
CPSC-663: Real-Time Systems Operating-System Issues
1
© R. Bettati!
Operating Systems Issues for Real-Time!
• Timing, Scheduling Latencies, and Preemption (example: Linux)!
• Scheduling Policies (example: Solaris)!
• Device Driver Architectures for Real-Time (example: Windows)!
• Integration of Hard Real-Time and General-Purpose OS
Architectures (example: Windows / Linux)!
© R. Bettati!
Operating Systems Issues for Real-Time!
• Timing, Scheduling Latencies, and Preemption (example: Linux)!
• Scheduling Policies (example: Solaris)!
• Device Driver Architectures for Real-Time (example: Windows)!
• Integration of Hard Real-Time and General-Purpose OS
Architectures (example: Windows / Linux)!

CPSC-663: Real-Time Systems Operating-System Issues
2
© R. Bettati!
Timing, Scheduling Latency, and Preemption
(Real-Time Performance of Linux)!
• Among others: “A Measurement-Based Analysis of the Real-
Time Performance of Linux” (L. Abeni , A. Goel, C. Krasic, J.
Snow, J. Walpole) [RTAS 2002]!
© R. Bettati!
OS Latency!
Definition [OS Latency]
Let T be a task belonging to a time-sensitive application
that requires execution at time t, and let t’ be the time at
which T is actually scheduled; we define the OS latency
experienced by T as L= t’ – t.!

CPSC-663: Real-Time Systems Operating-System Issues
3
© R. Bettati!
Sources of OS Latency!
• Timer Resolution (L
timer
)!
– Timer are generally implemented using a periodic tick interrupt.
A task that sleeps for an arbitrary amount of time can
experience some timer resolution latency if its expected
activation time is not on a tick boundary.!
• Scheduling Jitter (L
SJ
)!
– Task is not highest in scheduling queue.!
• Non-Preemptable Portions (L
NP
)!
– Latency can be caused by non-preemptable sections in kernel
and in drivers. (e.g. ISRs, bottom halves, tasklets).!
© R. Bettati!
Timer Resolution!
• Standard Linux timers are triggered by a periodic tick interrupt.!
• On x86 machines it is generated by the Programmable Interval
Timer (PIT) with period
T
tick
= 10ms.!
• How about decreasing
T
tick
?!
• High-resolution timers using aperiodic interrupt capabilities in
modern APICs (Advanced Programmable Interrupt Controller).!
• Timer resolution possible in range of 4-6musec.!

CPSC-663: Real-Time Systems Operating-System Issues
4
© R. Bettati!
Non-Preemptable Section Latency!
• Standard Linux:!
– monolithic structure of kernel.!
– Allows execution of at most one thread in kernel. This is achieved by
disabling preemption when an execution flow enters the kernel, i.e.,
when an interrupt fires or when a system call is invoked. !
– Latency can be as large as 28ms.!
• Low-Latency Linux:!
– Insert explicit preemption points (re-scheduling points) inside the
kernel.!
– Implemented in RED Linux and Andrew Morton’s low-latency patch.!
• Preemptable Linux:!
– To support full kernel preemptability, kernel data must be explicitly
protected using mutexes or spinlocks.!
– Linux preemptable-kernel patch disables preemption only when
spinlock is held.!
– Latency determined by max. amound of time for which a spinlock is
held plus maximum time taken by ISRs, bottom halves, and tasklets.!
• Preemptable Lock-Breaking Linux:!
– Spinlocks are broken by releasing spinlocks at strategic points.!
© R. Bettati!
Preemptable Lock Breaking: Example!
• This function reclaims cached dentry structures in fs/
dchache.c
• High-latency point.!
• Why count iterations at all?!

