part of victims to reduce or
disallow liability. In addition, some national rules on civil liability still apply, for example on non-
material damage in personal injury, and how liability is apportioned among multiple defendants.
370
For review of the application in the MS, see Fourth report on the application of Council Directive
85/374/EEC of 25 July 1985 on the approximation of the laws, regulations and administrative provisions of
the Member States concerning liability for defective products, amended by Directive 1999/34/EC of the
European Parliament and of the Council of 10 May 1999.
371
Article 1, PLD
372
Preamble and Article 13, PLD.

European Added Value Assessment
PE 615.635 146
Road accidents will remain 'bilateral' in the sense that the behaviour of both injurers and victims
will continue to contribute to the risks that accidents will happen. For example, inattention by
pedestrians, and the extent to which other road users choose to travel, will still be positively
correlated with the accident rate. But since the PLD includes a contributory negligence defence,
the legal regime would continue to take the bilateral nature of road accidents into account. The
only practical difference would be that contributory negligence on the part of other drivers would
no longer be relevant, for the simple reason that FAVs have no drivers.
373
Strict liability has both advantages and disadvantages. Unlike fault regimes, it provides
incentives for potential causers of accidents to control, in a cost-justified way, the extent to which
they engage in risky activities overall, and not just to comply with legal standards on the
occasions they happen to engage in the activity. On the other hand, even when combined with a
rule reducing or eliminating compensation in cases of contributory negligence, strict liability does
not provide incentives for potential accident victims to set their own activity levels at cost-
justified levels.
374
The extent to which this gap matters in practice, however, depends on the
degree to which potential victims already limit their exposure to risk regardless of the legal
liability regime, for the obvious reason that they want to avoid pain, injury and death.
Another alleged advantage of strict liability over fault is that it tends to reduce process costs and
thus overall transaction costs. The argument is that fault requires victims to establish precisely
who did what – in the case of a FAV, for example, who made which mistake in producing the
software or the hardware of the vehicle – whereas in strict liability the victim has no need to
discover these details. It is not clear, however, that this amounts to a very big advantage. Even in
strict liability the victim has to prove causation, which is not necessarily cheap to establish. In
addition, the claims processing industry in fault-based jurisdictions has been able to standardise
claims and so benefit from economies of scale.
Among strict liability's other disadvantages is that in its pure form it does not allow a court to
take into account the positive externalities
375
a product might engender. In extreme cases, for
example liability for damage caused by vaccines, strict liability can prevent a socially beneficial
product from reaching the market. Extending this to FAV technology, potential defendants (in
this case manufacturers) will react to liability rules according to the prospective private costs to
them, not the net social benefits of their activity, so a situation could possibly arise in which the
private costs of the manufacturer would be greater than their prospective profits from the activity
373
In some jurisdictions the effect of shifting to the PLD will paradoxically be to bring back contributory
negligence. In France, for example, road accidents are currently governed by a strict liability rule that does
not include a contributory negligence rule. France's implementation of the PLD, however, does in include
contributory negligence (see Cc 1245-12 (previously 1386-12)). France will thus move from a regime that
assumes road accidents are unilateral to one that assumes they are bilateral. From an economic point of view
this change might result in a small improvement in efficiency, although probably only with respect to
property damage.
374
R. Cooter and T. Ulen, Law and Economics 6th edition (Boston: Addison-Wesley, 2012) Table 6.2 at p. 204
375
Externalities arise when an actor does not take into account the impact of his actions on others. In the case
of conventional motor vehicles, each vehicle on the road increases the risk of accidents for all vehicles; this
is a negative externality. Adding AVs to the network, on the other hand, does not increase the risk of
accidents and in fact can be thought of as decreasing the risk for conventional road users – a positive
externality.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 147
even where the social benefits would have outweighed the social costs. On the other hand, many
commentaries on the current regime stress that it is not a pure form of strict liability, which would
mean holding defendants liable for any damage caused by their product, but in a modified form
requiring the claimant to show above all that the damage was caused by a 'defect' in the product,
where 'defective' means that the product did not provide the degree of safety that persons
generally are entitled to expect. It is not, however, entirely clear whether the social benefits of the
product are to be taken into account. At least one judge has said that, at least in some kinds of
case, they are not to be taken into account.
376
It might be that the only necessary reform would be
to ensure that 'defective' is interpreted so that its application must take into account a product's
social benefits.
Current product liability law is not entirely clear on a number of other issues. The small number
of claims based on it, especially in comparison to the number of road traffic accident claims,
means that questions have remained unanswered for thirty years. Among these is the highly
relevant question of whether software itself, as a component separate from the physical product
which it operates, counts as a product, an issue that divides experts.
377
In addition, some of the
rules established in 1985 are arguably inappropriate for a world of autonomous vehicles, for
example a long-stop limitation period of ten years since the product was put into circulation. In
a Member State operating a fault regime for road traffic accidents, the effect of a ten year
limitation period would be that there might be no liability at all for accidents involving old
autonomous vehicles. A related issue is the extent to which repairs or updates can cut off liability
– the rule that no liability attaches to a product where 'the defect which caused the damage did
not exist at the time when the product was put into circulation by him or that this defect came
into being afterward' (Directive 85/374/EEC art 7) might need to be reconsidered. A related issue
is the question of the liability of intermediate suppliers, such as the commercial suppliers of FAV
services. Currently they can entirely escape liability under the Directive if they identify who
supplied the product to them, a process that continues back either to the manufacturer or the first
importer of the product into the EU (Directive 85/374/EEC art 3(3)).
Another set of issues arises out of the regulation of cross-border accidents. Both Rome II and the
Hague Conventions treat products liability and road traffic accident cases differently. This
difference will not have mattered when the two types of case were mutually exclusive, but will
come to matter when all road traffic accident cases are also potentially product liability cases.
Objectives and scope of this paper
376
Burton J. In A v National Blood Authority (Hepatitis C Litigation) no 1 [2001] 3 All E.R. 289. See M. Jones et
al Clerk and Lindsell on Torts 21
st
edition (London: Sweet and Maxwell, 2015) 11.60 (commenting that Burton
J.'s view might not be correct in other circumstances). See also e.g. C. Johnston, 'A personal (and selective)
iintroduction to product liability law' (2012) 1 Journal of Personal Injury Law 1-17, agreeing with C.J. Miller
and R. Goldberg, Product Liability, 2nd edition (Oxford: OUP, 2004) para.10.86 p.385 that Burton J.'s view is
'controversial'.
377
See generally the discussion in S. Saxby (ed.) Encyclopedia of Information Technology Law (London: Sweet
and Maxwell, 2016) 7.132. For the view that software is not a 'product' see e.g. C. Walton et al, Charlesworth
and Percy On Negligence 13
th
edition (London: Sweet and Maxwell, 2015) 15.14-15.15. For the view that
software supplied on a physical medium counts as a 'product' but not software downloaded from the
Internet, see e.g. M. Jones et al Clerk and Lindsell on Torts 21
st
edition (London: Sweet and Maxwell, 2015)
11.51.

European Added Value Assessment
PE 615.635 148
The objective of this research paper is to provide an evidence-based assessment of the possible
added value that development of EU rules on the liability and insurance related to the testing,
deployment and use of connected and autonomous vehicles in the European Union can bring.
Specifically, the research paper identifies potential opportunities and gaps of the current EU
legislative framework on liability and insurance related to motor vehicles and provide estimates
on the possible benefits and costs of failure to take a common EU approach considering
technological developments in the area of connected and autonomous vehicles.
We adopt a mixed method approach for the analysis, using both qualitative and quantitative
approaches. First, we undertake qualitative interviews with key stakeholders, including car
manufacturers, insurers, those from connected industries and those who provide services or
supervise compliance, to explore the appropriateness of existing liability regulation as well as
how deployment of connected and autonomous vehicles might be influenced by amendments to
European liability laws. Second, we undertake quantitative (economic) analysis of the possible
added value due to changes in deployment as a result of legislative changes. The research paper
discusses policy options that the EU could possibly adopt in the area of connected and driverless
cars, and the benefits and challenges that each option would entail.
Structure of the paper
This research paper is structured as follows:
Chapter 2 sets out the proposed legislative policy options and the findings from in-
depth interviews with stakeholders.
Chapter 3 sets out the cost-benefit analysis (CBA) to quantify the social and economic
costs and benefits of the legislative options.
Chapter 4 assesses the legislative policy options and provides recommendations.
Each chapter of the report commences with a non-technical summary of the research activities,
describes the methodologies and highlights the key findings relevant to the chapter (where
relevant at this stage of the research).

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 149
Chapter 2 Stakeholders' views of amendments to the Product
Liability Directive
Summary and key findings
Research activities: This chapter sets stakeholders' views of potential amendments to the Product
Liability Directive (PLD). The findings are derived from in-depth interviews with 13 key
stakeholders including vehicle manufacturers, insurers, those from connected industries and
those who provide services or supervise compliance, exploring the appropriateness of existing
liability regulation as well as how deployment of connected and autonomous vehicles might be
influenced by amendments to European liability laws.
In the interviews we discussed four legislative policy options (summarised below). These allow
quantification of a common approach to legislation at EU level (Baseline-Divergence), as well as
the introduction of further legislation to pre-empt variation by Member States:
Option 1 (Baseline): The law as it is, with no adaptations for FAVs.
Option 2 (Divergence): The law at EU level as it is, but with significant new variations
introduced by Member States.
Option 3 (Pro-industry harmonisation): EU legislation to pre-empt variation by Member
States, with the changes favouring the producers and suppliers of autonomous vehicles.
Option 4 (Pro-victim harmonisation): EU legislation to pre-empt variation by Member States,
with the changes favouring road accident victims.
Key findings:
Below we summarise the key findings from the interviews:
Product liability legislation is of critical importance for producers when considering whether
to bring new technologies to market, but the PLD is good enough as it is.
However, the PLD needs to work alongside other Member State regimes to ensure timely
compensation for road accident victims.
Harmonisation of liability laws across Member States is preferable, but divergence would not
have a substantial impact on roll-out of autonomous and connected vehicles.
Pre-emptive amendments to the PLD are not required, but if amendments are made they
need to ensure fair treatment of producers and victims.
Policymakers should not rush to provide new liability legislation: it is too early in the
innovation process, and the risk of suboptimal legislation, potentially locking in unintended
consequences, is a danger. However, legislation might be required in areas of use of
connected and autonomous vehicles, clarification of interpretation of specific issues, e.g.
whether the concept of 'a driver' in the Vienna Convention could encompass autonomous
driving, and whether individuals could be charged with criminal negligence if in an accident
in an autonomous vehicle they were not driving. Finally, there will be new risks, such as
cyberattacks, hacking, etc., which will need to be taken into account in assessment of liability.
Interventions may be required: (i) to ensure access to accident and driving data to enable
accurate and timely liability judgements, including in areas such as setting of data standards,
sharing and storage, as well as in terms of data privacy and protection; and (ii) to set vehicle
standards.

European Added Value Assessment
PE 615.635 150
Proposed legislative policy options
In this study we aim to explore whether and how changes to the PLD might influence deployment
of connected and autonomous vehicles. We do this by exploring the impacts of four legislative
options, as described below. These have been purposefully specified to be relatively
straightforward to allow discussion within an interview context, across a range of stakeholders.
They have also been purposefully defined to reflect legislative extremes to give us the
opportunity to identify impacts.
The first option is a baseline, no change, which will set out the basis for comparison. Option 2
assumes increased divergence of legislation across Member States, which allows quantification
of the value of coordination, relative to the baseline. Options 3 and 4 set out possibilities for
further harmonisation, with Option 3 introducing further legislation supporting industry and
Option 4 introducing further legislation supporting victims.
Option 1 (Baseline): The law as it is, with no adaptations for FAVs
The applicable law for fully autonomous vehicles will consist mainly of a rule (under EU law) of
strict liability for producers for damage caused by defective products, defective being defined as
'not as safe as people generally are entitled to expect'. Liability is only for death or personal injury,
or damage to personal property worth more than €500. Producers, which includes manufacturers,
component makers and first importers into the EU, are able to defend themselves on the basis of
a 'development risks' defence – that the state of scientific and technical knowledge at the time the
product was put into circulation was not such as to enable the existence of the defect to be
discovered. In addition, producers are not liable for defects that arise after they put the product
into circulation. Producers can also reduce their liability if those injured were at fault. Victims
have three years from the date of their injury to sue and the possibility of liability runs out entirely
ten years after the product was put into circulation. Unlike drivers of conventional cars,
producers of autonomous vehicles are not subject to an obligation to take out insurance.
Suppliers of the services of autonomous vehicles are potentially liable under these rules, but they
can escape liability simply by revealing who supplied the vehicles to them, a process that can
continue until responsibility is pinned on the manufacturer or the first importer into the EU.
The existing law is uncertain in some respects: e.g. it is not clear whether software counts as a
'product' or whether the social benefits of a product can be taken into account in deciding whether
it is 'defective'.
Other liability rules might also be relevant in some circumstances. For example, companies that
supply the services of autonomous vehicles to consumers might be sued on the basis of other
legal rules providing for compensation to accident victims. These rules vary across Member States
of the EU. In the UK for example, accident victims other than the person who paid for the services
of an FAV would have to prove that the service provider was at fault in the way they had behaved
in relation to the FAV, but in France such victims would have only to prove that the service
supplier had control over the behaviour of the FAV.
Option 2 (Divergence): The law at EU level as it is but with significant new variations
introduced by Member States

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 151
One way in which the law might develop is that different Member States of the EU might
introduce their own national regimes dealing with FAVs, taking advantage of the ambiguities
and gaps in existing EU law. For example, some might declare that software is not a product and
others that it is a product. Some might declare that if victims are at fault in an accident involving
an FAV they lose all rights to compensation, while others might declare that they lose none of
their compensation. Some might restrict the application of the development risks defence in cases
involving autonomous vehicles and some might allow it to apply to its maximum effect.
The different additional national rules relevant to the liability of suppliers of the services of FAV
vehicles might also come to diverge more. For example, some Member States might carve out
regimes for FAV service providers protecting them from any additional liability but others might
take the opposite view and make them liable without proof of fault, regardless of the position in
product liability law. This divergence might particularly happen with regard to accidents
involving pedestrians. For example, in some Member States pedestrians might lose their right to
sue if they failed to cross the road at authorised points (the equivalent of the US 'jaywalking' laws)
but in others the change in the law might be in the opposite direction, allowing them to claim full
compensation even if they were at fault.
Option 3 (Pro-industry harmonisation): EU legislation to pre-empt variation by Member
States, with the changes favouring the producers and suppliers of autonomous vehicles
Another way the law might develop is for the EU to pass legislation that precludes Member States
making different rules, and resolving the current legal issues in ways that favour the producers
and suppliers of autonomous vehicles. For example, it might ensure that software does not count
as a product, that the social benefits of autonomous vehicles should be taken into account in
judging whether a vehicle was defective, and that any fault on the part of victims removes their
right to compensation entirely.
The EU might also establish that FAV service providers cannot be sued except as 'suppliers' under
the EU PLD, meaning that they would escape all liability, including liabilities under additional
national law, if they inform victims about who supplied the vehicles to them.
Option 4 (Pro-victim harmonisation): EU legislation to pre-empt variation by Member States,
with the changes favouring road accident victims
The final way the law might develop is that the EU might pass legislation that precludes Member
States making different rules but resolving the issues in favour of road accident victims, for
example declaring software to be a product, excluding social benefits from the issue of
defectiveness, removing any defence based on the fault of the victim and requiring all producers
to take out insurance.
On the liability of FAV service providers, the EU might make them liable as producers in their
own right, regardless of what information they gave to victims, and might require them to carry
insurance to cover that liability.

European Added Value Assessment
PE 615.635 152
Stakeholders' views on the legislative options
In June and July 2016, in-depth interviews were held with 13 stakeholders:
2 Manufacturers
4 Insurers
3 Connected industries
3 Service providers or those who supervise compliance
1 Consumer agency.
All interviews were undertaken by telephone and took between 45 minutes and an hour.
Interview participants came from a number of EU countries, including France, Germany, Italy,
The Netherlands, Sweden and the UK. Consent for interviews was obtained from all interview
participants prior to conducting the interview. All participants were also instructed that their
participation in the interview was voluntary and that the interview could be concluded at any
time (no interview was concluded early).
The interviews used a semi-structured format. Prior to the interview, participants were sent a 1-
page information sheet (see Appendix A) setting out the aims of the study and the four legislative
policy options.
Below we set out the key themes emerging from the interviews.
The PLD is good enough as it is
While stakeholders felt that product liability legislation is of critical importance for producers
when considering whether to bring new technologies to market, there was near-unanimous
agreement that the PLD did not need amendment to cover roll-out of connected and autonomous
vehicles. For most, the PLD was judged to be 'good enough as it is', providing balance between
industry and consumer protection. The small numbers who disagreed did not say that the PLD
was not good enough, but rather that there was currently no evidence that it was not working (as
opposed to full agreement that it was working). A small number of interviewees felt they needed
to check the details of the PLD in more detail.
Many interviewees felt that the existing ambiguities identified in the PLD (and highlighted in the
scenarios) were not an issue. Specifically, nearly all felt that software would be covered under the
PLD, and that 'reasonableness' and social benefits are taken into account when assigning liability.
Further, most participants felt that legislators should not rush to provide new legislation as it was
too early in the innovation process and carried risks of suboptimal legislation, potentially locking
in unintended consequences.
But the PLD needs to continue to work alongside other Member State regimes to ensure timely
compensation for road accident victims
There was a very strong view, amongst insurers but also other stakeholders, that there was also
a need for personal automobile insurance, even for FAVs where the driver would not have
responsibility for the driving task but would be responsible for decisions about vehicle use, for

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 153
example in terms of who is using it, whether the conditions are appropriate, etc.. The key role of
such insurance would be to ensure timely compensation for victims of accidents, but it would
also cover cross-border incidents, non-driving accidents (for example if someone opens a door,
injuring a cyclist), theft and damage, as well as accidents with non-autonomous vehicles (referred
to as 'traditional' vehicles hereafter), which would remain a substantial component of the vehicle
fleet.
378
The Motor Insurance Directive (MID) was seen by many (6 of the 13 interviewees, including a
mix of those representing manufacturers, insurers and consumers) as an efficient legislative
vehicle for managing such insurance. Some argued that there may be benefits in future, with
increasing take-up of FAVs, to moving towards harmonisation with a strict liability insurance
system on the basis that driver fault would become immaterial. Behind the MID, insurers would
pursue liability claims with the manufacturer or producer through the PLD, as they do now. This
would probably happen more frequently in the case of FAVs, compared to now.
Others felt less strongly that insurance through the MID was needed, with a move of liability to
manufacturers or to new providers who may provide cover for all travel, regardless of mode; but
they also felt strongly that, whatever final system emerged, it needed to ensure that victims are
compensated in a fair and timely manner.
A number of interviewees thought that insurance may change substantially, with insurance
premiums being much more personalised to people's travel choices and risks, and that such
products are bound to be developed, with increasing data on travel.
Harmonised liability laws across Member States are preferable, but divergence would not
have a substantial impact on roll-out of autonomous and connected vehicles
In Option 2 we explored an option of increased divergence of laws across Member States. Nearly
all participants felt that harmonised liability laws across Member States were preferable to an
option with increasing divergence. For example, some felt there may be benefits in limiting
variation between national liability laws between Member States.
379
It was felt that such
divergence would, however, not impact roll-out of connected and autonomous vehicles, given
the substantial market pressure to roll out these vehicles, and that manufacturers will be rolling
them out in numbers of countries, inside and outside the EU, with differing liability laws. For
producers and manufacturers, having to operate across a number of countries with different laws
may increase their costs, but these costs would ultimately be passed on to consumers. In terms of
insurance, many felt that insurance was largely a 'local business' and that premiums already vary
substantially across countries, taking account of differences in risks, system efficiency, etc.
A small number of respondents (2 out of 13) felt that divergence (and experimentation) would be
beneficial in terms of providing valuable evidence on the effectiveness of different approaches.
378
Although it is undoubtedly true that Member State regimes designed to ensure the rapid payment of
compensation to victims will need to be amended to ensure that liability grounded in the PLD is included,
the need for users of FAVs, who are essentially all passengers in the vehicle, to have liability insurance is far
from clear. Passengers in cars and taxis are not currently required to carry liability insurance for the simple
reason that they are hardly ever liable for anything. There is real risk here of insurance being mis-sold.
379
The PLD allows variation only in limited areas (for example in national laws on non-material damage,
extending time limits for actions and rights of recourse), but other variations beyond the scope of the
Directive itself might be attempted, for example with regard to compulsory insurance for product liability.

European Added Value Assessment
PE 615.635 154
No one felt that these variations would be important enough to impact deployment or take-up of
FAVs.
Some interviewees felt that there may be benefits in harmonisation of motor insurance laws to
ensure victims are compensated in a timely manner, and that there may be benefits in moving to
a system assuming strict liability with roll-out of FAVs.
Pre-emptive amendments to the PLD are not required, but if amendments are made they need
to ensure fair treatment of producers and victims
When exploring options 3 and 4, again most interviewees were of the view that no pre-emptive
amendments to the PLD were required. But if amendments were made they should reflect a
balance between the producer and the victim: a balance between options 3 and 4, leaning towards
Option 4. Many interviewees emphasised that if legislative changes were made, these needed to
protect victims, because the reputation of autonomous vehicles and social acceptance was
ultimately important for market acceptance.
Many interpreted the example amendments as already being part of the PLD, for example,
inclusion of software (Option 4), including social benefits of FAVs in judging effectiveness
(Option 3). Many expected that 'reasonableness' would prevail in terms of assigning fault and
liability, in terms of fault of victims.
Again, most felt that unless draconian changes were made, such changes were unlikely to have
an impact on roll-out of autonomous and connected vehicles, although some interviewees
thought they could have some impact (increasing take-up between 5-10%).
Do not legislate too early
Overall, there was a view that policymakers should not legislate too early. There was a view that
existing legislation was appropriate for connected and autonomous vehicles, particularly if
existing legislation and international treaties were interpreted in an open-minded way. Further,
many felt that it was simply too early in the innovation process and that it was important to learn
what may happen before introducing new legislation that could be detrimental to roll-out and
use of these vehicles. There was also a view that it was not feasible to foresee and legislate for
every possible outcome, and that we should not be afraid of the judicial process to determine
benchmarks.
Areas that could require legislation would be on issues of use of connected and autonomous
vehicles, for example whether young children could travel independently in these vehicles. A few
interviewees noted that it may be useful for the European Commission to provide clarity on
specific issues, for example whether interpretation of 'drivers' in the Vienna Convention could
encompass autonomous driving. A few interviewees mentioned concerns regarding criminal
liability legislation, specifically whether a person could be charged with criminal negligence
while in an autonomous vehicle even if they were not driving. Others noted that there will be
new risks, such as cyberattacks, hacking, etc., which will need to be taken into account in
assessment of liability.
One interviewee asked whether it was time for new international legislation on road safety more
generally.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 155
Key areas where intervention would be valuable
Interviewees noted a number of areas where intervention would be useful to improve the
effectiveness of connected and fully autonomous vehicles.
The first of these, mentioned by nearly all interviewees, was in terms of access to accident and
driving data to enable accurate and timely liability judgements, including such areas as data
standards, sharing, and storage, as well as in terms of data privacy and protection. Such access
may be required by manufacturers, insurers, public authorities and travellers themselves. The
second was in the area of setting of vehicle standards more generally.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 157
Chapter 3 Quantifying the socio-economic costs and
benefits of the legislative options
Summary
Research activities: This chapter responds to the research objective to quantify the
additional value from an EU common approach on liability and insurance related to
connected and driverless cars compared to what could be achieved by Member States at
national or international levels without EU action.
Methodologies: We undertake cost-benefit analysis (CBA) to quantify the socio-economic
costs and benefits of changes to the rate of roll-out and take-up of FAVs as a result of
different legislative options. We use a Net Present Value approach, including the following
potential benefits as a result of FAVs:
Reductions in journey travel time due to more efficient use of road capacity
Increased productivity of travellers (reductions in travellers' values of time)
Reductions of driver costs for freight vehicles
Possible increases in the amount of travel, as a result of increased ease of travel
Reductions in vehicle accidents
Reduction in air pollution, due to more efficient driving
Changes in insurance costs due to a combination of reduced accident risk and liability
regime
Potential loss of revenue for public transport providers
Potential loss in tax revenue (indirect taxation, e.g. on insurance)
Wider economic impacts from transport on productivity and competitiveness.
The CBA explores costs and benefits for different stakeholders, including:
Travellers
Non-travellers, more widely
Transport service providers/operators
Producers, e.g. automobile manufacturers, insurance and components providers
The rest of the economy
Governments (Member State governments and EU institutions).
The data underpinning the impact on roll-out rates of FAVs come from interviews with
key stakeholders, including car manufacturers, insurers, connected industries and those
who provide public provision of services and supervise compliance. All other data are
based on values and estimates from the literature.
Key findings:
The societal benefits of earlier (5 years earlier) or faster deployment are relatively small.
The key benefit of earlier or faster deployment is through reduced 'costs' of travel for
FAV users because FAVs are assumed to drive more efficiently and users are able to
be productive while travelling. Increases in travel efficiency also lead to benefits for
drivers of normal vehicles, as a result of reductions in congestion.
Assumptions regarding insurance costs, specifically whether insurance would be
required for FAV users or whether liability insurance costs would be passed on directly
from manufacturers or suppliers to users, are that these would also be small.
The analysis is sensitive to assumptions regarding traveller productivity and
assumptions regarding sharing of vehicles, with higher levels of productivity and
sharing leading to higher societal benefits.