CPSC-663: Real-Time Systems Operating-System Issues
5
© R. Bettati!
Test Programs!
• Measuring
L
timer
:!
– Run test task on lightly loaded system, to avoid
L
np
.!
– Set up a periodic signal (using itimer())!
• Measuring
L
np
:!
– Run test task against background tasks!
– Test Task:!
• Read current time
t
1
!
• Sleep for a time
T
!
• Read time
t
2
, and compute
L
np
= t
2
- (t
1
+ T)
!
– How to read
t
1
and
t
2
? ( gettimeofday() ?)!
© R. Bettati!
Timer Latency!

CPSC-663: Real-Time Systems Operating-System Issues
6
© R. Bettati!
Test Programs!
• Measuring
L
timer
:!
– Run test task on lightly loaded system, to avoid
L
np
.!
– Set up a periodic signal (using itimer())!
• Measuring
L
np
:!
– Run test task against background tasks!
– Test Task:!
• Read current time
t
1
!
• Sleep for a time
T
!
• Read time
t
2
, and compute
L
np
= t
2
- (t
1
+ T)
!
– How to read
t
1
and
t
2
? ( gettimeofday() ?)!
© R. Bettati!
Measuring
L
np
!
• Memory Stress:"
– Page fault handler invoked repeatedly.!
• Console-Switch Stress:!
– Console driver contains long non-preemptable paths.!
• I/O Stress:"
– Systems calls that move large amounts of data between user and
kernel space, or from kernel memory to hardware peripherals.!
• Procfs Stress:"
– Concurrent access to /proc file system must be protected by non-
preemptable sections.!
• Fork Stress:"
– New processes created inside non-preemptable section and requires
copying of large amounts of data.!
– Overhead of scheduler increases as number of active processes
increases.!

CPSC-663: Real-Time Systems Operating-System Issues
7
© R. Bettati!
OS Non-Preemptable Section Latency!
© R. Bettati!
Background Load Tests!
Standard Linux!

CPSC-663: Real-Time Systems Operating-System Issues
8
© R. Bettati!
Background Load Tests!
Low-Latency Kernel!
© R. Bettati!
Background Load Tests!
Preemptable Kernel!

CPSC-663: Real-Time Systems Operating-System Issues
9
© R. Bettati!
Background Load Tests!
Lock-Breaking Preemptable Kernel!
© R. Bettati!
OS Non-Preemptable Portion Latency!