European Added Value Assessment
PE 615.635 158
Background
In the interviews conducted with experts (discussed in Chapter 2), we found near-unanimous
agreement that the PLD did not need amendment to cover roll-out of connected and autonomous
vehicles and that although harmonised liability laws across Member States were preferable to
further divergence, this would not have a substantial impact on the roll-out of autonomous and
connected vehicles. In this chapter we explore the size of social and economic benefits of faster
roll-out and take-up of connected and autonomous vehicles to put into context the potential size
of societal benefits, even of small changes in roll-out and take-up. In addition, we examine the
effect of the two different insurance regimes. In the first of these, we assume that FAV users do
not need insurance and, in the second, that the insurance fully internalises the external accident
costs.
380
Finally, we undertake sensitivity analysis to show the importance of different
assumptions and parameters on the size of the calculated benefits; these include the value of time
for FAV users, the proportion of FAVs that are shared, and the level of accident risk for all road
vehicles.
Framework for quantifying the socio-economic costs and benefits
1. Cost-benefit methodology
We quantify social and economic costs and benefits of different legislative options through cost-
benefit analysis (CBA). CBA has been proposed as an evaluation tool in a wide range of settings;
for example, the European Commission (EC) has a published guide on the economic appraisal of
investment projects
381
and in the UK, HM Treasury's Green Book provides a framework for
appraisal or evaluation of a policy, project or programme.
382
A study for the EC Secretariat
General, on the assessment of the costs and benefits of EU regulation, also recommends and
presents guidance on the use of CBA.
383
With respect to the transport sector in particular, models that have been applied to study the
impact of policy options at the EU scale also provide a welfare analysis of this type.
384
These
quantify the impact of changes in travel costs on travel demand at a range of spatial levels and
for different stakeholders, depending on the policies of interest. In all cases, parameterisation and
calibration is required. European guidance has been published on values that could be used to
monetise impacts for use in CBA.
385
In some countries, there is a long tradition of CBA in
appraisal of transport projects that has in some cases been formalised.
386
WebTAG is the UK
Department for Transport's online transport appraisal tool, providing both framework and
parameters for the analysis. Together with the European guidance, this forms a useful starting
point for our assessment.
380
These can roughly be equated to options 3 and 4 from Chapter 2.
381
DG-Regio (2014): Guide to Cost-Benefit Analysis of Investment Projects. European Commission.
382
HM Treasury (2011): The Green Book - Appraisal and Evaluation in Central Government. London TSO.
383
CEPS (2013): Assessing the Costs and Benefits of Regulation. European Commission
384
Proost S, Dunkerley F, Van der Loo, S, Adler N, Bröcker J, Korzhenevych A (2013): Do the selected trans
European transport investments pass the cost benefit test? Transportation, 41, 107-132. TREMOVE and
PRIMES models are further examples used in EU 2050.
385
Ricardo-AEA (2014) Update of the Handbook on External Costs of Transport. European Commission.
386
For example, the UK, the Netherlands (Onderzoeksprogramma Economische Effecten Infrastruktuur)
and France ('le calcul economique')

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 159
CBA can be defined as a simplified welfare economic assessment based on a (partial) model of
the economy. A particular project is therefore assessed through its impacts on a limited number
of relevant markets and not the economy as a whole. A traditional transport CBA involves the
calculation of travel time savings and other benefits to transport users (relative to a baseline of
not having the project), which are then compared with the costs of the project. The spill-over
effects on other transport markets, the environment and the rest of the economy also need to be
taken into account, particularly where there are market distortions; labour market taxation is a
particular example here. Underpinning the CBA approach is the fact that in a perfectly
competitive economy, the direct transport benefits are equal to the final economic system
benefits. These primary benefits affect accessibility to activities and consequently economic
activity. Recently CBA has been expanded to account for market imperfections, particularly in
relation to regional growth (agglomeration
387
), productivity, competition and labour market
effects, which may give rise to additional, wider economic impacts not covered in the standard
CBA. These impacts can be calculated as add-ons to the standard CBA, following an approach
such as the one presented in the DfT WebTAG guidance.
388
The alternative would be a
comprehensive general equilibrium modelling approach, which has its own operational
limitations and is far beyond the scope of this study.
389
In this study we do not use a formal model to determine the impact of EU and government policy
on demand for FAV and other transport markets and non-transport markets in Europe. Instead
we rely on published data and data from expert interviews. Given the uncertainty associated with
the advent of driverless technology on the roads, we also have to make a number of assumptions
(see Appendix B). While we note the clear limitations of this approach, it allows us to assess the
impact on transport and other markets in a consistent way within the project constraints.
Although a more sophisticated model may offer some advantages, it would also need to rely on
assumptions to determine the demand for FAV and its impact on other markets.
2. Establishing the baseline and scenarios
The objective of the CBA exercise is to quantify how the benefits arising from the deployment of
FAVs may change under different liability regimes. We look at the benefits and costs of different
liability regimes for the FAV market from a European perspective. Some liability regimes may
result in transfers of producer profits and consumer benefits within the economy from one
Member State (MS) to another; the manufacturing sector in one country may benefit at the
expense of another, for example. Quantification of these effects is beyond the scope of this study.
Only overall impacts for the EU are calculated.
We assume that FAVs will be introduced, but the rate at which this happens depends on the
liability regime.
390
For the baseline, we assume that the existing law remains as it is, with no
particular adaptation for FAVs (see Chapter 2, Option 1). We then develop a number of scenarios
387
Agglomeration refers to the 'economic mass' accessible to firms (Graham and van Dender, 2009).
Reducing transport costs can reduce interaction costs in the spatial economy leading to agglomeration
externalities, such as labour market pooling, more efficient knowledge sharing and industry specialisation.
388
WebTAG Unit A2.1
389
See OECD (2011), Improving the Practice of Transport Project Appraisal, ITF Round Tables, No. 149 and
Proost et al, 2013 for further discussion of these issues.
390
Hence we do not compare the impact of FAVS with a baseline without these vehicles.
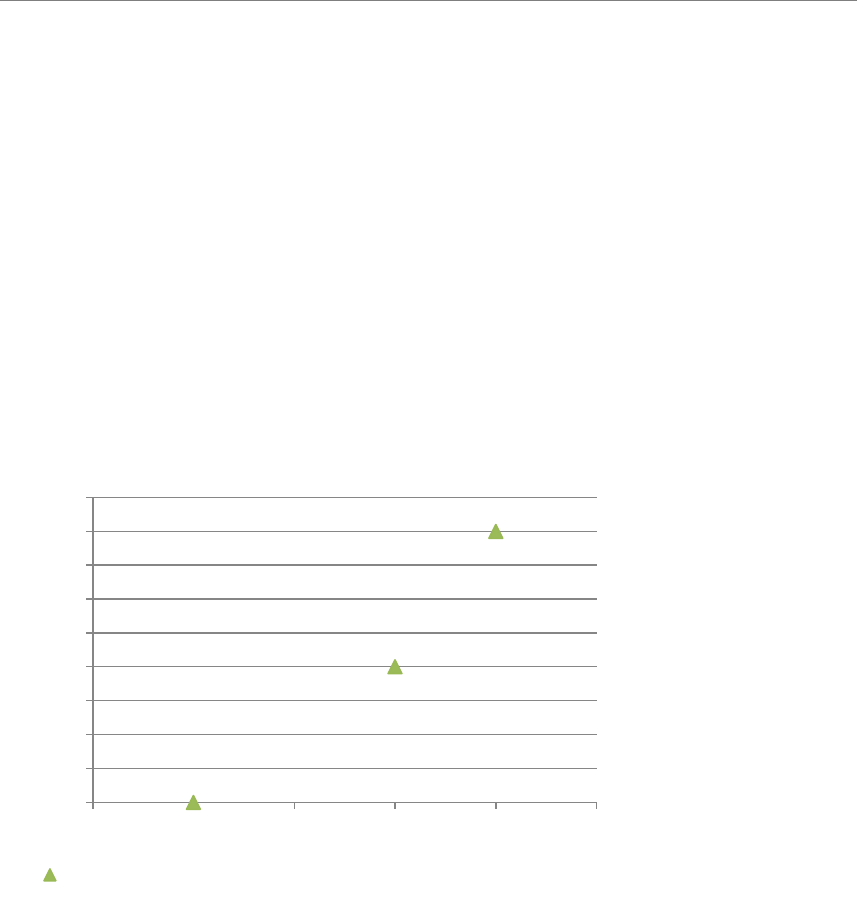
European Added Value Assessment
PE 615.635 160
to represent the impact of different liability regimes on the roll-out and take-up of connected and
autonomous vehicles. The change in benefits relative to the baseline is then quantified for each
scenario.
The baseline forecast demand for FAVs was presented in the interviews discussed in Chapter 2
(shown in Figure 5). The selection was somewhat arbitrary but was largely based on a scenario
developed by the Boston Consulting Group (BCG), which assumes that some governments would
pass regulations on FAVs after about eight years. The BCG forecast was considered an
appropriate starting point for assessing the effects of wider European legislation on FAV
deployment. Moreover, most of the interviewees felt that the BCG predictions were as good as
any other as a starting point.
Figure 5 – Baseline market penetration rates for FAVS
Source: Own calculation, presented in Appendix B, based on Exhibit 11, BCG (2015)
0
5
10
15
20
25
30
35
40
45
2020 2025 2030 2035 2040 2045
Market penetration by FAVs (%)
year
Option 1 Baseline (based on Boston Consulting Group forecasts 2015)

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 161
In addition to the demand, the baseline scenario (S0) requires a large amount of data and
assumptions relating to the relevant transport markets and wider economy. Full details of these
are provided in Appendix B. The assumptions that are particularly relevant for the analysis are:
The FAV forecast reflects the percentage of new car sales that are FAVs. This is converted
into the percentage of FAVs in the total fleet, using a simplified stock model. A fixed
annual mileage per vehicle type is then assumed to determine vehicle-kilometres
travelled (VKT), the unit of demand in the model. Additionally there is some assumed
new (induced) demand.
391
Forecasts of demand for car, bus, rail, cycling and walking
392
are exogenous and include
future expected changes (see Capros et al. 2013). An adjustment is made to allow for
assumed modal shift from these to FAVs, if the out-of-pocket or time costs of travel are
reduced (and switches from FAVs to other modes in the opposite case).
The costs for travelling in FAVs (per VKT) in the model are based on those currently
available in the literature
393
, adjusted for income, growth and inflation. Unless otherwise
specified, values for FAVs are assumed to be the same as for private cars.
The purchase price for FAVs is initially higher than an equivalent standard car.
394
The time costs of travelling, measured considering the value of time (VOT), for FAV users
is assumed to be half (50%) that for normal car users, on the basis that driving will become
a less onerous task and drivers will be able to participate in other activities; also it is
assumed that FAVs drive more efficiently. We also assume that the effective capacity of
the road infrastructure increases with the proportion of FAVs, allowing more throughput
on roads and reducing congestion.
Insurance costs are assumed to depend on accident risk. Accident risk has been declining
and it is assumed it will be half its 2010 value by 2025, due to increasing levels of
automation more generally. FAVs are assumed to be 50% less risky than 'normal' cars. A
fixed proportion of total accident costs are covered by insurance premiums. In the
baseline we assume this proportion is the same for FAVs and 'normal' cars, and we test
the impact of different assumptions in scenario tests.
We assume that 10% of FAVs are shared vehicles and shared vehicles cover five times
more distance than privately owned vehicles. It is assumed that no 'normal' cars are
shared.
We assume that FAVs cause less air pollution (local and greenhouse gas (GHG)
emissions) because they are driven more efficiently. This is reflected in a 25% reduction
in the pollution costs per VKT of FAVs compared with 'normal' cars.
We consider the following scenarios:
395
S1: Earlier Deployment, deployment of FAVs takes place at the same rate as in the
baseline but deployment starts five years earlier.
391
A fixed parameter is used but it reflects changes in generalised price and effective capacity expected,
based on elasticities.
392
Cycling and walking are taken together as a slow mode.
393
Mainly EU Handbook of External Costs, DfT WebTAG, TREMOVE.
394
Based on BCG analysis.
395
Only the parameters discussed for each of the scenarios are changed in that scenario; all other parameters
remain unchanged from their baseline values.

European Added Value Assessment
PE 615.635 162
S2 Slower Deployment Rate, deployment of FAVs starts at the same time as the baseline
forecast but occurs at a slower rate, so that in 2035 and 2040, new car market penetration
is half that of the baseline.
S3: No Insurance Costs, no insurance is required for FAV users. (This corresponds
approximately to Option 3 from Chapter 2.)
S4: Fully Internalised Costs, all accident costs for FAVs are fully internalised in the
insurance market and this is reflected in the insurance premium to consumers. (This
corresponds approximately to Option 4 from Chapter 2.)
S5: Lower Productivity, the VOT for FAV users is 50% higher than assumed in the
baseline, reflecting lower levels of productivity in FAVs.
S6: Higher Accident Rate, the accident rate for all vehicles has reduced more slowly and
is 50% higher than assumed in the baseline by 2025.
S7: Increased FAV safety, FAVs are safer than assumed in the baseline and reduce the
accident risk by 90% (baseline 50%).
S8: 50% of FAVs are shared, compared with 10% in the baseline. Shared vehicles cover
five times more vehicle-kilometres than privately owned vehicles.
Scenarios S1 to S4 explore impacts that could be influenced by the liability and insurance regimes
that could be in place across Europe. Scenarios S5 to S8 provide sensitivity analysis. They examine
the importance of other factors, not related to insurance or liability but which could affect the
magnitude of the benefits attributed to the roll-out of FAVs in any setting. The baseline roll-out
into the new vehicle fleet differs from the baseline (shown in Figure 1) in scenarios S1 and S2
only. In the remaining scenarios, the baseline roll-out is unchanged but there may different modal
shift and induced demand responses resulting from changes in other parameters.
Sensitivity analysis is an important aspect of this study, to which our approach is well suited.
Given the uncertainty associated in making an assessment of the impact of technology yet to be
deployed, under legislative regimes yet to be enacted or tested, it is important to establish how
sensitive the various impacts included in the CBA are to the parameters used to calculate them.
2.1 Assessing the impacts
The transport markets we are primarily interested in are private cars in terms of vehicle
kilometres travelled (VKT), by users in the EU. The introduction of FAVs into this market could
have a number of impacts, which we incorporate in the CBA. These are summarised in the
following table and discussed in further detail below.
Table 15 – Summary of impacts by stakeholder group included in the CBA
Stakeholder group
Impacts
Travellers
Travel times may decrease because FAVs may be able to make
more efficient use of road space. This could be countered by more
people travelling by FAVs. Moreover, because people can be
more productive while travelling, the perceived cost of travelling
time in a FAV will be less.
396
396
By generalised cost we mean the monetary costs associated with a journey (fuel, vehicle ownership and
maintenance) as well as time costs, monetised using the value of time.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 163
There will be changes in the costs of travelling by FAVs, because
the costs of insurance and ownership will change. Moreover,
FAVs may be driven more efficiently, which will reduce the per
kilometre cost of travelling. Reductions in out-of-pocket costs
may have a secondary impact on the amount of travel.
There may be health costs of increased travel by FAVs if people
switch from modes which incorporate higher levels of walking.
Population more
widely
If FAVs have fewer accidents, there will be lower numbers of
injuries and deaths due to road accidents.
If FAVs drive more efficiently, there will be fewer greenhouse gas
emissions and air pollution.
Transport service
providers/operators
If FAVs are more attractive compared to other modes of travel,
for example public transport services, people may switch more
journeys to FAVs, resulting in lower revenues from public
transport services.
Producers on other
markets (vehicle,
insurance,
components)
Vehicle producers, other component providers, vehicle repair
services and insurers may see changes to revenues and costs as a
result of the introduction of FAVs.
Rest of economy
(Wider impacts)
Improvements in transport efficiency facilitated by take-up of
FAVs will lead to wider economic impacts. These take account of
agglomeration effects, labour market inefficiencies and product
differentiation.
EU (MS governments
and EU institutions)
The introduction of FAVs may lead to lower tax revenues for
governments from insurance.
These impacts are quantified for all the options and can be negative or positive in value. We are
only interested in how these effects differ from the baseline. Quantifying these provides a
quantitative measure of the added value of faster roll-out and take-up of connected and
autonomous vehicles and, additionally, of the impact of different insurance regimes. All of these
impacts are counted as user and producer benefits in CBA terminology.
The above analysis relies on some additional assumptions. We assume that the proportion of FAV
vehicle technology types will not be significantly different from the existing fleet. In particular,
given the uncertainty in the data pertaining to FAVs, we do not include any impacts from the
introduction of FAVs that would arise from them being electric; for example on noise, the
environment (tailpipe emissions) or infrastructure wear and tear. If the use of electric vehicles is
encouraged as a result of FAVs, this could add substantially to the benefits. We have also
excluded freight from our analysis. Here, the impact of platooning is clearly important. However,
given the difficulty of quantifying the demand for freight FAVs and the effect of liability and
insurance regimes on this sector, we have focused on passenger transport.
There are, in addition, a number of potential impacts on other markets that we return to in the
next section:
Manufacturers (producers) of standard cars, trucks and lorries may lose new car sales to
FAVs. Over time second-hand sales may be affected.
Component suppliers may provide more components to FAVs than they do to normal
vehicles.

European Added Value Assessment
PE 615.635 164
Changes in accident risk may affect revenues in the insurance industry.
However, we do not account for the following.
Independent suppliers in aftersales markets may be impacted as repairs and spares may
be tied to producer-preferred suppliers.
Impact of liability regimes on costs of manufacturers and the insurance industry.
Impact of direct changes to labour market for private cars, noting that implications for
structural unemployment are beyond the scope of this study.
The costs that are of interest for this study are those to the EU of implementing liability legislation
and those arising to consumers and business for compliance with legislation and litigation.
Detailed calculation of additional administrative costs to the EU (and MS) of drawing up and
enforcing legislation for the different scenarios is beyond the scope of this study
397
. Moreover,
given the findings in subsequent sections that the benefits are relatively small for legislative
amendments, there is less reason to quantify the costs of making such amendments.
The costs arising to consumers and business from compliance with legislation are accounted for,
not on the cost side, but with the benefits to these groups. Compliance costs, including both
administrative costs and changes in liability costs, should be reflected in the impact on the
deployment of FAVs. However, our interview findings indicated that the different liability
regimes would not significantly affect roll-out. One explanation for this is that, for producers,
these compliance costs would be negligible compared to other costs associated with FAVs. In
this analysis, we make a number of simplifying assumptions as to how costs are transferred
between consumers, producers and insurers when the liability regime differs from the baseline.
Firstly, for the scenario (S3) where there are no insurance costs for the FAV user, the existing
producer insurance is considered sufficient to cover any liability arising under the PLD.
Secondly, when the accident costs from FAVs are fully covered, these costs are passed on to the
consumers either directly in their motor insurance or in the purchase price, if the producer takes
on the liability.
398
We assume there are no additional transaction costs to the insurance industry
for insuring FAVs, either through producer insurance (S3) or motor insurance for users (S4).
399
Finally, for all other scenarios, the same insurance rules are assumed to apply to both 'normal'
cars and FAVs. These assumptions allow us to isolate the impact of the parameter of interest in
a particular scenario.
As for litigation costs, it is unclear what the impact of FAVs will be. If the litigation rate per
accident remains constant, total litigation costs will indeed follow the accident rate downwards.
Initially, however, the litigation rate might rise as parties seek to clarify any uncertain aspects of
the law. In the longer term the litigation rate per accident might even fall below pre-FAV levels
397
The costs and benefits of EU regulation are discussed in Renda et al. (2013). The costs of implementation
and compliance have also been the subject of detailed studies in other areas, such as environment and data
protection. See for example London Economics (2015), Farmer et al. (2013).
398
In the case where EU law has been harmonised in favour of accident victims (Option 4, Chapter 2), costs
may be passed on to the user either directly through motor insurance or indirectly by producers through
the purchase price. Alternatively, producers may choose to absorb the costs, as at least one producer has
signalled they would under certain conditions. In our analysis, to avoid ambiguity, we assume that costs are
passed on but discuss the implications of this.
399
Or these are not passed on to the consumer.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 165
because the number of potential parties might fall – instead of every driver being a potential
defendant, only service providers and manufacturers will come into that category and so it will
become easier to systematise the treatment of claims.
An alleged advantage of strict liability (brought about through a move to the PLD) over fault is
that it tends to reduce process costs and thus overall transaction costs. The argument is that fault
requires victims to establish precisely who did what – in the case of a FAV, for example, who
made which mistake in producing the software or the hardware of the vehicle – whereas in strict
liability the victim has no need to discover these details. It is not clear, however, that this amounts
to a very big advantage. Even in strict liability the victim has to prove causation, which is not
necessarily cheap to establish. In addition, the claims-processing industry in fault-based
jurisdictions has been able to standardise claims and so benefit from economies of scale.
Finally, we assume that the costs associated with providing the infrastructure for FAV
deployment to EU MS will not differ between the baseline and other scenarios.
There are a number of outcome measures that are commonly used in CBA: Benefit Cost Ratio
(BCR), Net Present Value (NPV) and Internal Rate of Return (IRR). The choice of measure
depends to a large extent on the type of project to be assessed.
For this study, the analysis period is 2025-2040. Most studies do not predict much deployment of
FAVs before 2025.
400
The chosen period balances the need to measure the impact of FAV
deployment against increasing uncertainty of future predictions. We expect that the main effect
of the different options will be to change the rate of market penetration by FAVs. For each option,
the benefits for each year relative to the baseline are calculated (noting that these may be
negative). As we also expect that the legislative costs to the EU of the different options will be
small (and possibly not even quantifiable) relative to the benefits, the NPV is the preferred
measure as this uses differences rather than ratios.
The NPV is defined as the sum of the difference between the benefits (Bt) and costs (Ct) over
each year (t) of the analysis period (n), discounted to today's value, such that
t
0
(1 )
n
tt
BC
NPV
r
, where r is the discount rate
DG-Regio (2014), recommends a discount rate of 4%.
Findings from the cost-benefit analysis
In this section we present the results of the CBA for the eight scenarios. The monetised impacts
represent the value of the differences in each scenario relative to the baseline.
400
KPMG (2015), Jiang et al (2015): Self-Driving Cars: Disruptive or Incremental? Applied Innovation
Review.