CPSC-663: Real-Time Systems Operating-System Issues
10
© R. Bettati!
Non-Preemptable Portion Latency!
© R. Bettati!
Latencies !
CPSC-663: Real-Time Systems Operating-System Issues
11
© R. Bettati!
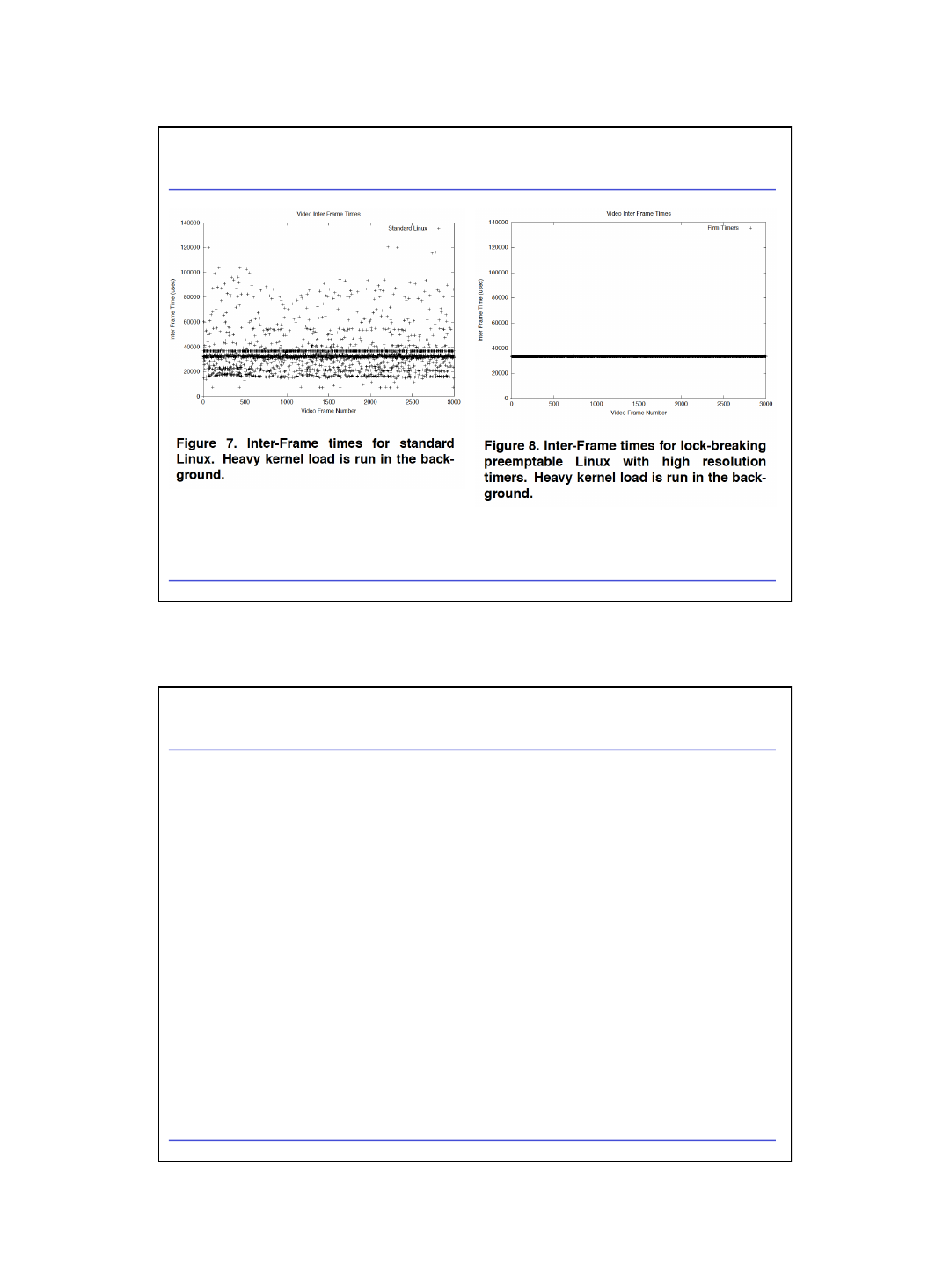
Inter Frame Times!
© R. Bettati!
Operating Systems Issues for Real-Time!
• Timing, Scheduling Latencies, and Preemption (example: Linux)!
• Scheduling Policies (example: Solaris)!
• Device Driver Architectures for Real-Time (example: Windows)!
• Integration of Hard Real-Time and General-Purpose OS
Architectures (example: Windows / Linux)!

CPSC-663: Real-Time Systems Operating-System Issues
12
© R. Bettati!
(Some) Real-Time Operating Systems Issues!
• (Some, random) Issues with Real-Time OSs!
!
• Problems with the design of general-purpose real-time capable OS:
Solaris!
J.Nieh, J.G.Hanko, J.D. Northcutt, G.A.Wall.!
“SVR4 UNIX Scheduler Unacceptable for Multimedia
Applications.” NOSSDAV ‘93.!
URL: http://www.cs.columbia.edu/~nieh/#publications!
© R. Bettati!
So, You want to make your OS Real-Time?!!
• Making general-purpose OS real-time capable:!
– Scheduling of tasks in kernel should be deterministic.
Kernel should be free from unbounded priority
inversion.!
– Deterministic dispatch latency.!
– Allow for mixed-mode applications: real-time and
non-real-time components.!
– Appropriate for multiprocessor machines.!
– Provide standard interface to user, such as POSIX.!
!

CPSC-663: Real-Time Systems Operating-System Issues
13
© R. Bettati!
Kernel Dispatch Latency!
• Historically: unbounded dispatch latency caused by
non-
preemptible kernel
.!
– Solution 1: Well-defined preemption points. (?)!
– Solution 2: Fully synchronize access by kernel code
to kernel data structures. !
• Reduces set of non-preemptible portions in kernel.!
• Kernel is multithreaded.!
more about this later…!
© R. Bettati!
Scheduling Classes!
•
Time-Sharing
class:!
– round robin scheduling.!
•
Sys
class: !
– fixed priority scheduling,!
– not accessible by the user.!
•
Real-Time
class: !
– fixed priority scheduling.!
• priocntl(2)!
– Change scheduling class or other
scheduling parameters.!
interrupt
RT
sys
TS
TS
+20
-20
0
59
99
159
RT
0
59

CPSC-663: Real-Time Systems Operating-System Issues
14
© R. Bettati!
Priority Inversion!
• Priority inversion happens due to !
– non-preemptable portions!
– access to synchronization objects!
– “hidden scheduling”!
• Synchronization Objects (mutex, r/w locks)!
– Solution: basic priority-inheritance protocol!
• Hidden Scheduling!
– Work done asynchronously in kernel on behalf of threads
without regard to their priority.!
– Example: streams processing!
– Example: timeouts done at lowest interrupt level!
– Solution: Move this code into kernel threads running at
sys
priority level.!
process
user
kernel
check pending
streams requests
© R. Bettati!
Priority Inheritance!
• Primitives:!
– pi_willto(thread) !impose priority of argument thread onto all !
! !!threads that block it, directly or indirectly!
– pi_waive()! !release priority inheritance!
• The function pi_willto() is called after the thread has been put to sleep in the
queue associated with the synchronization object. The information about the
synchronization object can therefore be recovered.!

CPSC-663: Real-Time Systems Operating-System Issues
15
© R. Bettati!
Priority Inheritance and R/W Locks!
• Priority inheritance for readers/writers locks:!
– when writer owns the lock: no problem!
– when readers own the lock: !
• potentially many “owners”; not practical to keep
pointer from resource to every thread that owns
it!
• Solution: define a single “owner-of-record”, which
is only thread that inherits priority.!
© R. Bettati!
J.Nieh, J.G.Hanko, J.D. Northcutt, G.A.Wall.!
“SVR4 UNIX Scheduler Unacceptable for Multimedia Applications.” NOSSDAV ‘93.!
URL: http://www.cs.columbia.edu/~nieh/#publications
Applicability of SunOS 5.0 for Multimedia Applications!
• Objectives of real-time OS for general-purpose workstations!
– Provide real-time guarantees without reducing general
capabilities of workstations!
– Manage resources so that other applications can operate
correctly.!
– SunOS 5.0 (SVR4) provides real-time static-priority scheduler.!
• Question: How well are resources managed?!

CPSC-663: Real-Time Systems Operating-System Issues
16
© R. Bettati!
Experimental Evaluation: Overview!
• Platform!
– Sun Sparc10!
– Solaris 2.2!
– Scheduling classes (RT class, TS class, SYS class)!
• Experiment (measurement) criteria:!
– Interactive:!
• minimize average and variance between user input and response !
• Typing, cursor motion, mouse selection <= 50 - 150 ms.!
– Continuous media:!
• Minimize difference between average display rate and desired display rate.!
• Minimize variance of display rate.!
– Batch:!
• “Minimize difference between actual time of completion and minimum time
of completion when whole machine is dedicated.”!
© R. Bettati!
Experiment: Workload!
• 3 classes of workload!
• Interactive: (editors, GUIs)!
– TYPING: Emulate a user typing, and display characters on the screen.!
• Continuous media: (television, teleconference)!
– VIDEO: !Capture data from digitizer board and display through x- !
!windows server.!
• Batch: (compilations, scientific computation)!
– make: !Repeatedly fork and wait for small processes to complete.!
• Instrumentation of application and system software components does not
measurably change the performance.!