European Added Value Assessment
PE 615.635 166
The demand for FAVs as a proportion of all new cars and the total car fleet is presented in Table
16. While the proportion of new car sales that are FAV may be relatively high in the baseline, it
takes some time for this to work its way into the fleet as a whole. There are marked changes in
demand for FAVs in S1 and S2, as expected. Small changes also occur in the other scenarios due
to assumptions regarding induced demand and modal shift as prices change.
Table 16 – Proportion of new cars and all cars that are FAVs, by scenario (%)
Year
2025
2030
2035
2040
New cars (%)
Baseline
0.0
6.4
19.6
39.8
All cars (%)
Baseline
0.0
1.4
5.3
12.8
S1 – Earlier Deployment
1.4
5.3
12.8
23.7
S2 – Slower Deployment Rate
0.0
0.9
2.8
6.7
S3 – No Insurance Costs
0.0
1.4
5.4
12.9
S4 – Fully Internalised Costs
0.0
1.4
5.3
12.8
S5 – Lower Productivity
1.4
1.3
5.1
12.5
S6 – Higher Accident Rate
0.0
1.4
5.3
12.8
S7 – Increased FAV Safety
0.0
1.4
5.4
12.9
S8 – 50% Shared FAVs
0.0
1.7
5.8
13.6
The results of the CBA for each scenario are presented in Table 17.
The main benefit of increased deployment of FAVs is through a reduction in the generalised costs
of transport for FAV users due to increased productivity (lower VOT) and more efficient driving.
More efficient driving also benefits normal car users through reduced congestion costs and leads
to reduced environmental impacts. The calculation of wider economic impacts from
agglomeration benefits is also a result of reductions in congestion. Tax revenues are reduced
because there is less tax from lower insurance premiums and, since 10% of FAVs are shared, fewer
vehicles are needed to supply demand, although this is offset by reduced subsidies for public
transport operators. In our analysis, health impacts are negatively affected by increased demand
for FAVs, as a result of a modal shift away from active modes (cycling and walking, including as
part of public transport use). Bringing forward deployment of FAVs has a larger impact than
changing the rate of deployment as more benefits accrue over the analysis period. However, the
impacts of both are relatively small. To put the magnitude of these effects in context, the increase
in benefits of approximately €150bn from earlier deployment of FAVs represents less than 0.1%
of European GDP over the same period. The turnover of the EU automotive industry represents
about 6.5% of GDP. This suggests that a regulatory regime that slows or speeds up the rate of
deployment of FAVs does not significantly change the benefits arising from FAV technology,
which may themselves be large
401
.
Reducing the liability of FAVs for accidents for users (S3) appears to have an overall positive
impact. Lower insurance reduces the cost of travel, leading to positive transport user impacts.
These outweigh the additional burden to society of accident costs involving FAVs, which are no
longer covered by insurance. These are small as FAVs have a lower accident risk than other
401
It is important to emphasise that these scenarios are intended to show how different liability regimes
might affect the roll-out of FAVs, given that this technology is expected to be introduced anyway. The
benefits of introducing AV technology relative to not doing so is a different comparion. Based on our own
indicative NPV calculations using data from KPMG, 2015, the benefits in this case would be of the order of
2% of GDP over the period 2015-2030.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 167
vehicles. On the other hand, making FAV users fully liable has a negative impact (S3). In this case
where the additional liability costs are fully internalised and passed on to drivers
402
, there is a
reduction in transport user benefits, because of the increase in travel costs and this more than
offsets the benefit in terms of external accident cost impacts.
However, both these effects are small relative to the benefits of earlier or faster deployment.
It is noteworthy that the analysis is more sensitive to changes in parameters unrelated to
insurance and liability as it relates to FAVs. While reducing the accident risk of FAVs to 10% of
that for normal cars clearly provides societal benefits, these will not be significant until a sufficient
level of deployment is reached. However, if FAV users are assumed to value travel time
differently than forecast, or if accident rates for all vehicles change because of improvements in
non-FAV technology in the fleet, they will have a significant impact on the calculated benefits.
Similarly, assumptions on vehicle sharing are important because they impact user costs. In our
analysis we have restricted this business model to FAVs; shared normal cars could increase user
benefits further.
In the above results we focus on the impacts from the passenger transport market. There are, in
addition, a number of potential impacts on other markets. Manufacturers (producers) of
standard cars may lose new car sales to those selling FAVs (of course, the same suppliers may
sell both standard vehicles and FAVs). Over time, second hand sales may be affected. Compliance
with new legislation may also have an impact on manufacturer's costs. The standard assumption
is that, in the long run, FAV and standard car manufacturers will operate in perfectly competitive
markets and price at marginal cost. Revenues across the industry are then mainly affected by the
sharing model, assumed for FAVs in our analysis, as fewer vehicles are needed to supply the
expected travel demand. For example, we estimate a decrease in revenues of around €90bn if
FAVs are introduced more quickly than in the baseline. However, if components in FAVs
constitute a larger proportion of the vehicle value than for other vehicles
403
, suppliers may
generate additional profits. Independent suppliers in aftersales markets, on the other hand, may
be negatively impacted as repairs and spares may be tied to producer-preferred suppliers. We
have neither explored nor quantified these effects.
In terms of the impact on the insurance industry, we have only included the impact of changes
in insurance premiums in the transport market, assuming that there are no additional transaction
costs associated with a change in liability regime. We have assumed that the pricing model for
the insurance industry covers the accident costs internalised by each mode. Revenues are
expected to decrease with the introduction of FAVs as they have a lower accident risk. However,
insurance industry revenues are likely to be most affected by a reduced risk of accidents in the
overall car fleet, which could result from the continued introduction of technology into non-
automated vehicles, as well as other road safety measures. Finally, we do not consider the impact
of direct changes to the labour market for private cars, noting that implications for structural
unemployment are beyond the scope of this study.
402
As noted earlier, we assume that the liability is passed to users either directly through motor insurance
or, if producers are liable, indirectly through the purchase price. If producers do not pass on the accident
costs, then the loss of benefits will accrue to producer and not consumer. In general this will not be a direct
transfer as more consumers will continue to travel at the lower cost.
403
Estimated in one study to increase from 33.3 to 40 % of vehicle value (KPMG, 2015)

European Added Value Assessment
PE 615.635 168
1.1 What the CBA means for legislative policy
Our analysis indicates that the relative benefits of earlier (5 years earlier) or changing the rate of
deployment leads to relatively small societal benefits, relative to the baseline. Further, impacts as
a result of differing assumptions regarding insurance costs, specifically whether no insurance
would be required for FAV users or whether the liability insurance costs would be passed on
directly from manufacturers or supplier to users, are also small.
The analysis is sensitive to assumptions regarding traveller productivity and assumptions
regarding sharing of vehicles, with higher levels of productivity and sharing leading to higher
societal benefits.

Table 17 – Summary CBA impacts of scenarios for the EU (€bn in 2015 prices)
Insurance / Liability Scenarios
Sensitivity Tests
Consumer Impacts
(€bn in 2015 prices)
S1:Earlier
Deployment
S2:Slower
Deployment
Rate
S3:No
Insurance
Costs
S4:Fully
Internalised
Costs
S5:Lower
Productivity
S6:Higher
Accident
Rate
S7:
Increased
FAV safety
S8:50%
shared FAVs
Transport user impacts
116.53
-35.58
35.22
-23.95
-188.14
-879.04
17.18
315.29
Health impacts
-1.99
0.00
-0.59
0.19
2.09
0.03
-0.36
-4.21
External accident cost
impacts
2.34
-0.81
-22.12
6.92
0.05
-49.24
1.27
-0.10
External environmental
cost impacts
8.60
-3.01
-0.20
0.06
0.71
-0.03
-0.12
-1.44
Tax revenue
6.57
0.82
-4.96
1.55
-2.67
130.85
-2.97
-26.81
Wider economic
impacts
16.11
-5.55
0.75
-0.24
-226.30
-15.41
0.45
5.43
Total
148.15
-44.13
8.10
-15.47
-414.27
-812.85
15.46
288.17
1 All the impacts above are positive if they represent a benefit and negative if they represent a disbenefit relative to the baseline.
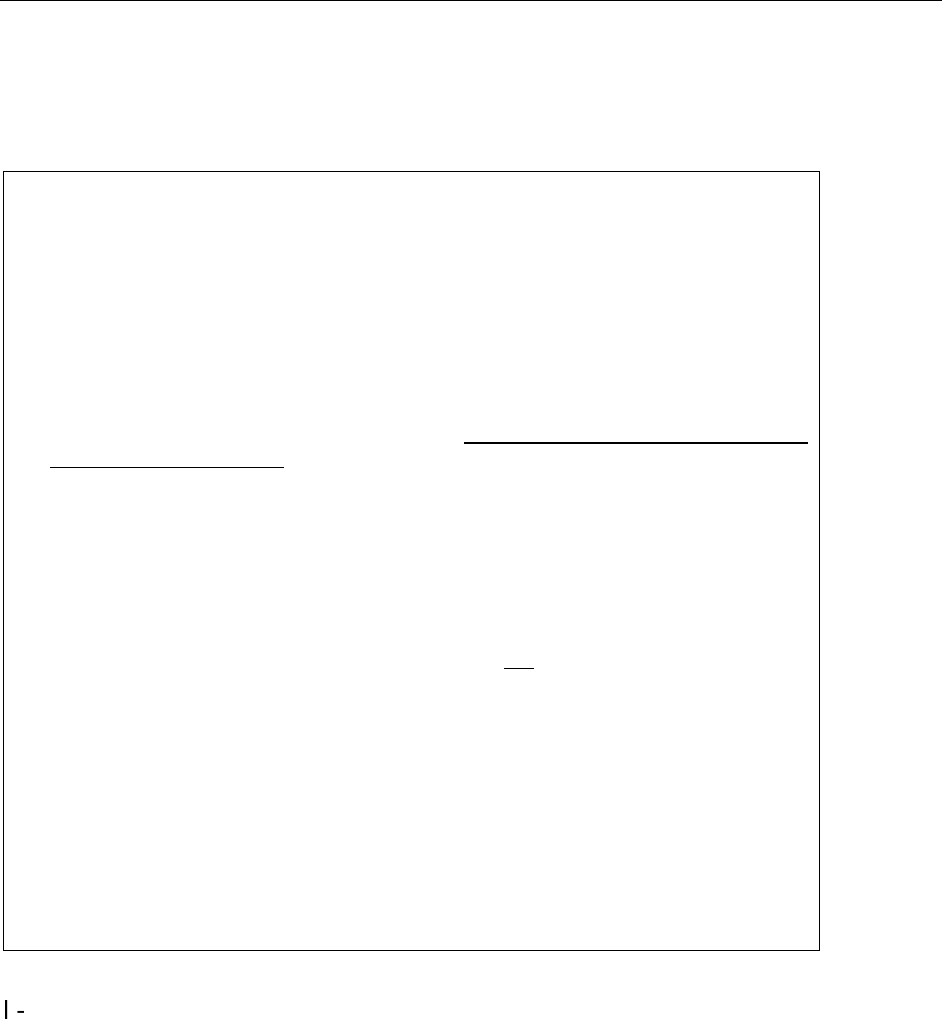
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 171
Chapter 4 Assessing the legislative policy options
Chapter summary and key findings
Research activities: Qualitative assessment of policy options set out in Chapter 1, taking
account of stakeholder needs, social and economic benefits and EU value-added.
Key findings:
Product liability legislation is of critical importance for producers when considering
whether to bring new technologies to market, but pre-emptive legislation of the PLD
is not required at this time.
o While stakeholders felt that harmonisation of liability laws across Member
States was preferable, divergence would not have a substantial impact on roll-
out of autonomous and connected vehicles.
o Moreover, the societal benefits of earlier (5 years earlier) or faster deployment
are relatively small.
But the PLD needs to work alongside other Member State regimes to ensure timely
compensation for road accident victims.
However, legislation might be required in areas of use of connected and autonomous
vehicles, e.g. whether young children can travel independently in these vehicles; and
clarification of interpretation of specific issues, e.g. whether the concept of 'driver' in
the Vienna Convention could encompass autonomous driving, or whether individuals
could be charged with criminal negligence if in an accident in an autonomous vehicle
they were not driving.
There will also be new risks, such as cyberattacks, hacking, etc., which will need to be
taken into account in assessment of liability.
Finally interventions may be required: (i) to ensure access to accident and driving data
to enable accurate and timely liability judgements, including in areas such as setting
of data standards, sharing, and storage, as well as in terms of data privacy and
protection; and (ii) to set vehicle standards.
Analysis of policy options
In this chapter we provide a qualitative summary of the assessment of the four legislative policy
options:
Option 1 (Baseline): The law as it is, with no adaptations for FAVs.
Option 2 (Divergence): The law at EU level as it is but with significant new variations
introduced by Member States.
Option 3 (Pro-industry harmonisation): EU legislation to pre-empt variation by Member
States, with the changes favouring the producers and suppliers of autonomous vehicles.
Option 4 (Pro-victim harmonisation): EU legislation to pre-empt variation by Member
States, with the changes favouring road accident victims.