CPSC-663: Real-Time Systems Operating-System Issues
17
© R. Bettati!
Experiment: The Baseline!
• What is a well-behaved system?!
– Concurrent applications should make some progress!
– No case where system fails to respond to operator input!
– User should exercise wide range of influence over system
behavior.!
Application Measurement Mean Std. Dev.
Typing Latency between character arrival 38.5 ms 15.7 ms
and rendering to frame buffer
Video Time between display of successive 112 ms 9.75 ms
frames
Compute Time to execute one loop iteration 149 ms 6.79 ms
Table: Application Baseline Values
© R. Bettati!
Experiment 1: Run all tasks in TS class!
• Window system is no longer accepting input
events from mouse or keyboard.!
• Command interpreter not permitted to run.!
• System blocked by batch-job!
– Identified as I/O intensive interactive job.
Gets priority boosts for sleeping.!
• Window server develops backlog of service
requests. As it works down its queue, it gets
identified as compute bound.!
• Table entries are relative to baseline (tall is
better)!
• T: TYPING character latency!
• V: time between display of successive frames for
VIDEO.!
• C: time for one iteration in COMPUTE.!

CPSC-663: Real-Time Systems Operating-System Issues
18
© R. Bettati!
What can the System Administrator do?!
Increase priority of X-Server,
decrease priority of batch task!
In addition, decrease
priority of VIDEO a
bit!
Decrease priority of VIDEO a
little bit more.!
© R. Bettati!
Play with RT Class!