European Added Value Assessment
PE 615.635 172
As noted in Chapter 1, the options have been specified in a relatively straightforward manner to
allow discussion within an interview context, across a range of stakeholders. They have also
been purposefully defined to reflect legislative extremes to give us the opportunity to identify
impacts.
For each policy option, we consider the impact on stakeholders (discussed in detail in Chapter
1), the economic impact (from the CBA, discussed in Chapter 2), as well as further evaluation
criteria relevant to EU legislative policy, specifically how the policy:
Provides added value to the EU in terms of effectiveness, efficiency, and synergy.
Contributes to stakeholders' needs (utility and simplification) and supplements other
national or international policies (complementarity).
Contributes to the coherence of the current framework regulating liability and insurance
related to motor vehicles.
The European Commission Staff Working Document (SEC (2011) 867 final) recommended that
the EU Added Value Test is performed on the basis of three criteria, as summarised in the box
below.
A common approach on liability and insurance related to connected and autonomous vehicles
might arguably have such effects in the following ways:
Effectiveness: harmonisation of liability laws across Member States may streamline and
bring forward the roll-out of AVs across Member States, as well as reduce confusion over
which laws apply for cross-border travel.
Efficiency: coordination of liability laws reduces legislative requirements for Member
States.
Synergy: consistency of liability laws may raise standards and stimulate take-up of AVs
across all Member States, reducing potential disparities.
As part of the qualitative interviews with stakeholders, questions were included to explore the
impacts on effectiveness, efficiency and synergy of different policy options, if the policy impacted
roll-out or take-up of FAVs. However, in nearly all of the interviews the respondents felt that the
policy options would not impact roll-out, so the subsequent questions were irrelevant.
BOX 1: EU VALUE ADDED TEST CRITERIA (SOURCE: EUROPEAN
COMMISSION STAFF WORKING DOCUMENT (SEC (2011) 867 FINAL)
Effectiveness: where EU action is the only way to get results to create missing links,
avoid fragmentation, and realise the potential of a border-free Europe.
Efficiency: where the EU offers better value for money, because externalities can be
addressed and resources or expertise can be pooled, an action can be better coordinated.
Synergy: where EU action is necessary to complement, stimulate, and leverage action to
reduce disparities, raise standards, and create synergies.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 173
Similarly, questions were included in the interview protocol to explore the utility and
simplification of the different legislative policy options in terms of stakeholders' needs. It was
clear that the baseline scenario offered the best option to users, and that users felt that it was 'good
enough as it is'. Other policy options were not seen to offer utility or simplification of the already
good-enough PLD, at this time. Indeed, respondents feared that early attempts at legislation,
albeit well-intentioned, could easily have unexpected and undesired deleterious effects.
The same is generally true for complementarity. The existing regimes on product liability and
insurance provide beneficial complementarity to national liability regimes. The degree of benefit
will rise automatically as the basis of liability for road traffic accidents shifts towards product
liability. Some adjustment of the insurance regime might, however, be desirable to ensure that
product liability is included as a form of liability relevant to road traffic accidents.
The position on coherence is similar. As the technology is rolled out, product liability will become
more important as the source of liability for road traffic accidents. Since product liability is
already a harmonised field (albeit in some respects imperfectly) we can expect an automatic
increase in coherence of policy across Member States. Our assessment of our respondents,
however, is that no need exists to attempt to create further coherence by legislative action at this
time, at least not on the basis that further moves in the direction of harmonisation would
encourage earlier deployment. In particular, although Option 2 might be seen as causing a loss
of coherence, we have not found reasons, beyond creating coherence for coherence's sake, for
taking counter-measures against it.
The impacts for each policy option are summarised in Table 18.
Table 18 – Assessment of legislative policy options
Policy options
Option 1: The
law as it is with
no adaptions
for FAVs
(Baseline =
PLD as now)
Option 2: The
law at EU level as
it is, but with
significant new
variations
introduced by
Member States
Option 3: EU
legislation to
pre-empt
variation by MS,
with changes
favouring
producers and
suppliers of
FAVs
Option 4: EU
legislation to
pre-empt
variation by MS,
with changes
favouring road
accident victims
Stakeholders'
needs
(Manufacturers,
Insurers,
Connected
industries,
Service
providers,
Consumer
agencies)
Strongly
preferred
option 'The
PLD is good
enough as it is'.
Generally,
harmonisation of
laws is preferred;
a small number
felt that
divergence and
experimentation
would be
beneficial, but
overall impact
would be small.
Pre-emptive
amendments not
required, but if
amendments are
made they need
to ensure fair
treatment of
producers and
victims.
Pre-emptive
amendments not
required, but if
amendments are
made they need
to ensure fair
treatment of
producers and
victims.
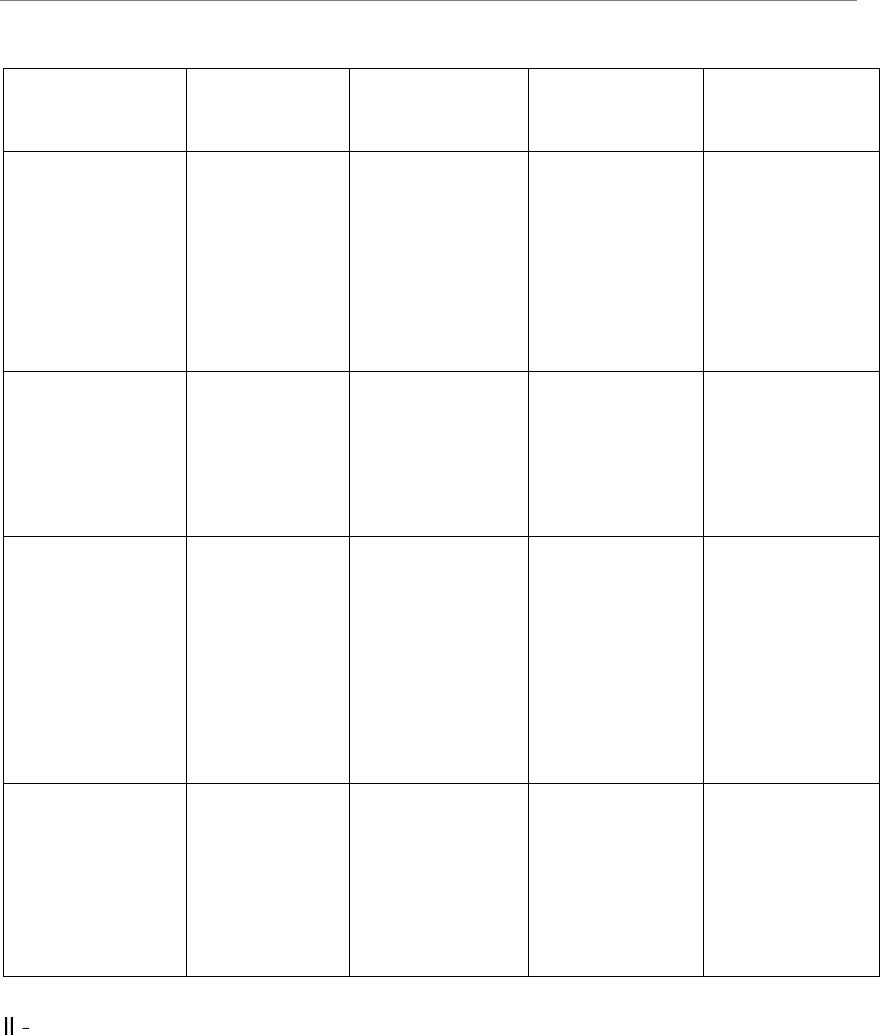
European Added Value Assessment
PE 615.635 174
Economic impact
(from CBA)
Baseline for
assessment.
Small impact,
could be positive
or negative.
Small impact,
could be positive
or negative.
Small impact,
could be positive
or negative.
Added value in
terms of
effectiveness,
efficiency and
synergy for EU
Member States
Baseline for
assessment.
Impact likely to
be negative in
terms of
effectiveness,
efficiency and
synergy, but
overall impact is
small.
Small/negligible
impact on
effectiveness,
efficiency and
synergy.
Small/negligible
impact on
effectiveness,
efficiency and
synergy.
Utility and
simplification for
stakeholders
Baseline is
preferred.
No discernible
benefit from
baseline in terms
of utility and
simplification to
users.
No discernible
benefit from
baseline in terms
of utility and
simplification to
users.
No discernible
benefit from
baseline in terms
of utility and
simplification to
users.
Complementarity
Baseline is seen
to work well by
stakeholders.
Inclusion of
product
liability in
insurance
regime might
be desirable.
Complementarity
of the PLD would
still exist.
Would increase
complementarity
but legislative
action not seen as
required at this
stage.
Would increase
complementarity
but legislative
action not seen as
required at this
stage.
Coherence
Will increase
automatically
with
deployment.
No further
action
necessary.
Would result in
some loss of
coherence but
preventive action
not regarded as
necessary at this
time.
Would result in
an increase in
coherence but
not regarded as
necessary at this
time.
Would result in
an increase in
coherence but
not regarded as
necessary at this
time.
Recommendations
The conclusion from the qualitative analysis is that, while product liability legislation is seen to
be of critical importance for producers when considering whether to bring new technologies to
market, pre-emptive legislation of the PLD is not seen to provide benefits in terms of roll-out and
take-up of FAVS, and is not required at this time.
While there was preference for harmonisation, or minimisation of variation, of national liability
laws, by manufacturers, insurers and those in connected industries, it was felt that such
harmonisation would not have a manifest impact on the roll-out of connected and autonomous
vehicles, given the substantial market pressure to roll out these vehicles. Moreover,
manufacturers will be planning to roll out FAVS in a number of countries, inside and outside the
EU, with differing liability laws.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 175
Moreover, the quantitative analysis indicates that even if amendments to the PLD were able to
bring forward or speed up roll-out of FAVs, given the size of likely impacts the social and
economic benefits to society are relatively small (noting that the quantitative analysis is sensitive
to assumptions regarding traveller productivity and sharing of vehicles, with higher levels of
productivity and sharing leading to higher societal benefits). It is noteworthy that the quantitative
analysis uses quite optimistic values for traveller productivity and even with higher levels of
vehicle sharing the societal benefits are still relatively small.
The qualitative research with stakeholders found that most felt that the existing legislation was
appropriate for connected and autonomous vehicles, particularly if existing legislation and
international treaties were interpreted in an open-minded way. Further, many felt that it was
simply too early in the innovation process and that it was important to learn what may happen
before introducing new legislation that could be detrimental to roll-out and use of these vehicles.
There was also a view that it was not feasible to foresee and legislate for every possible outcome,
and that we should not be afraid of the judicial process to determine benchmarks.
Thus, we recommend no amendment to the PLD at this time.
However, there was near unanimous agreement of the need for the PLD to work alongside other
Member State regimes to ensure timely compensation for road accident victims.
Moreover, there are areas that could require legislation, particularly with regards to the use of
connected and autonomous vehicles, for example whether young children could travel
independently in these vehicles, as well as clarification of interpretation of specific issues, for
example whether the concept of 'a driver' in the Vienna Convention could encompass
autonomous driving, or whether individuals could be charged with criminal negligence if in an
accident in an autonomous vehicle they were not driving.
There will also be new risks, such as cyberattacks, hacking, etc., which will need to be taken into
account in assessment of liability.
Interviewees noted a number of areas where intervention would be useful to improve the
effectiveness of connected and fully autonomous vehicles. The first of these, mentioned by nearly
all interviewees, was in terms of access to accident and driving data to enable accurate and timely
liability judgements, including such areas as data standards, sharing, and storage, as well as in
terms of data privacy and protection. Such access may be required by manufacturers, insurers,
public authorities and travellers themselves. The second was in the area of setting of vehicle
standards more generally.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 177
References
Anderson, James M., Nidhi Kalra, Karlyn D. Stanley, Paul Sorensen, Constantine Samaras
and Oluwatobi A. Oluwatola. 2016. Autonomous Vehicle Technology: A Guide for
Policymakers. RAND Corporation. RR-443-2. As of 30 March 2017:
http://www.rand.org/pubs/research_reports/RR443-2.html
CEPS. 2013. Assessing the Costs and Benefits of Regulation. European Commission.
Department for Transport. 2015. The Pathway to Driverless Cars: Summary Report and
Action Plan. As of 30 March 2017:
https://www.gov.uk/government/uploads/system/uploads/attachment_data/file/40
1562/pathway-driverless-cars-summary.pdf
DG-Regio. 2014. Guide to Cost-Benefit Analysis of Investment Projects. European
Commission.
European Commission. 2016. GEAR 2030, Discussion Paper, Roadmap on Highly
Automated Vehicles. As of 30 March 2017:
https://circabc.europa.eu/sd/a/a68ddba0-996e-4795-b207-
8da58b4ca83e/Discussion%20Paper%C2%A0-
%20Roadmap%20on%20Highly%20Automated%20Vehicles%2008-01-2016.pdf
HM Treasury. 2011. The Green book – Appraisal and Evaluation in Central Government.
London. TSO.
Jiang T., S. Petrovic, U. Ayyer, A. Tolani and S. Husain. 2015. Self-driving Cars: Disruptive
or Incremental? Applied Innovation Review, Issue 1. As of 30 March 2017:
http://cet.berkeley.edu/wp-content/uploads/Self-Driving-Cars.pdf
KPMG. 2015. Connected and Autonomous Vehicles – the UK Economic Opportunity. As
of 30 March 2017:
https://www.smmt.co.uk/2015/03/connected-and-autonomous-vehicles-the-uk-
economic--opportunity/
NHTSA. 2013. 'U.S. Department of Transportation Releases Policy on Automated Vehicle
Development.' 30 May. As of 30 March 2017:
https://www.transportation.gov/briefing-room/us-department-transportation-releases-
policy-automated-vehicle-development
OECD. 2011. Improving the Practice of Transport Project Appraisal, ITF Round Tables, No.
149.
Smith, Bryant Walker and Joakim Svennson. 2015. Automated and Autonomous Driving,
Regulation under Uncertainty, International Transport Forum, OECD. As of 30 March
2017:
https://merritt.cdlib.org/d/ark:%252F13030%252Fm5gq948m/1/producer%252F911152
502.pdf
Ricardo-AEA. 2014. Update of the Handbook on External Costs of Transport. European
Commission.
SAE—See Society of Automobile Engineers.
Society of Automobile Engineers, On-Road Automated Vehicle Standards Committee,
Information Report J3016: Taxonomy and Definitions, 2014.
S. Proost, F. Dunkerley, S Van der Look, N. Adler, J. Brocker, A. Korzhenevych. 2013. Do
the selected transEuropean transport investments pass the cost benefit test? Transportation
41, 107-132.