CPSC-663: Real-Time Systems Operating-System Issues
19
© R. Bettati!
Result: New TS Class!
• Removes anomalies of identifying batch jobs
as interactive and vice versa.!
• Ensures that each process makes steady
progress.!
• Reduces feedback interval!
• Included in Solaris 2.3.!
© R. Bettati!
Operating Systems Issues for Real-Time!
• Timing, Scheduling Latencies, and Preemption (example: Linux)!
• Scheduling Policies (example: Solaris)!
• Device Driver Architectures for Real-Time (example: Windows)!
• Integration of Hard Real-Time and General-Purpose OS
Architectures (example: Windows / Linux)!
CPSC-663: Real-Time Systems Operating-System Issues
20
© R. Bettati!
Windows NT Family and Real-Time?!
• Reading: “Inside Microsoft Windows 7”, (Solomon, Russinovich,
Microsoft Programming Series)!
• “Real-Time Systems and Microsoft Windows NT” (MSDN Library)!
• “Windows XP with RTX - The off-the-shelf platform for
Integrated Communication Equipment” (www.venturcom.com)!
© R. Bettati!
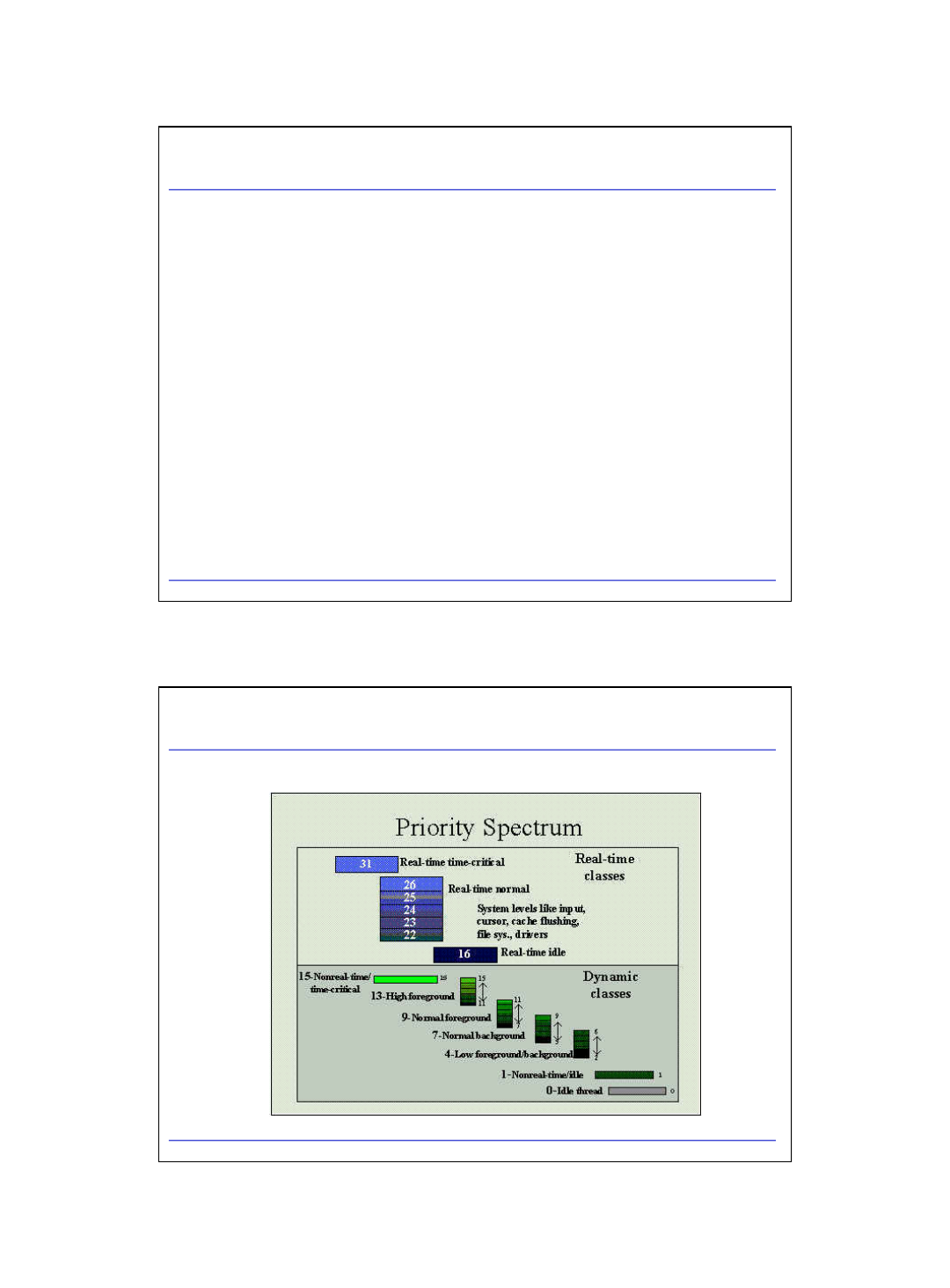
Priorities in Windows NT/2000/XP/7/8/…!

CPSC-663: Real-Time Systems Operating-System Issues
21
© R. Bettati!
Priority Levels vs. Interrupt Levels!
31: High!
30: Power Fail!
29: Inter-Processor Interrupt!
28: Clock!
27: Profile!
26: Device n!
3: Device 1!
2: DPC/dispatch!
1: APC!
0: Passive!
Hardware
Interrupts!
Software
Interrupts!
Thread
Priorities 0-31!
• The HAL maps hardware-
interrupt numbers to IRQLs.!
• IRQLs are not the same as
IRQs in x86.!
• Scheduling priority is
attribute of thread, while
IRQL is attribute of an
interrupt source.!
• Lazy IRQL management for
slow PICs.!
• Code running at DPC/dispatch
level or above can’t wait on
object if so would necessitate
scheduler to invoke another
thread.!
© R. Bettati!
IO System Components (Windows 2k)!
user mode
kernel mode
HAL
WDM WMI
routines
PnP
manager
Power
manager
I/O
manager
I/O system
drivers
...
setup
components
user-mode
PnP
manager
WMI
service
Applications
Win32
services
.inf files
.cat files
registry

CPSC-663: Real-Time Systems Operating-System Issues
22
© R. Bettati!
Device Driver Layering!
© R. Bettati!
Device Driver Layering (2)!

CPSC-663: Real-Time Systems Operating-System Issues
23
© R. Bettati!
dispatch
routines
Primary Device Driver Routines!
IO
system
interrupt
service routine
DPC routine
initialization
routine
add-device
routine
dispatch
routines
dispatch
routines
start I/O
routine
• Initialization routine This routine
initializes hardware and sets up data
structures used by the driver at
startup time.!
• Interrupt service routine (ISR) This
routine handles an interrupt on the
device that the device driver
controls.!
• Deferred processing call (DPC) One or
more DPCs handle non–time-critical
processing for the driver.!
• System thread Some, but not all,
drivers will have a system thread for
very low- priority work.!
• NT/2000 device drivers run entirely within the system process and have access
to all hardware through the HAL. A typical device driver will have several
components:!
© R. Bettati!
Control Flow for an IO Operation!
Call ReadFile()
Call NTReadFile()
return to caller
INT 2E
return to caller
Call NTReadFile()
dismiss interrupt
Invoke driver
dismiss interrupt
Initiate I/O operation
dismiss interrupt
User mode
Kernel mode
Whether to wait depends
on “overlapped” flag
ReadFile
NtReadFile
KiSystemService
NtReadFile
Application
Kernel32.dll
Ntdll.dll
Ntoskrnl.exe
Ntoskrnl.exe
Driver.sys

CPSC-663: Real-Time Systems Operating-System Issues
24
© R. Bettati!
Queueing and Completing a Synchronous Request!
© R. Bettati!
Servicing a Device Interrupt (only Phase I)!

CPSC-663: Real-Time Systems Operating-System Issues
25
© R. Bettati!
Servicing a Device Interrupt (Phase II)!
© R. Bettati!
Completing an I/O Request (Phase I)!

CPSC-663: Real-Time Systems Operating-System Issues
26
© R. Bettati!
Completing an I/O Request (Phase II)!
© R. Bettati!
Memory Management!
• Paging I/O occurs at a lower priority level than the real-time
priority process levels. Paging within the real-time process is still
free to occur, but this really ensures that background virtual
memory management won't interfere with processing at real-time
priorities.!
• Windows NT permits an application to lock itself into memory so
that it is not affected by paging within its own process. This
allows even very large processes (such as raster image processing,
where some processes are over 100MB) to lock all their memory
down into physical memory and avoid the overhead of paging, while
allowing the rest of the system to function normally. !
• Windows NT memory management allows for memory mapping,
which permits multiple processes—even device drivers and user
applications—to share the same physical memory. This results in
very fast data transfers between cooperating processes or
between a driver and an application. Memory mapping can be used
to dramatically enhance real-time performance. "

CPSC-663: Real-Time Systems Operating-System Issues
27
© R. Bettati!
Windows NT/2000/XP/… and Real-Time Processing!
• Windows NT/2000/XP/… does not prioritize device IRQs in
controllable way.!
• User-level applications execute only when a processor’s IRQL is at
passive level.!
• System’s devices and device drivers – not the OS – ultimately
determine the worst-case delay.!
• This is a problem with off-the-shelf hardware and drivers.!
• System designer must bound the length of device’s ISR and DPC in
the worst case.!
• Embedded versions of Windows NT/2000/XP… provide control over
memory footprint etc, but are not real-time capable.!
• Extensions of real-time kernels can be provided through custom
extensions of the HAL.!
© R. Bettati!
Operating Systems Issues for Real-Time!
• Timing, Scheduling Latencies, and Preemption (example: Linux)!
• Scheduling Policies (example: Solaris)!
• Device Driver Architectures for Real-Time (example: Windows)!
• Integration of Hard Real-Time and General-Purpose OS
Architectures (example: Windows / Linux)!

CPSC-663: Real-Time Systems Operating-System Issues
28
© R. Bettati!
Real-Time Executives - Example:
VenturCom RTX Architecture!