European Added Value Assessment
PE 615.635 178
University of Buckingham Business School. 2014. The Used Car Market Report 2014. A
report for BCA.
Xavier Mosquet, Thomas Dauner, Nikolaus Lang, Michael Rüßmann, Antonella Mei-
Pochtler, Rakshita Agrawal, and Florian Schmieg. 2015. Revolution in the Driver's Seat:
The Road to Autonomous Vehicles. bcg.perspectives, April 2015. As of 30 March 2017:
https://www.bcgperspectives.com/content/articles/automotive-consumer-insight-
revolution-drivers-seat-road-autonomous-vehicles/.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 179
Appendix A: Background information for interview
participants

European Added Value Assessment
PE 615.635 180
Appendix B: CBA Methodology, data and assumptions
for quantitative assessment
Summary table of inputs and assumptions for the CBA

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 181
Para
mete
r
Description
Value
Source
Notes
discount rate
(real) %
4
DG Regio (2014)
inflation rate
(annual) %
1.18
IMF forecast
Demand
p_A
V
Forecast AV
market,
penetration new
car sales (%)
Own calculation
based on BCG
scenario used for
baseline (BCG,
2015).
Changes over time.
V_C
Baseline demand
car (10
9
vkm)
Reference Scenario
for transport
demand for EU28
(Capros et al. 2013,
Appendix 2, p91).
Changes over time.
V_P
T
Baseline demand
bus (10
9
vkm)
As above.
Changes over time.
V_R
Baseline demand
rail (10
9
vkm)
As above.
Changes over time.
V_O
Baseline demand
active modes (10
9
vkm)
As above.
Changes over time.
p_NC
Proportion of car
demand (car-km)
by new cars
0.054
Based on Eurostat
data for total cars in
EU28 and ACEA
new car
registrations data.
Assumed fixed.
p_SH
Proportion of car
demand by cars
older than one
year
0.946
As above.
Assumed fixed.
p_sh
Proportion of
FAVs that are
shared
0.1 (0.5
in S8)
Assumption. See
section on
Calculation of
demand below.
Assumed fixed, except
in scenario S8.

European Added Value Assessment
PE 615.635 182
α_sh
Multiplying
factor for shared
vehicle km
5
Assumption. See
section on
Calculation of
demand below.
Shared vehicles
undertake five times
more journeys than
non-shared vehicles.
Modal shift
(cross) elasticities
0.01
(bus),
0.09
(rail)
Use values for
public transport to
car to apply to AVs
(Balcombe et al.,
2004).
Assume elasticity for
slow modes is the same
as bus.
k
Annual car
mileage (km)
12,563
Calculated from
vehicle stock and
.vehicle demand
Assume fixed all years.
See calculation of
demand below.
β
Induced FAV
demand
multiplier
0.1
Assumption. See
section on
calculation of
demand below.
Increased mileage per
FAV over the baseline to
account for access for
non-drivers and the
reduced cost of driving.
tL
Average lifetime
of cars/FAVs
8 years
Costs
Resource
TREMOVE v3.3.2,
2010 values.
404
This includes fuel and
non-fuel costs for car
travel. For rail and bus,
also includes
maintenance.
Maintenance
factor
0.5
cars,
0.8
FAVs
As above for cars.
Assumption for
FAVs.
Maintenance as a
proportion of purchase
price costs calculated for
2010 for EU as a whole
and these proportions
applied to future year
costs. FAVs are more
expensive to maintain
than cars.
Purchase
premium FAVs
Own calculation
based on cost and
market share data
from BCG, 2015.
Decreases with market
penetration until same
price as standard car
(zero premium).
404
Available from http://www.tmleuven.com/home.htm

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 183
Insurance
(eurocents/car
km)
3.88
Own calculation for
2013 based on
Insurance Europe
Market report 2015
and demand data
(Capros et al., 2013).
(A very similar value
was also derived from
TREMOVE 3.3.2 data).
This baseline value for
cars is multiplied by a
risk factor to take
account of increased
safety expectations for
both cars and FAVs in
the study period. See
section on accident costs
below.
Taxes
TREMOVE v3.3.2,
2010 values.
Taxes as a proportion of
resource and insurance
costs calculated for 2010
for EU as a whole and
these proportions
applied to future year
costs.
Value
of
time
(VOT
)
Private time
(eurocents/car
km)
WebTAG v1.4, 2010
values.
Private time costs
(euros/hour) were
weighted by trip
purpose, and converted
to costs per car km
assuming a fixed speed
per road type.
α
Travel time factor
1 (car),
0.8
(FAVs)
1.5
(bus)
Assumptions See
section on
congestion below.
This takes account of
relative average speed of
vehicles. FAVS are
assumed to drive more
efficiently than normal
cars.
Increased in-
vehicle
productivity for
FAV
0.5
Assumption.
This multiplies the VOT
to reflect increased
productivity in FAVs.
External costs
Congestion
See additional
assumptions below.
DfT, 2015.
Weighted by proportion
of (equivalent) car km on
different road types.

European Added Value Assessment
PE 615.635 184
ε_C
V
Elasticity of
effective capacity
Own calculation
based on Schladover
et al. (2012).
Reflects increase in
effective capacity as
proportion of FAVs
increase, resulting in
reductions in congestion.
Accidents
Ricardo-AEA (2014).
Weighted by proportion
of (equivalent) car km on
different road types.
Risk factor
0.5
cars,
0.25
FAVs
Based on own
calculation for cars
(see section on
accident costs
below). Assumption
for FAVs in line
with Fagnant &
Kockelman (2015)
that FAVs 50% safer
at 10% market
penetration.
Cars are 50% safer than
now at start of
calculation period and
FAVs are 50% safer than
normal cars. Both of
these assumptions are
tested in the sensitivity
scenarios (S6, S7).
Internalisation
factor
0.76
(cars/
FAVs),
0.16
(bus)
Ricardo-AEA (2014).
See section on
accident costs
below.
Internalisation of
external costs is
examined in scenarios
S3, S4.
Risk elasticity
-0.25
Ricardo-AEA (2014).
See section on
accident costs
below.
Air pollution
(local air quality)
DfT, 2015.
Air pollution
(GHG)
DfT, 2015.
Scale factor –
FAV efficiency
0.75
Assumption.
More efficient driving in
FAVs reduces emissions
by 25% cf standard cars.
Health
(euros/passenger
km)
2.18
Genter et al. (2008).
See additional
assumptions below.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 185
Wider economic
benefits
(agglomeration)
0.25
DfT, 2014. PTEG,
2015. See additional
assumptions below.
This factor multiplies
congestion costs.
Wider economic
benefits
(imperfect
competition)
0.1
DfT, 2014.
This factor multiplies
benefits derived from
business travel
(car/rail/FAV).
Additional assumptions
All values are presented for the 2015 baseline year and all calculation inputs have been
converted accordingly. Where appropriate, units have been converted using occupancy
factors from UK DfT guidance for cars, which allows for a change in car occupancy over
time, and from TREMOVE for bus and rail. In terms of road capacity, we also assume that
a bus is equivalent to two passenger cars. Prices are adjusted over the calculation period
2025 to 2040 for inflation and GDP.
405
All costs and benefits are calculated in €billion at
2015 prices.
We note that detailed calculations or collection of data at the country level were beyond
the scope of this project. It was also not part of our remit to consider methodological issues
of aggregation of country level data to form EU average values, although we acknowledge
their importance. EU aggregate level values were determined based on the data available
in the literature. Where it was not possible to obtain or determine an EU value without
detailed calculation, values were obtained from the UK DfT WebTAG guidance or other
comparable sources. These have been used as the best data sources available, and although
they cannot be considered to be representative of the EU as a whole, the majority of car-
kilometres are driven in the wealthiest EU countries which could be expected to be similar
to the UK.
406
As far as possible, the Update of the Handbook on External Costs of Transport (RICARDO-
AEA, 2014) was used to determine external costs. For congestion and private time costs,
we used UK DfT WebTAG values directly and did not convert these to an EU average
using a value transfer method based on relative GDP/capita (see Ricardo-AEA, 2014 for a
method to do this). Using the value transfer method would require either that the relative
GDP/capita of the UK to the EU average remained the same over the calculation period,
as in the baseline, or that the change would be calculated based on forecasts of UK and EU
GDP/capita over this period. To minimise the amount of uncertainty in the calculations
we did not do this. For completeness, we note here that in 2010 (the WebTAG baseline),
the ratio of UK GDP/capita to the EU average was approximately 1.2.
405
Source: Capros et al (2013).
406
From limited data available for 12 European countries in 2009, 98% of vehicle-km were travelled
in France, Germany and the UK. (Source Eurostat [road_tf_road]).

European Added Value Assessment
PE 615.635 186
In the analysis, we have not made any additional assumptions about parking costs. We did
not explicitly include a parking charge element in the transport user costs. If we assume
that a proportion of user costs are for parking, then when vehicles are shared, as in our
model for FAV ownership, these costs are automatically reduced. However, there will be
costs associated with parking FAVs, which will depend both on the ownership model and
the infrastructure. If a FAV drives itself to a specially designated out-of-town parking
place, there will be an extra trip cost and potentially a parking fee. It is not clear whether
these costs would be larger or smaller than city centre parking costs. One study from North
America indicates an annualised saving of $2000 if parking spaces are moved out of the
Central Business District (Litman, 2012). Shared ownership models could also mean a
reduction in the need for off-street parking spaces at residential locations. However, it is
not clear, given the time period of study (2025-2040) and that much parking in Europe is
on-street, what this would mean for our analysis. Making additional assumptions to take
account of these factors would add to the uncertainty in the calculations but would not
provide additional insights into the impact in changes to liability legislation.
As far as we are aware, data on health impacts and wider economic impacts are not
available at a European level. For health we used values for medium activity levels from
the New Zealand Transport Agency (Genter et al., 2008) for combined slow (walk and
bicycle) modes. To determine the contribution of travelling by public transport modes to
active travel benefits, we then assume that walking or cycling accounts for 10% of a bus
trip and 1% of a rail trip. Wider economic impacts arise from the fact that markets are not
competitive and direct user impacts are amplified throughout the economy. According to
UK DfT guidance (DfT, 2014), there are three main sources of wider impacts from
transport: agglomeration; output changes on imperfectly competitive markets; and tax
revenues from labour market impacts. We consider that agglomeration effects are relevant
to this study as changes in transport costs can affect the accessibility of employment centres
to workers and, as a consequence, the level of agglomeration. A detailed calculation is
outside the scope of this study. A recent study on bus transport (PTEG, 2013) estimates that
90% of agglomeration impacts occur in urban areas and that these could represent 46 per
cent of car congestion costs. We apply this approach of using a congestion cost multiplier
but employ a lower value (0.25) to account for car kilometres outside metropolitan areas.
The impact of imperfect competition on business travel is determined by multiplying the
benefits accruing to business travellers by a factor of 0.1 (DfT, 2014).
Calculation of demand
We start from the forecast annual demand (vkm) for cars in year t and develop a
simplified stock model:
00
c N S c
tt
V kN
where
,,
i
i N S
are the proportions of demand driven by new and second hand cars,
respectively.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 187
0
c
t
N
is the number of cars in year t and k is the annual kilometres driven per car (referred
to hereafter as mileage). We firstly assume that mileage k is fixed for all vehicle types for
all years and that there is no car sharing, so that proportion of sales of different vehicle
types corresponds to proportion of kilometres driven. (This is only really important for
FAVs, as for others we use forecast demand directly).
For FAVs, we then have:
0 0 0
AV N AV c S AV c
t t t t tL t
V V V
where cars have a fixed average lifetime (tL) and we assume FAVs enter the second-hand
market at the same penetration rate as for new cars. We expect the market penetration of
FAVs to reflect the value placed on quality differences as well as cost differences between
normal cars and FAVs.
There will also be induced demand, which is effectively increased mileage per FAV over
the baseline.
AV
It
V
is the induced demand for FAVs due to a) access for non-drivers, b)
increased effective road capacity, and c) reduced cost per km of driving (part of this
covered by effective capacity increase). Let
0
AV AV AV
It t
V V kN
We assume a value for β and then check that this is consistent with values from the
literature. In terms of access for non-drivers, Harper et al (2015) calculate the maximum
additional demand from the elderly, non-drivers and those with medical conditions as
being 12% of overall demand by comparison with existing trip-making behaviour of other
sectors of the population. This would indicate that there may be considerable room for
growth in the automated vehicle market to satisfy demand beyond the forecasts used in
this study. The increase in capacity as a function of the proportion of FAVs has been
estimated based on data in Schladover et al. (2012) relating the increase in effective
highway capacity to the market penetration of vehicles with CACC.
407
Using elasticities of
demand with respect to capacity and travel cost (Hymel et al. (2010)), we can then calculate
the expected increase in demand due to the expansion in effective capacity and lower costs
resulting from FAVs. These calculations provide an order of magnitude estimate for
induced demand, given that no data on FAVs are available. We note that the values from
Hymel et al (2010) are lower than others in the literature but this is attributed to their use
of longer time series and aggregated data, and that the effective capacity benefits from AVs
are expected to increase strongly with market penetration. Our assumption for the increase
in VKT for FAVs is also in line with other published estimates (Fagnant & Kockelman,
2015).
407
Fernandez and Nunez (2013) also provide some quantification of the capacity effects of
platooning.

European Added Value Assessment
PE 615.635 188
AV
Mt
V
is the modal shift to FAV from other existing modes (excluding standard car)
0
AV AV AV AV
t t It Mt
V V V V
The modal shifts are calculated using cross-price elasticities of demand.
We assume no other changes to demand for other modes apart from the shift to FAVs.
Then
0
0
1,
1 1 ,
N AV S c
tt
c
t
N AV S AV c
t t tL t
V t tL
V
V t tL
for non-AV cars.
0
m m AV
t t mt
V V V
for m=bus, active modes
We assume that all non-FAV cars are privately owned as the demand data do not
distinguish between privately owned vehicles and taxis or other shared, non-public
transport, vehicles. If we then assume that a proportion of AVs
sh
are shared vehicles
and they undertake proportionally more journeys
sh
k
then
0
1
1
AV sh sh sh AV
t
sh sh sh AV
t
V kN
V
AV AV AV AV
t t It Mt
V V V V
The use of shared vehicles provides a second mechanism by which FAVs may increase
vehicle kilometres travelled, over the baseline demand forecast by market penetration of
new vehicle sales. We assume that 10% of vehicles are shared and that these travel five
times the distance of a normal car. The proportion of shared vehicles and the distance
travelled by shared vehicles is rather arbitrary and is therefore subject to sensitivity
analysis. We note that Fagnant &Kockelman (2015) also assume 10% shared vehicles but
ten times the demand for these in vkm travelled.
EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 189
Congestion costs
Travel time cost per km by mode i is given by:
()
T
i i i
TC VOT T V
where
i
i
VV
for all modes above (subscript t dropped for
convenience).
The travel time function (per km) consists of a free (uncongested) travel time and a
congestion-related component, which depends on the ratio of volume to capacity. We can
expect that lorries and buses effectively reduce capacity relative to cars because they travel
more slowly. FAVs (both passenger and freight) on the other hand can be expected to
effectively increase road capacity because they make better use of existing road capacity.
The simplest approach
408
is to assume that the times taken to travel one km by the
various mode are linearly related so that
1
( ) 1
1
FAV
T
i i i c
F
TC VOT T V
Then
()
()
()
()
T
i i i
i
T
i i i i i
i
ii
T
i i i i
i
TTC V VOT T V
dTTC dT V
V VOT VOT T V
dV dV
dT V
V VOT TC
dV
The first term on the LHS gives the marginal external congestion costs of adding a vkm of
mode i to the network. (The second term is the private time costs of the additional km
which are included in the generalised price to the user – the external costs are not.)
Hence we can use both the difference in the VOT for FAVs relative to cars, and the
difference and the multiplicative factor α
FAV,
to determine the effect of AVs on external
congestions costs.
Note that
( ) ( )
i
dT V dT V
dV dV
assumes capacity is fixed. If AVs increase effective road
capacity, then we have (approximately)
408
We follow the approach used in the TREMOVE model, TML (2007) in this regard.

European Added Value Assessment
PE 615.635 190
( ) ( )
1
CV
C
dT V dT V
dV dV
where the elasticity
CV
represents the effective percentage change in capacity for a 1%
change in demand (of FAVs). This depends on the market penetration of FAVs.
Accident costs
For the calculation of accident costs we follow the methodology set out in
Lindberg (2001), UNITE (2003) and Ricardo-AEA (2014). In the following we
assume accident costs are averaged over different severities (fatal, serious, light)
and that the cost calculation can be applied to different road types (urban,
motorway, rural etc.). The total accident costs involving a vehicle of type j are
then given by
r ( )
A
j j j
TC a b c V
where
j
j
j
X
r
V
is the accident risk ,
j
X
is the number of accidents between mode j
and other modes and
j
V
represents demand for mode j.
The cost categories a, b and c are defined as follows (per km driven):
a - the willingness to pay (WTP) of road users to avoid an accident
b - the WTP of friends and relatives for the road user to avoid an accident
c - the pure economic costs (loss of output, medical, police etc).
In practice, b is considered to be negligible and c is about 10% of a. They are also averaged
over accident severity for each road type.
Assuming further that
j
A
is the share of the accident costs that are borne by mode j and
that the user internalises the perceived accident costs for his or her user type, the marginal
external accident cost for mode j can then be derived as
r ( )
r ( )(1 ) r ( )
r ( )(1 ) r
A
j
A
j j j
j
j j j j
j j j j j
dTC
MEC A a b
dV
a b c E A a b
a b c A E A c

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 191
where
jj
j
jj
V dr
E
r dV
is the risk elasticity.
The marginal external accident cost includes the effect of an additional user of mode j on
other users of that mode, on other modes and the external costs to society.
If we now assume that c=0.1(a+b) then we obtain
r ( )(1 ) r ( )
r ( ) (1 ) 0.9
A
j j j j j
j j j
MEC a b c E A a b
a b c E A
In our calculations, we use data from Ricardo-AEA (2014). The most recent calculations of
marginal external accident costs (per km) assume the following:
• E=-0.25 across all modes and accident severities and road types
• Value of a Statistical Life (VSL) = €1.7 million (2010 prices) – this gives a+b for
fatal accidents; serious injuries are 13% of this, and light injuries 1%
• Shares Aj of cost internalised - 0.76 cars, 0.22 freight, 0.16 buses
In terms of the external costs per vkm provided (
A
j
MEC
), these are already aggregated
over accident types. Information is not provided on the risk of different types of
accidents, so the weight they are given in the aggregation is not known. We assume that
these relative risks remain unchanged in our analysis and focus on the aggregate risk
over all accident types for each vehicle type.
For the purposes of our calculations we need to adjust the existing MECs in two ways.
Firstly, we need to determine accident costs for standard cars during our calculation period
2025 to 2040. To do this we incorporate the decreasing trend in road accidents in the EU.
Recently this seems to be about 8% per year.
409
Assuming this continues, comparing with
forecast travel demand, this suggests that the accident rate (risk) decreases by about 50%
from its 2010 value and then remains fixed.
Secondly, we need to account for the safety benefits of FAVs over standard cars. Fagnant
and Kockelman say that at 10% penetration, AVs are 50% safer. From EU data, 72% of
accidents arise from human error (90% US)
410
. So if we say AVs reduce the number of
409
Own calculations based on EU data. (source:
http://ec.europa.eu/transport/road_safety/specialist/statistics/index_en.htm)
410
Thomas et al. (2013), NHTSA (2008).

European Added Value Assessment
PE 615.635 192
accidents by half for the same volume as normal cars, this implies the risk is half that of
normal cars.
So since rj scales external cost, we will rely on this parameter to adjust the costs for both
normal road vehicles and AVs in terms of the decreasing trend in accident rates and the
impact of AVs on accident risk.
The Aj can be used to adjust for how insurance costs may be applied.
We have no data to indicate how the risk elasticity may change over time. While a different
value could be used for AVs, we do not do this.

EU Common Approach on the liability rules and insurance related to the Connected and Autonomous Vehicles
PE 615.635 193
Additional references
Balcombe, R., R. Mackett, N. Paulley, J. Preston, J. Shires, H. Titheridge, M. Wardman & P.
White. 2004. The demand for public transport: a practical guide. TRL report TRL593.
Boston Consulting Group (2015). Revolution in the Driver's Seat: The Road to Autonomous
Vehicles. (https://www.bcgperspectives.com/content/articles/automotive-consumer-
insight-revolution-drivers-seat-road-autonomous-vehicles/.)
Capros, P et al. (2013). EU Energy, Transport and GHG Emissions Trends to 2050:
Reference Scenario 2013. European Commission, 2013.
De Ceuster et al. (2007). TREMOVE Final Report, TML, 2007.
Department for Transport. 2015. WebTAG Databook Autumn 2015 release v1.4.
Department for Transport. 2014. TAG Unit 2.1. Wider Impacts.DG-Regio (2014): Guide to
Cost-Benefit Analysis of Investment Projects. European Commission.
Fagnant, D & K Kockelman. (2015). Preparing a Nation for Autonomous Vehicles:
Opportunities, Barriers And Policy Recommendations for Capitalizing on Self-Driven
Vehicles. Transportation Research Part A 77: 167-181, 2015.
Fernandez, P and U Nunez. (2010). Platooning of Autonomous Vehicles with Intervehicle
Communications in SUMO Traffic Simulator. 13th International IEEE Annual Conference
on Intelligent Transportation Systems Madeira, 2010.
Genter, J., S. Donovan, B. Petrenas & H. Badland. 2008. Valuing the Health Benefits of
Active Modes. NZ Transport Agency Research Report 359.
Harper C, Mangones S, Hendricksso C, Samaras C (2015). Bounding the Potential Increases
in Vehicles Miles Traveled for the Non-Driving and Elderly Populations and People with
Travel-Restrictive Medical Conditions in an Automated Vehicle Environment.
Transportation Research Board 94th Annual Meeting, Washington DC.
Hymel, K. M., K. A. Small and K. Van Dender (2010). 'Induced demand and rebound effects
in road transport.' Transportation Research Part B: Methodological 44(10): pp. 1220-1241.
Insurance Europe (2015). European Motor Insurance Markets, November 2015.
Lindberg, G (2001). Traffic Insurance and Accident Externality Charges. Journal of
Transport Economics and Policy, 35, pp. 399-416.
Lindberg, G (2002) Deliverable 9, Marginal accident costs – case studies. UNITE
(UNIfication of accounts and marginal costs for Transport Efficiency) Deliverable 9.
Funded by 5th Framework RTD Programme. ITS, University of Leeds, 2002.
Litman, Todd (2012) Parking Management: Strategies, Evaluation and Planning. Victoria
Transport Policy Institute. Victoria, B.C.
National Highway Traffic Safety Administration (2008) National Motor Vehicle Crash
Causation Survey. U.S. Department of Transportation, Report DOT HS 811 059.
PTEG. 2013. The Case for the Urban Bus: The Economic and Social Value of Bus Networks
in Metropolitan Areas. As of 10 September 2015:
http://www.pteg.net/system/files/general-docs/pteg Case for bus report FINAL.pdf
Ricardo-AEA (2014). Update of the Handbook on External Costs of Transport. Final Report.
Prepared for the European Commission: DG MOVE.
Schladover S, Su D, X-Y Lu (2012). Impacts of Cooperative Adaptive Cruise Control on
Freeway Traffic Flow. Transportation Research Record: Journal of the Transportation
Research Board, No. 2324, pp. 63–70.

European Added Value Assessment
PE 615.635 194
Steven E. Shladover, Dongyan Su, and Xiao-Yun Lu (2012). Impacts of Cooperative
Adaptive Cruise Control on Freeway Traffic Flow. Transportation Research Record:
Journal of the Transportation Research Board, 2324, pp. 63–70.
Thomas, P, Morris, A, Talbot, R and H Fagerlind (2013). Identifying the causes of road
crashes in Europe. Ann Adv Automot Med. 2013 Sep; 57: 13–22.

www.europarl.europa.eu/thinktank (Internet) www.epthinktank.eu (blog) www.eprs.sso.ep.parl.union.eu (Intranet)
This assessment of European added value finds that
revision of the EU's current legislative framework is
necessary, notably as regards the regulation of civil
liability and insurance. Quantitative assessment of
added value, at the current stage of technological
development, proved difficult and inconclusive. A
qualitative analysis, however, provided evidence that
action at EU level would (i) promote legal certainty;
(ii) reduce the transaction costs for car manufacturers
and public administrations arising from differences in
national liability rules and systems for the
determination and calculation of damages; and
(iii) secure effective consumer protection.
